I have installed last release 2.23.8 which has Rtk performance improvement.
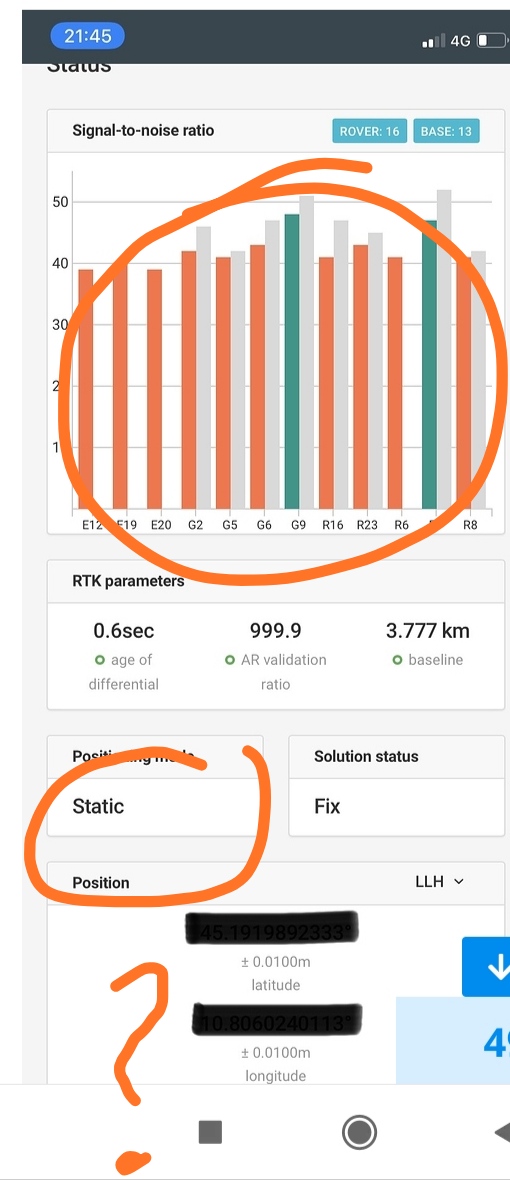
If you look at the attachments looks a bit too much improvement .
Same day,same point, different hour and 39cm of discrepancy.
I guess to have a real fix point with only two gps good signal is almost impossible.
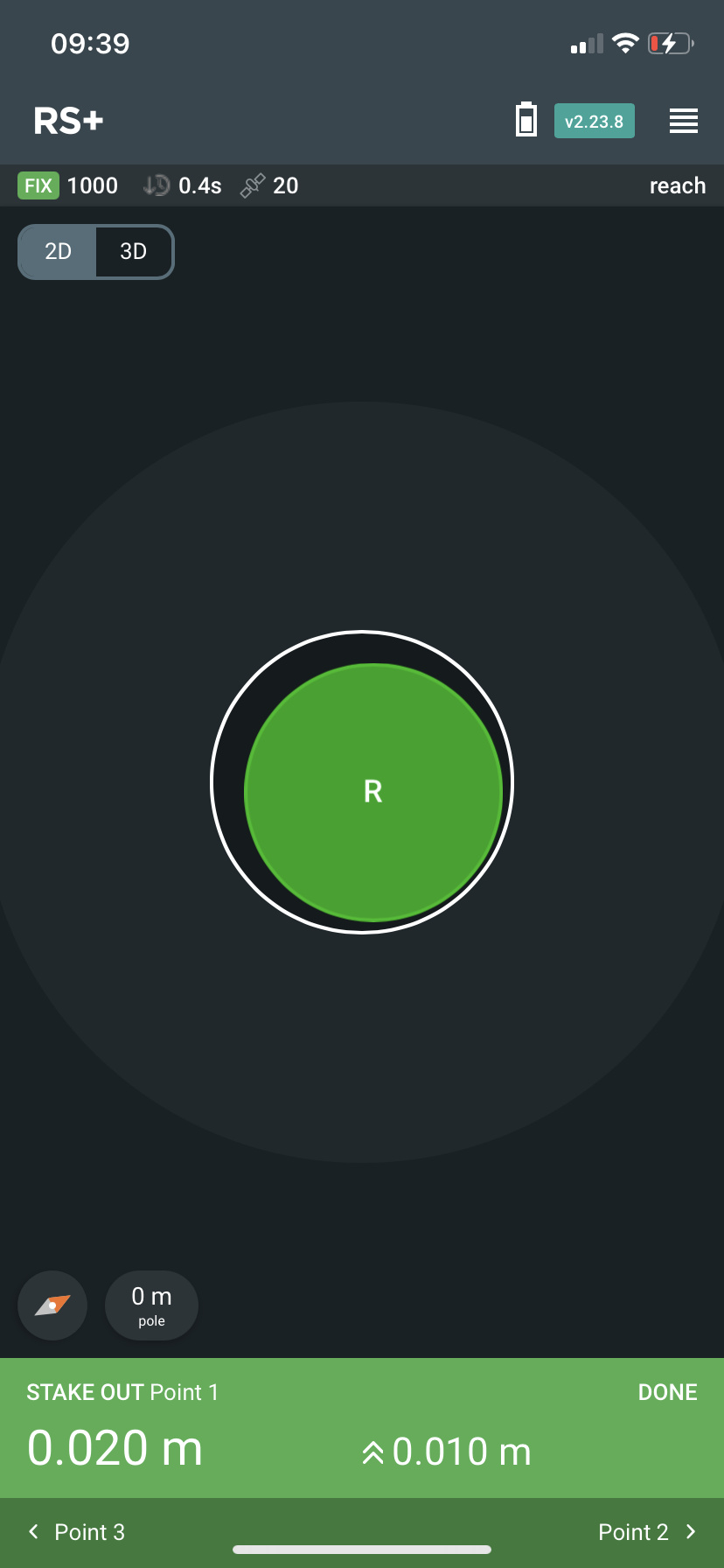
This is what I like to see.
Today 2 cm discrepancy.
How it possible to avoid situation like the previous measurement?
Ok you can see it from number of satellites but maybe next time look al fine but the coordinates are away
Hello david.
I do not understand you well, what is your problem ?. Can you explain it better? Is calculating coordinates for a fixed point in RTK with differences of 39 cm this latest version ?. Did you have that problem with previous versions?
All you said is correct.
Never happend to me have an easy fix position in the location where I measure the point.
