I am not sure if I have missed something on here regarding getting started with Reach RS Base and Rover working in Carlson SurvCE Software.
I know SurvCE well but for the life of me I am not managing to get the Base and Rover talking to each other.
In the documentation (Reach RS SurvCE Setup Procedure) they only explain how to set up the rover and not the Base. What is really strange for me is the fact that the Base connection setup in SurvCE software does not supply you with the Emlid option to select in the manufacturing stage.
Is there maybe someone out there that can supply me with the correct settings.
I managed to connect both base and rover with the Windows mobile logger in SurvCE. But when I want to connect the base station it does not give me a Emlid Reach option to select under the manufacturers drop down menu.
I only managed to connect the rover.
What am I missing here? Is their anybody out there that has managed to use Carlson SurveCE software successfully with Reach RS Base and Rover to point collection and setting out work?
Please note that I will be willing to pay for assistance as swell.
I would really appreciate any assistance regarding this.
SurvCE intergates with Reach RS only for data collection, it has no ability to push settings to the receiver. This is why setting up base station through SurvCE is not possible at the moment. You will need to do it through ReachView. Further data collection can be done with SurvCE.
As Igor already explained, the Reach RS will calculate your position based on RTK data but it will do all the processing on its own. The final positioning data (most likely NMEA string) can be sent to Carlson via bluetooth, for example, and all the point collection, linework, and layout tools of Carlson can be taken advantage of. Let us know and send us some pictures once it’s working. I can testify that they do connect but I haven’t really used Carlson other than just testing it.