With new firmware I have almost all the time fix position but with only 2 gps corrected by NTRIP and the consequent is to have large error between measurement of the same point.
Today in the morning I tried and everything was fine, but I am bit scare to have situation like the first post where it says fix position and in reality was not for sure
Yes it s a rover corrected by NTRIP ( nearest base).
That’s what I said…it can not be possible to have a fix solution in the first picture.
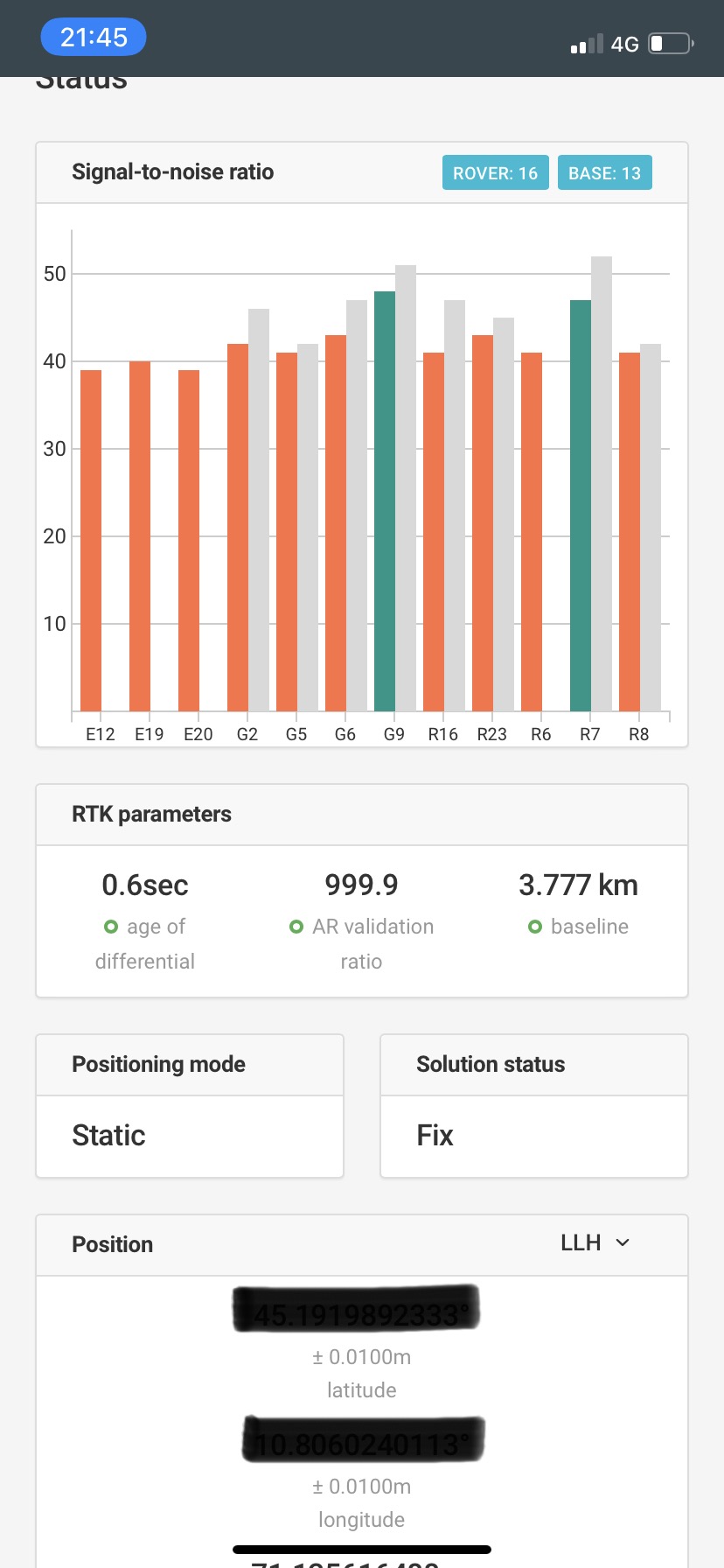
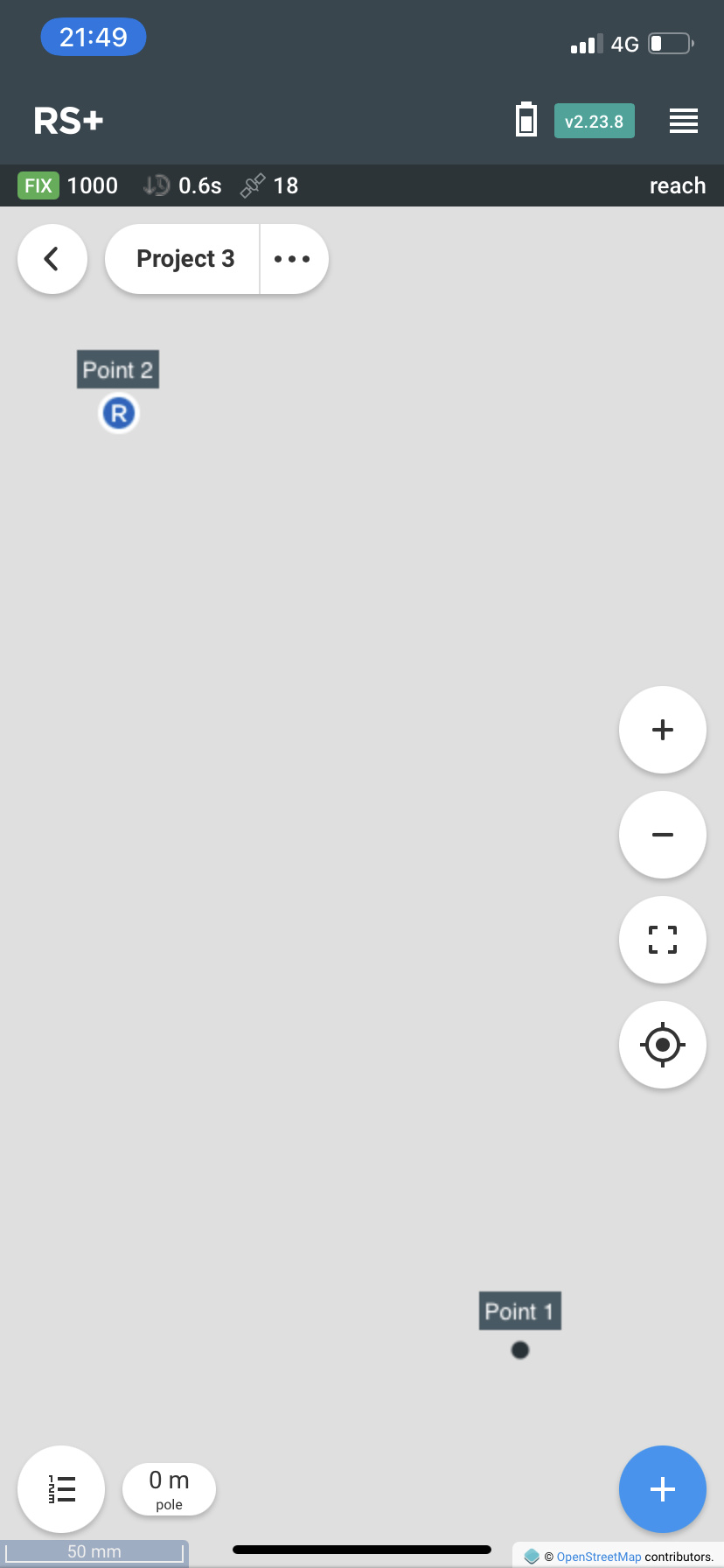
The rover is set up as static and fix and hold because I need just to take 1 point.
Also right now.
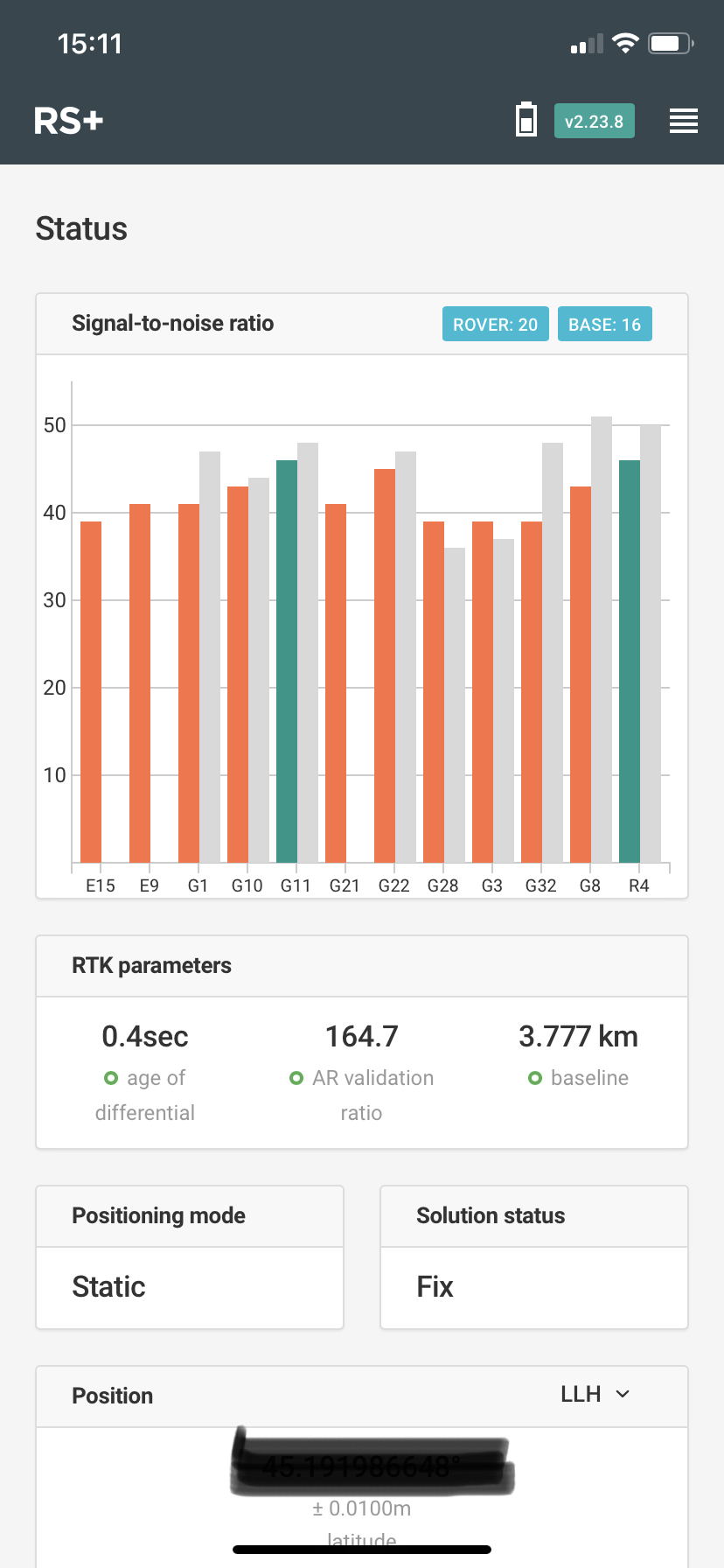
2 gps and FIX Solution
Sorry to say but I don’t trust in this device anymore.
Imagine to deliver a project with wrong coordinates.
No no no
Something is wrong
Hello David,
Try to post-process and you will check if a coordinates are correct.
Also Multipath can cause false fix do not forget that it is a single frequency receiver and it is sensitive to multpath effects.