Thank you for the reply to my messages. I really do appreciate it.,
I am really getting stuck with the setting up of my Reach RS base and rover.
I do understand now that it is impossible to connect to the base through SurvCE.
To be honest with you guys, I am so confused now with setting up my Base and Rover in RTK mode, and most of my settings in Reach View are most likely also a huge mess and incorrect.
Is there any way that one of you can please provide me with some step by step instructions for my Base fist and then also what the settings in the rover must be, to be able to get the corrections from the base over LoRa Radio. I also need to know what the correct Satellites will be for where I am, South of the Equator in Africa. I am Currently in Angola west Africa.
Guys I am willing to pay for your help here. I am really getting desperate.
Like I said, I’m so confused now that I have no idea where up or down is.
If you want to reset your ReachView settings to default it is very easy to do. Just click the gear button and you will see a reset to default button there.
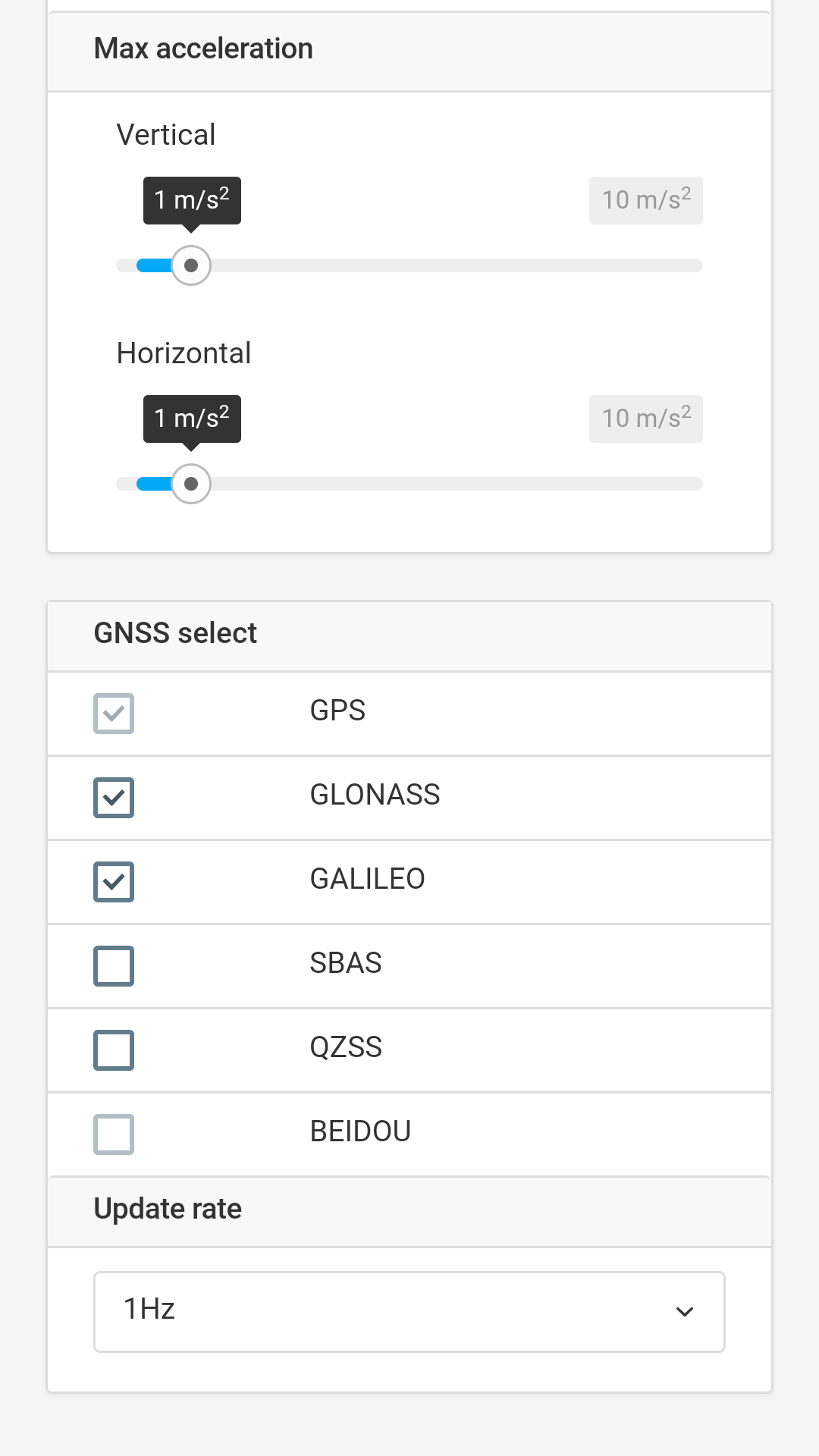
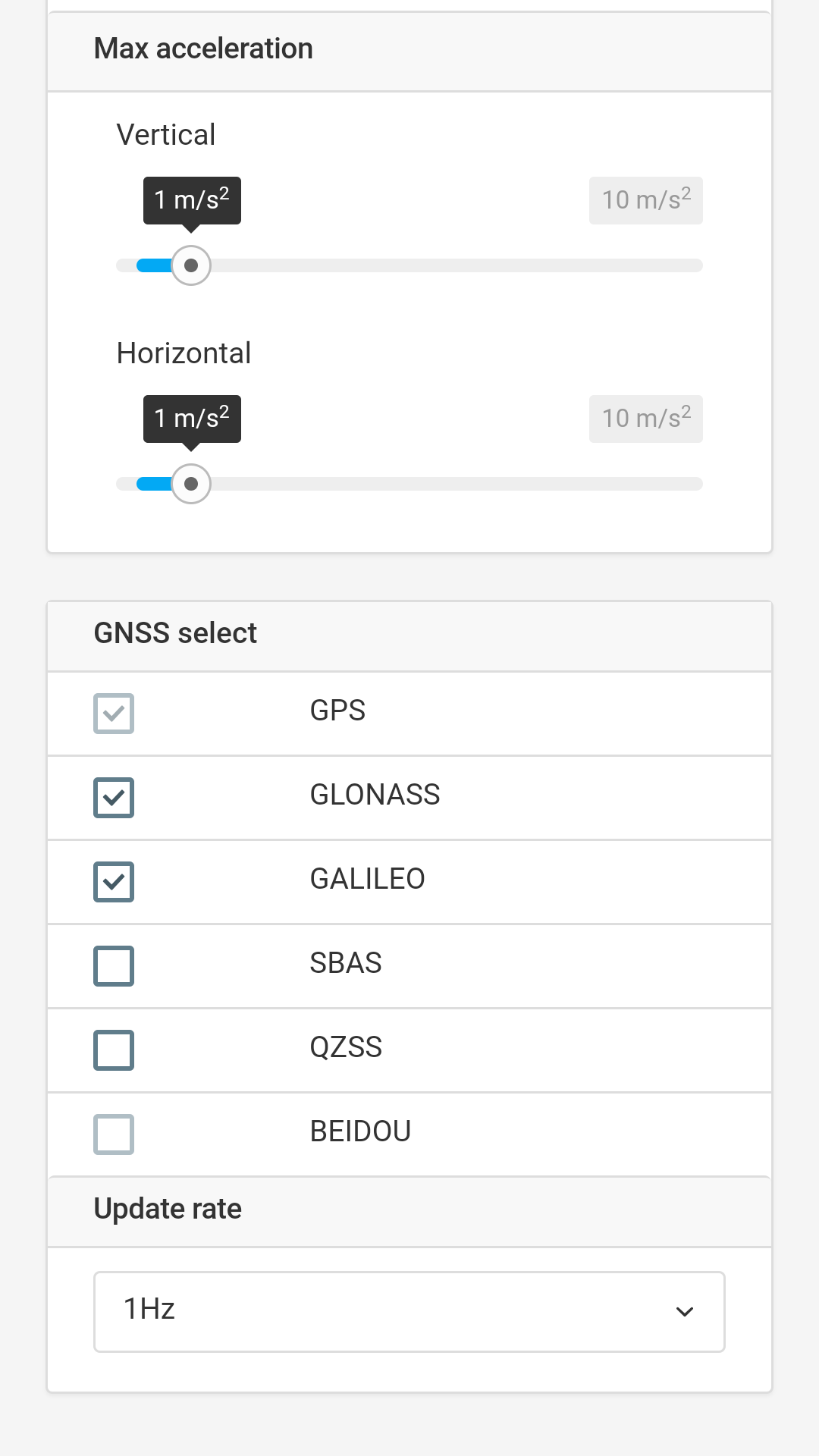
For systems on both base and rover use: GPS, GLONASS, GALILEO, SBAS at 5Hz.
Overal setup proces:
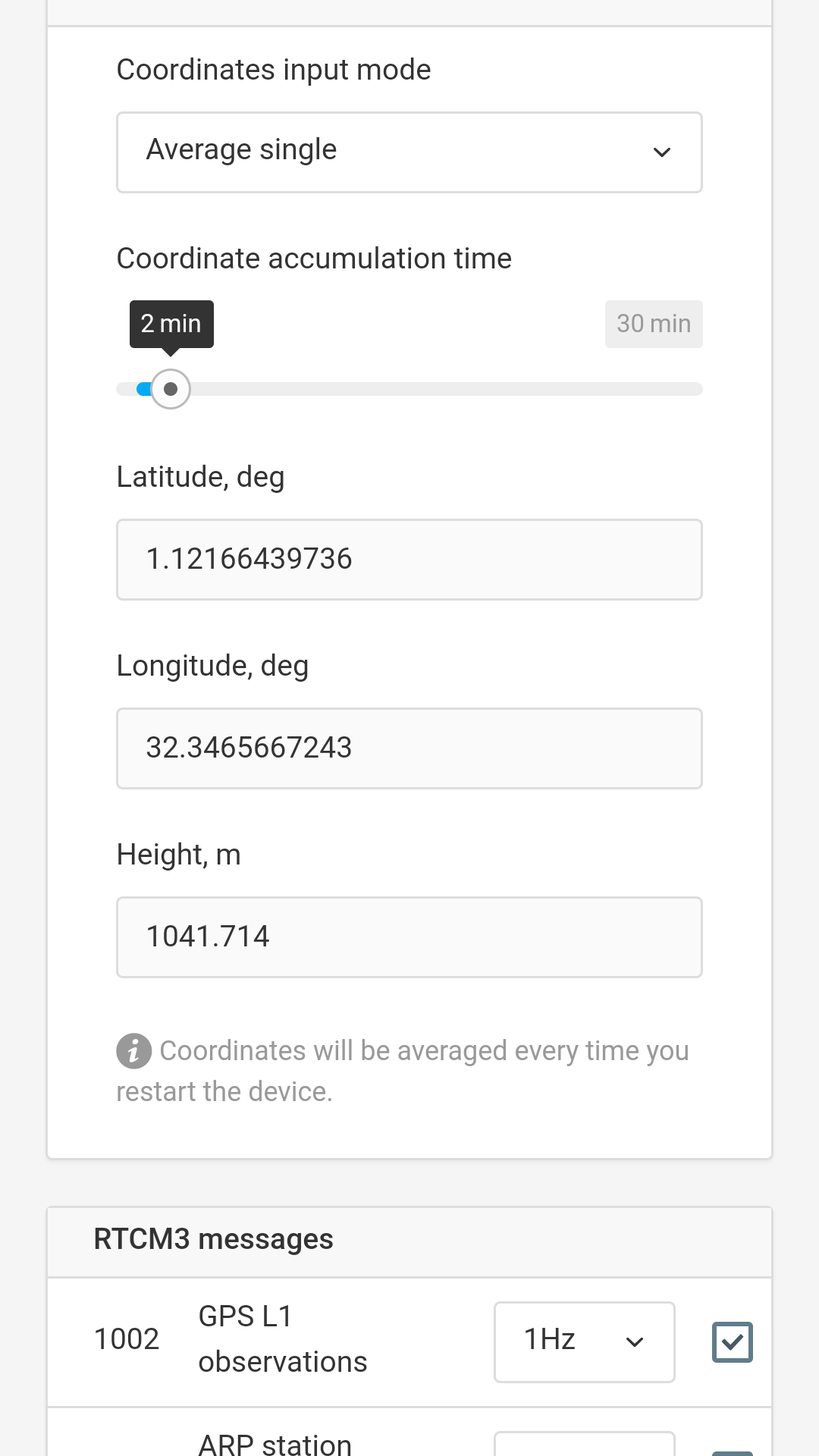
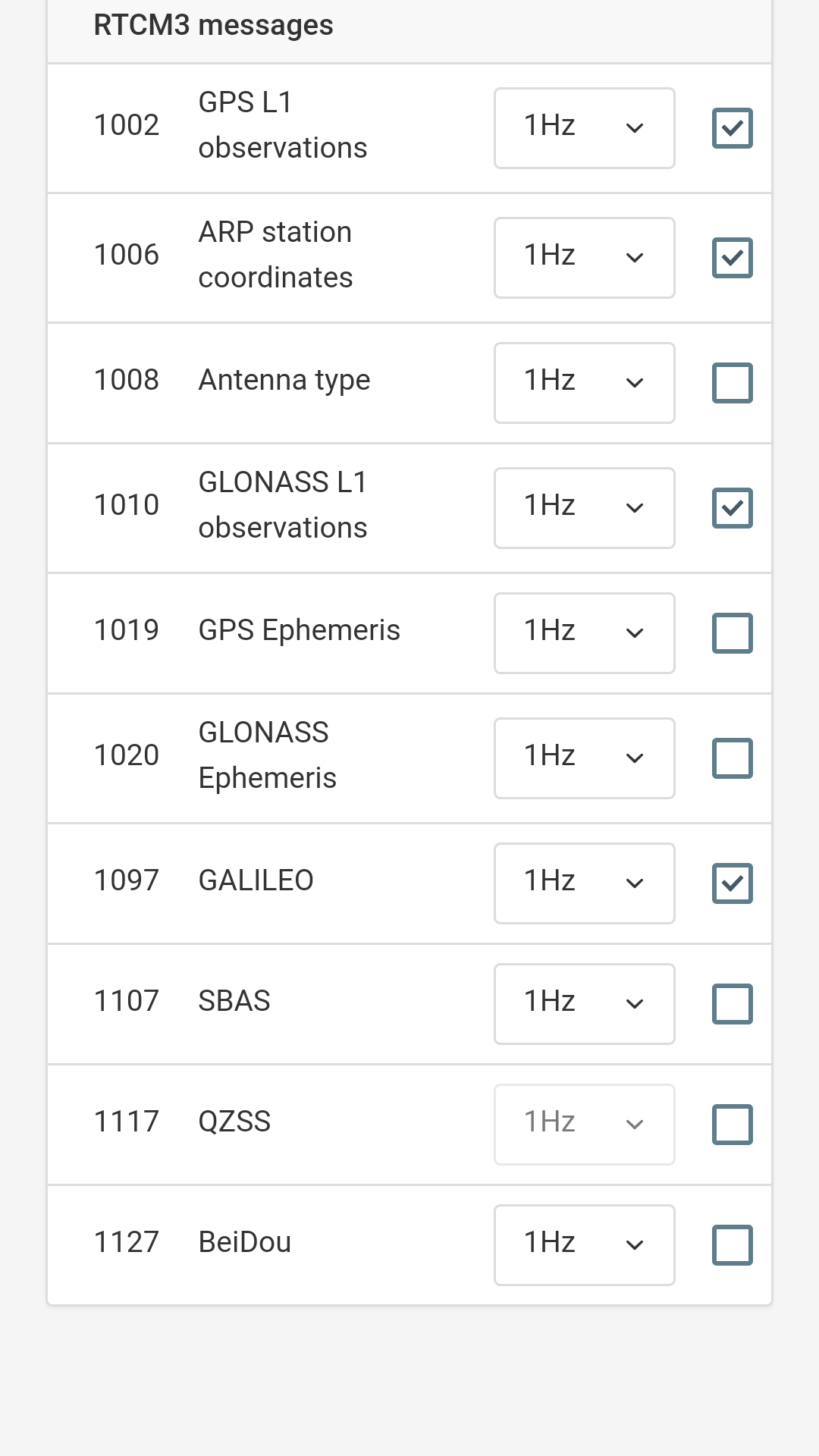
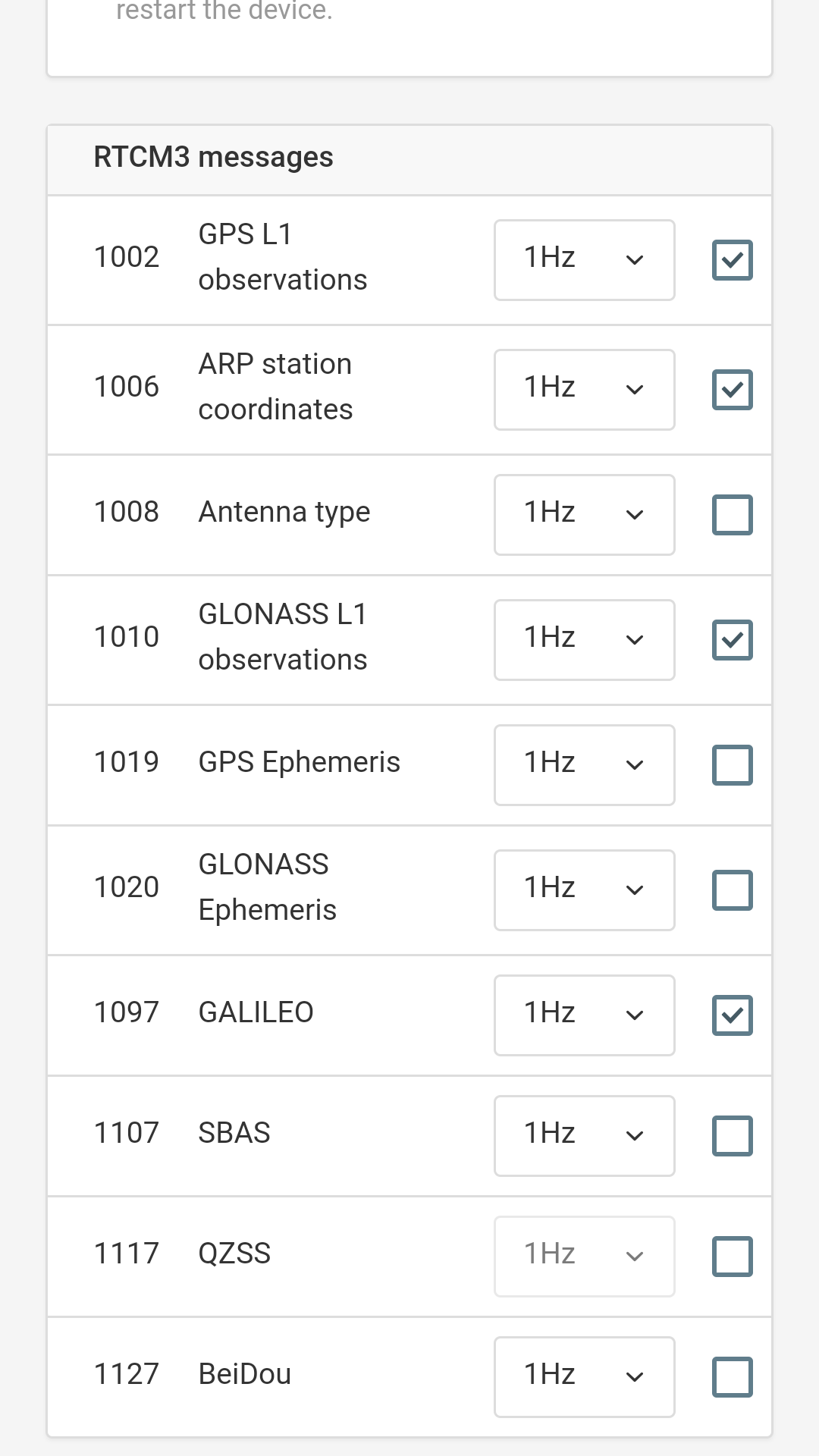
Connect to base with ReachView, open base mode and set it to transmit at desired frequency and power. Select RTCM3 messages you want to use, typically: 1 Hz 1002(GPS), 0.5 Hz 1010(GLONASS), 0.5 Hz 1097(Galileo), 0.1 Hz 1006(base position). Set base position to average single. This way your base will average position every time you turn it on. After position is averaged it will start to transmit corrections.
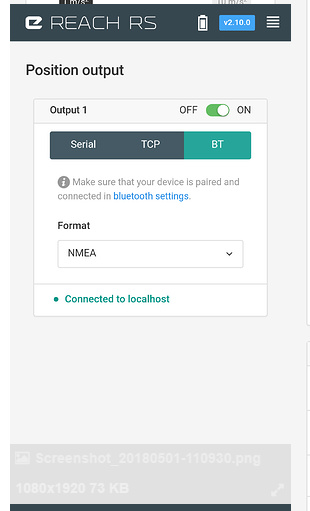
Connect to rover with ReachView, open correction input and make frequency and rate settings match ones on the base. Set position output to Bluetooth.
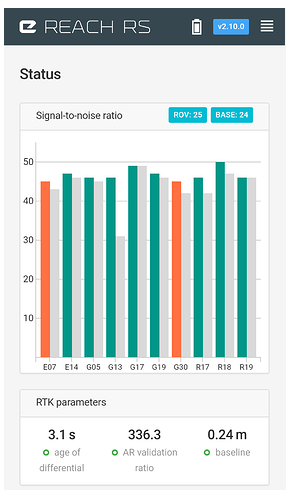
Check in ReachView status on the rover that you are getting corrections, they will be shown as grey bars on the GPS signal chart.
Now you can pair your controller with SurvCE to rover Reach RS and start working.
Thank you for your previous message to me. It was a great help and I did manged to connect Reach RS rover to my controller and SurvCE.
The only thing that does not seem right at the moment, is the fact that SurvCE is running very slow the moment one connect with Bluetooth to Reach RS Rover. What I mean by slow, the software runs slow and allot of times it will just freezes up and hang.
This is very problematic, specially when I need to do stake out work, like a line stake out. The software take for every to give me n new possession reading.
I am running Carlson SurvCE Version 5.06 on a CHC LT30 Field Controller.
I have used the LT30 Field controller very successfully in the past on my CHC x91 Base and Rover with absolutely no problems.
There must be a solution for this, seeing that I am hoping that it is just a setting in Survce that I need to change.
Your help in this matter will be highly appreciated.
I have only seen your request now, seeing that I need to do line stakeout work again using Reach Base and Rover with Calrson SurveCE Latest version.
Please see attached screenshots of my settings on base and rover.
The problem that I am having is that when trying to stake out a line or point is, that the SurveCE Software is lagging the hole time. It also does freeze up sometime. The problem also is that I am getting delayed position readings the hole time. That makes it near impossible to find the position.
Please see attached Screenshots for Base Setup and Rover, the first 7 photos are base setup and the rest is for the Rover Setup.