So If possible, avoid locations of stations near large flat surfaces such as buildings and large signs…and receive corrections from as many satellites as possible.
But in the image above I see that corrections are obtained from 9 Satellites minimum and not 2 Satellites, note that orange mean bad signal (when there are obstacles like trees or buildings etc…) and green are good ones.
In general yes but it depends on the configuration of you rover, also with a good configuration of your rover and in a good conditions you obtain a centimetric accuracy like a multi-frequency receiver.
Otherwise if you think you will work most of the time in difficult conditions it is better to opt for a multi-frequency receiver or use a total station.
Agree…single and multiband have same accuracy if fix solution is achieved. Of course single band needs more time and better sky view.
But in that example in my option is a software bug. If only 2 satellites are consistent to be corrected the software has to downgrade to float solution.
I fully understand what you mean but I think that this is the problem of all single- frequency receivers because the solution that the firmware must provide consists in differentiating between a signal coming directly from the satellite and another reflected by a construction or a surface in the case of errors generated by the multipath effect for example.
@Davide1288@Zinou Are you trying to measure under trees or buildings? I would do ppk, you do not have a good solution. if there are trees I would use total station.zinou has experience and his advice is very useful. do a continuous postprocessing with rtklib and see the results. Rtk static doesn’t sound good to me
May I ask you to share the logs from your receiver? It’d be great to check the standard ones:
the raw data log
the position log
the base correction log
the photos of the environment
This will help me check the observational quality, the solution during the RTK mission and the quality of the data you receive from the base.
Do I understand correctly that you measure the same physical point on different days and get 39 cm error?
To correctly calculate the position, the rover needs to see at least 4 satellites.
According to your screenshot, your rover and base simultaneously see more than four satellites. You can check in your RTK Settings which satellites are excluded from the calculations. As a default, these are the ones with SNR lower than 35. You have several satellites, for example, G10, G8, G32, which SNR is above 35.
Depending on you environment, you can get false fixes on rare occasions.
Especially on the single-frequency receivers such as the RS+, being close to walls and other objects that reflect radio-signals (metal walls are the worst) is poison (For these tasks the RS2 is much better suited).
That is why it recommended to have clear sky-view down to at least 30 degrees above the horizon.
Looking at your SNR-bars, I think you are either under slight cover, or near to a wall?