Hope you are doing well. Im not getting any reply from Emild Support team so you are my last resort for help.
I had my Reach RS Base and Rover working fine through Survce for a while. But then one of my employees made changes to the setup settings.
And now I just cant get the setup right again. At this point I am so confused that I have no clue anymore.
Do you maybe have the correct step by step setup to localize on a know point and the rest of the setup for the base and rover to work in RTK mode. I am busy doing line stakeout work.
I am so desperate that I am more than willing to pay you for your time. Any screen shots or something will be a great help.
Hope you are doing well. Im not getting any reply from Emild Support team so you are my last resort for help.
I had my Reach RS Base and Rover working fine through Survce for a while. But then one of my employees made changes to the setup settings.
And now I just cant get the setup right again. At this point I am so confused that I have no clue anymore.
Do you maybe have the correct step by step setup to localize on a know point and the rest of the setup for the base and rover to work in RTK mode. I am busy doing line stakeout work.
I am so desperate that I am more than willing to pay you for your time. Any screen shots or something will be a great help.
Sure. Let’s have a look. I see some funny things in your settings. (If I’m reading them correctly.)
First of all I want to make sure of the following.
You have base and rover.
a) Base is Reach RS -yes/no
b) Rover is Reach RS - yes/no
You want to connect to your data collector by
a)bluetooth
b) wired
i-usb
iii-serial
You are sending position from rover by nmea?
Could you send a post with base setting screen shots and rover screen shots clearly separated. I know you did the first 7 from the base but just resend them on separate posts or something. It’s just making it hard for me to see and I’m getting confused. Thanks.
Base Station
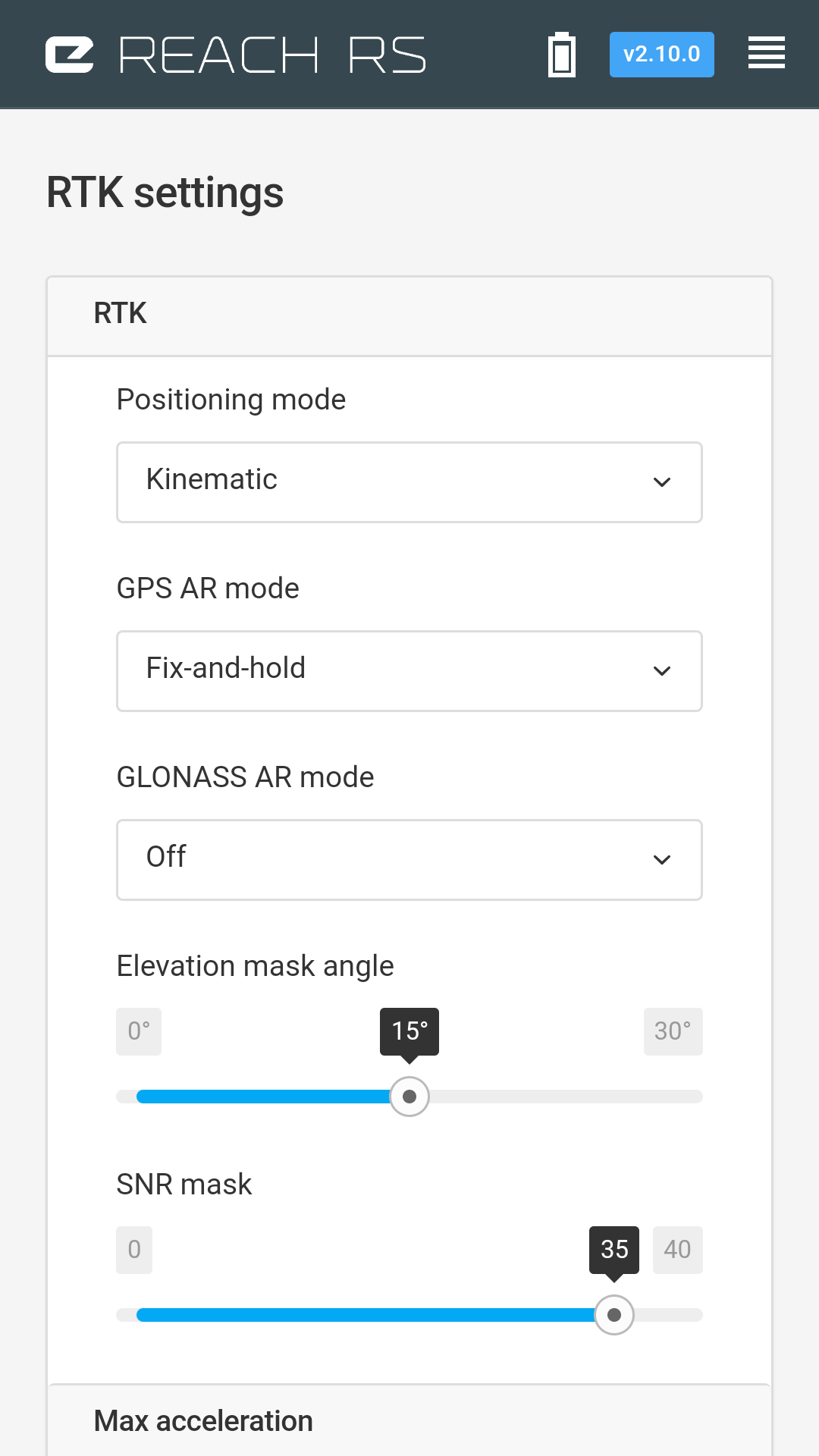
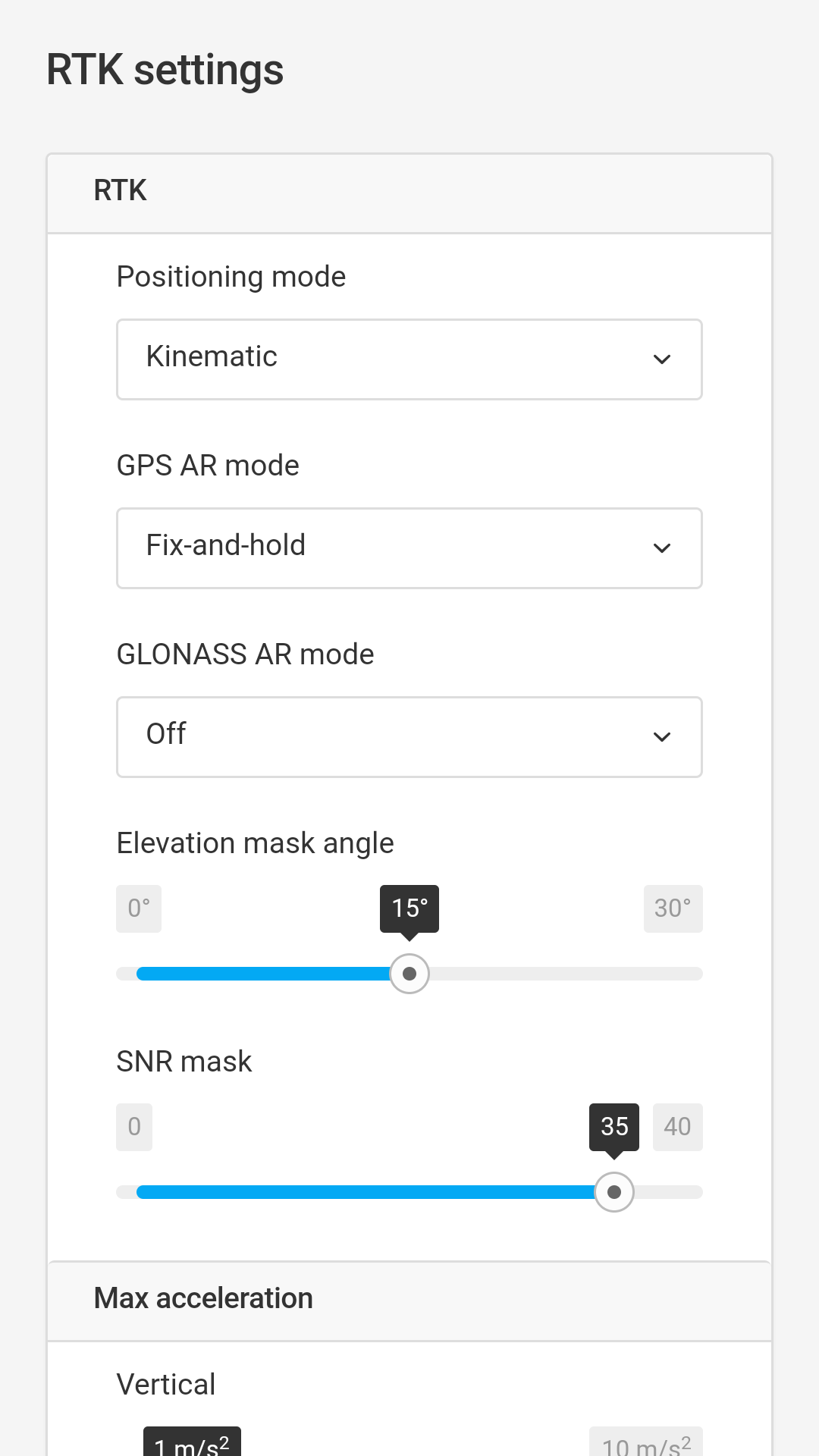
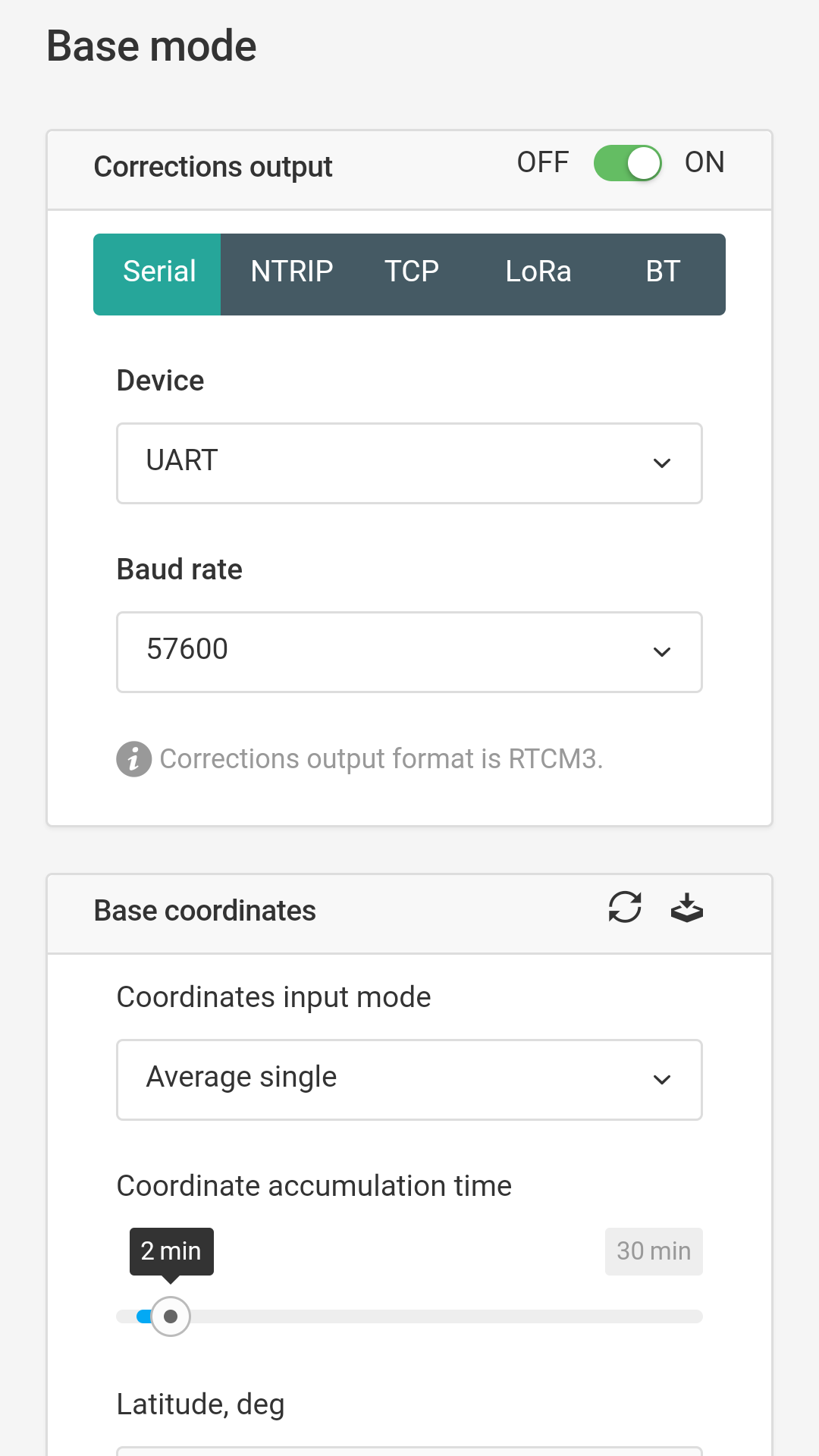
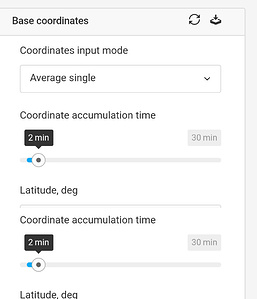
This page shows me that you have a fixed solution on your base station - If this is actually a screenshot from your base station. This is not necessary. Your base station is using “average single” to determine its position and does not need to be kinematic.
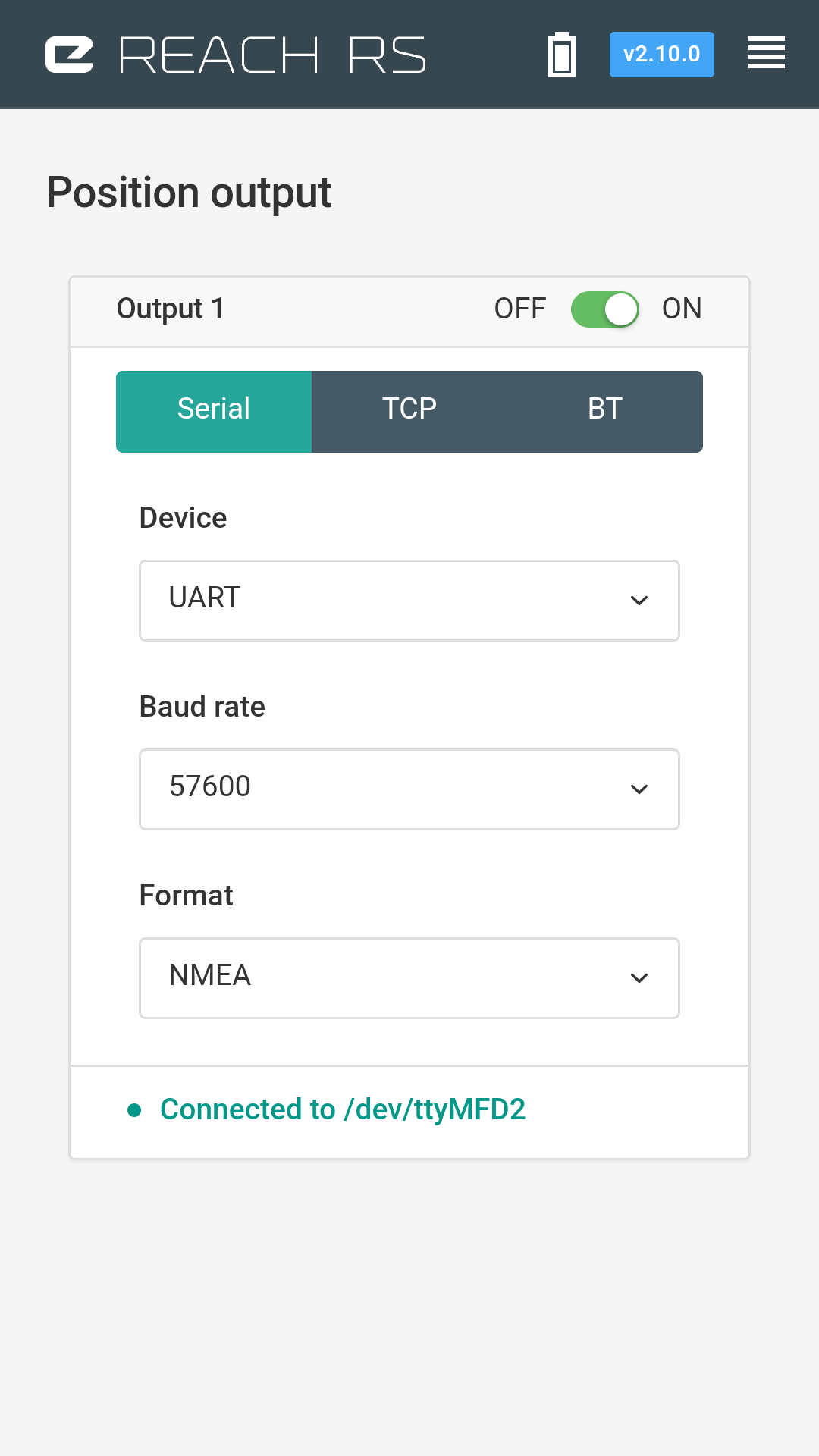
Your base station does not need to output its position to anyone. Turn this off.
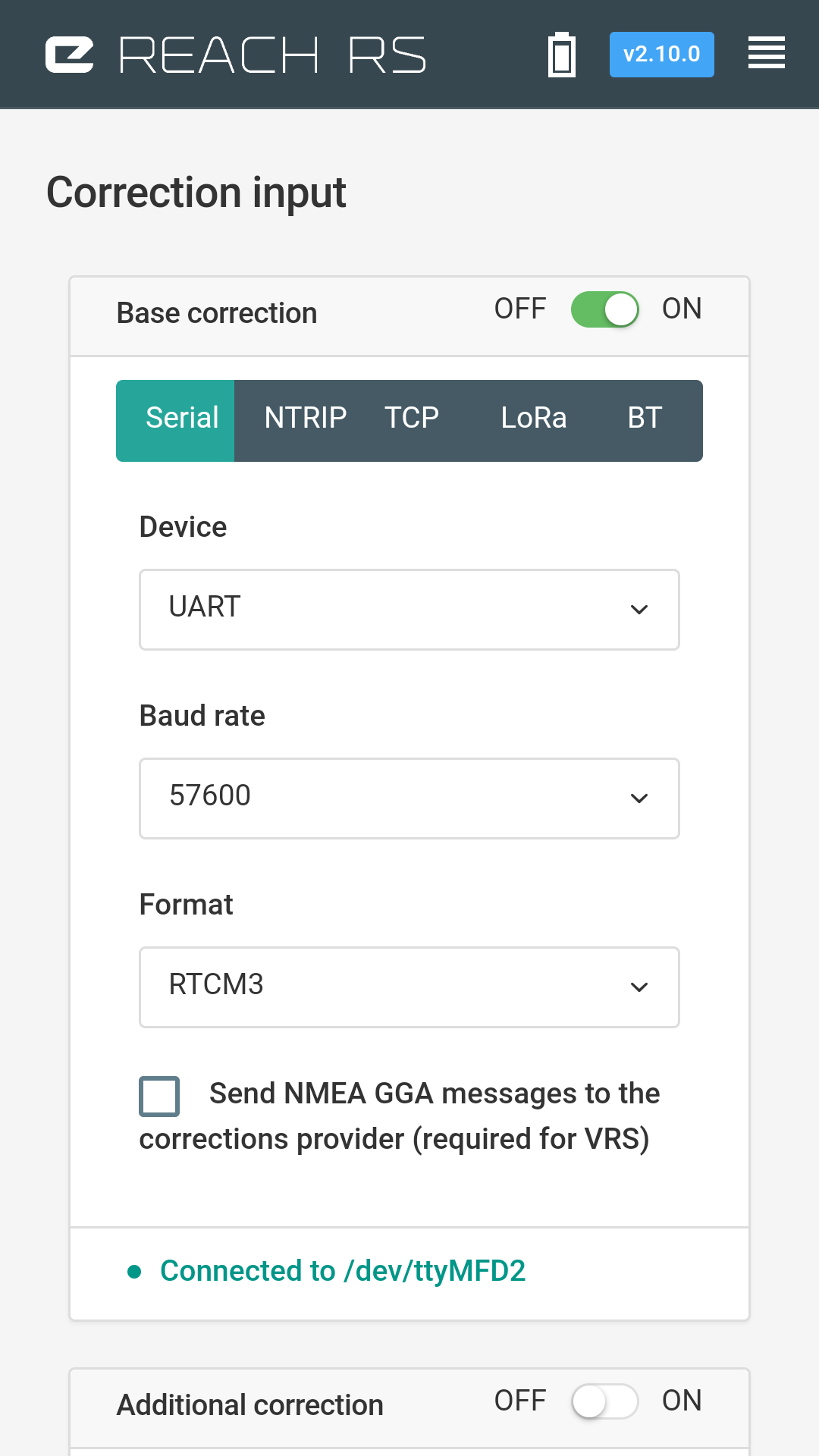
This is why you have a fixed solution at your base station. Your base station does not need correction input. Turn this off.
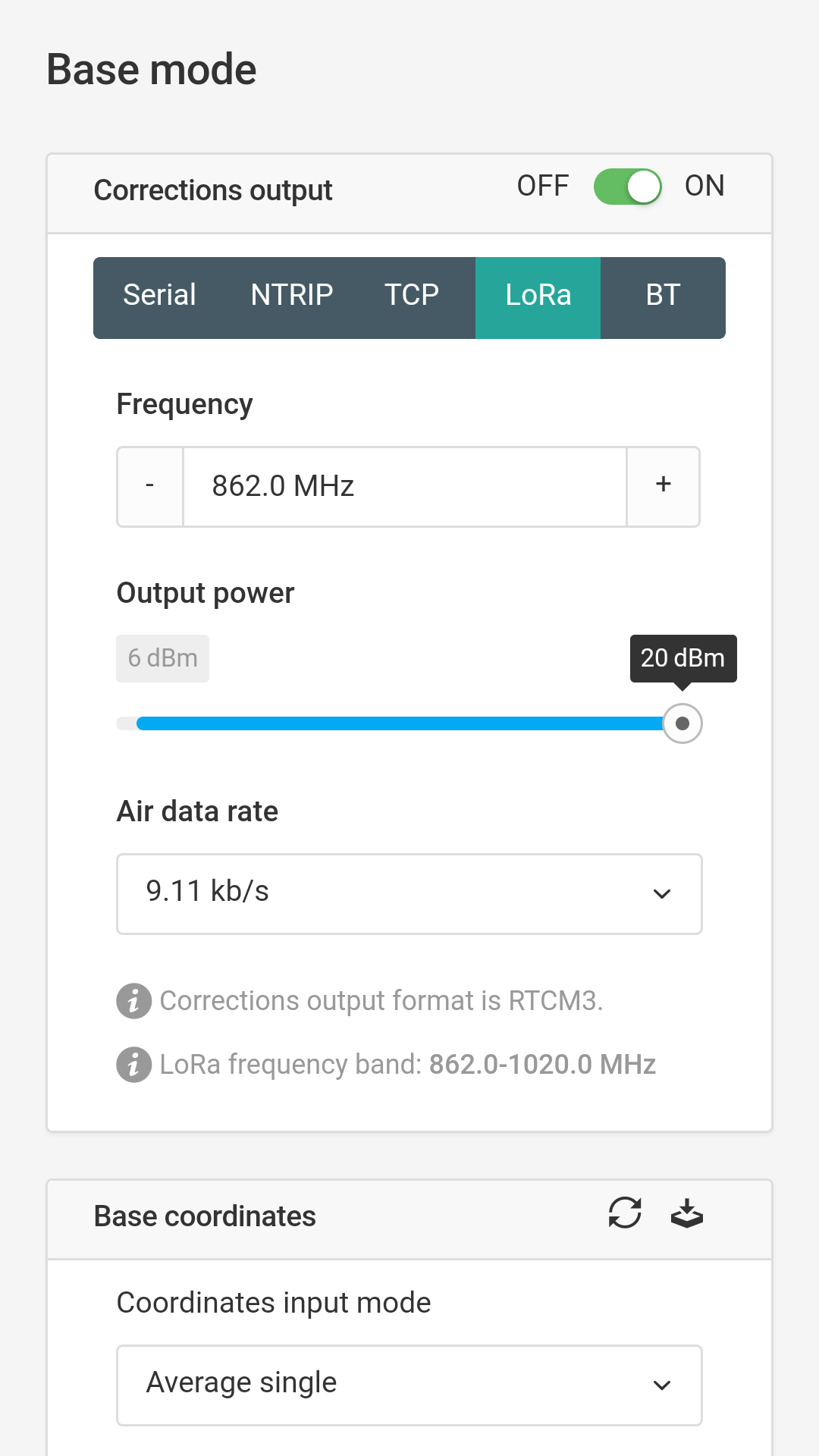
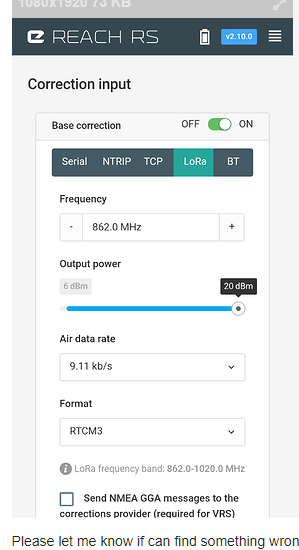
This is the only job your base station has. It is on. If you have two Reach RS you probably want to use LoRa.
This should be set to LoRa with the radio settings matching your Rover.
I am assuming this screen is right and that you want to use “single average”. If you want to test your system, then follow these directions for the base. I’ll send the rover settings in another post.
You have base and rover.
a) Base is Reach RS -yes/no (YES)
b) Rover is Reach RS - yes/no (YES)
You want to connect to your data collector by
a)bluetooth (YES) Calson SurvCE
b) wired
i-usb
iii-serial
You are sending position from rover by nmea? (That that is Correct)
This is the screen that determines how the base sends information to the rover. They do not talk back and forth.The rover just listens.
It should be ON. It should be set to LoRa with the settings matching the base station LoRa settings.
This is for when your Reach RS is acting as a base station. On your Rover, turn it OFF.
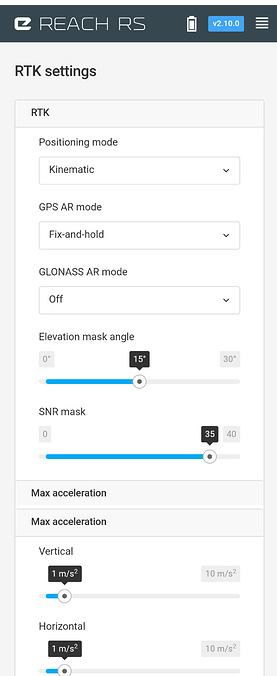
It doesn’t look like this screen is causing the problem. If you’re using Glonass, you could turn glonass AR ON, but that’s not the issue here yet, I’m sure.
Please start with this. Then, once you have a “fixed” solution on your rover, we will look into the connection with Carlson. I’m sure it will all be fine once you change these settings.
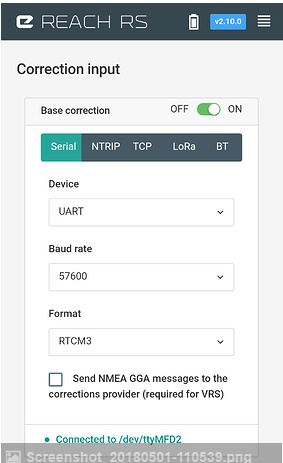
Yes, that is part of it. But please follow the rest of the directions. You had correction input-base correction set to serial on the rover. It needs to be LoRa.
Also on the base you had base mode set to serial- It should be LoRa as well.
Good luck. Glad to help.
It also looks like your Carlson Surv was getting its fixed solution from the base station position output over bluetooth.
It should of course be getting it from your rover, NOT your base station.
I didn’t see a screen shot of that page on your rover but please set
POSITION output on your ROVER to ON by bluetooth. Then pair your rover and your logger. delete the bluetooth connection on your base station to avoid future misconnections.











{kind=link}