So i connected the emlid reach to my pixhawk following the APM integration doc and the status remain single on the ReachView app. But when i connect my pixhawk to mission planner i got the gps status of my first gps to 4 and the gps status 2 on 0.
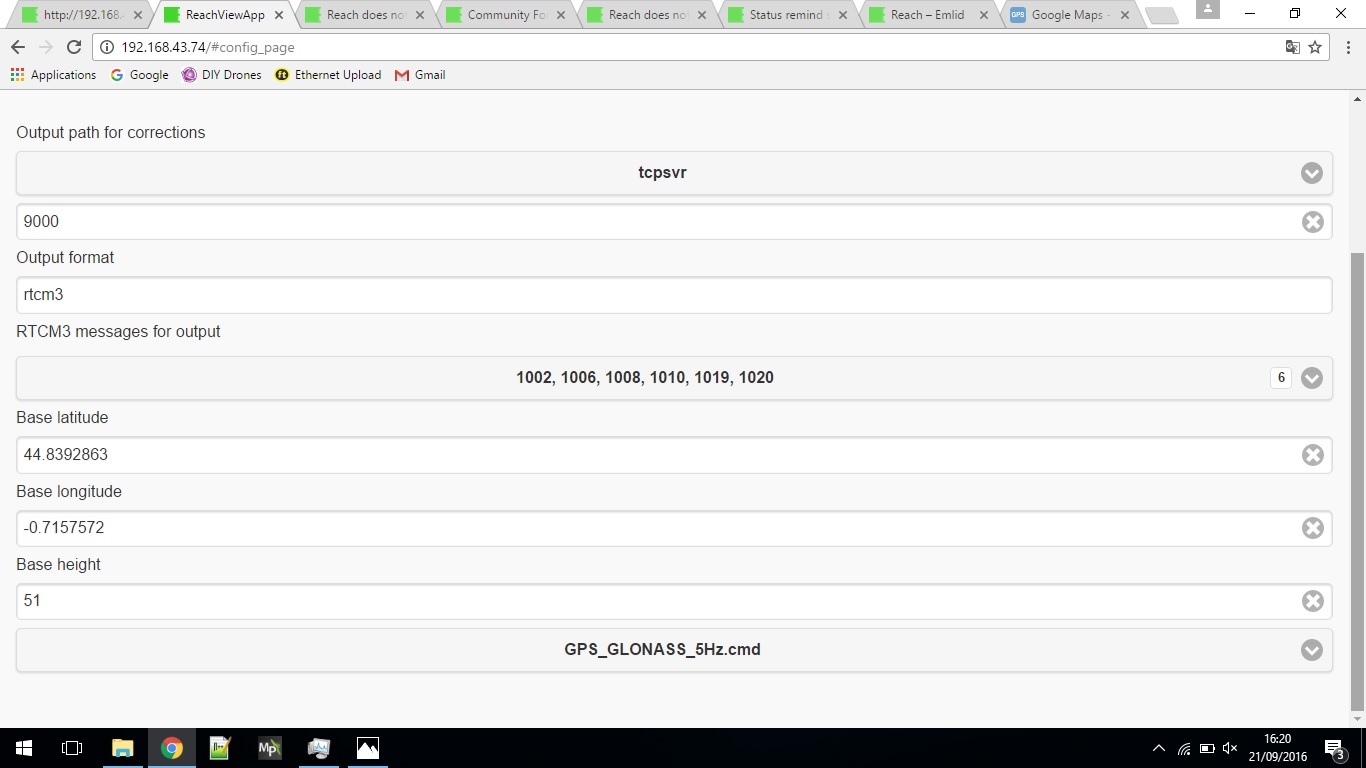
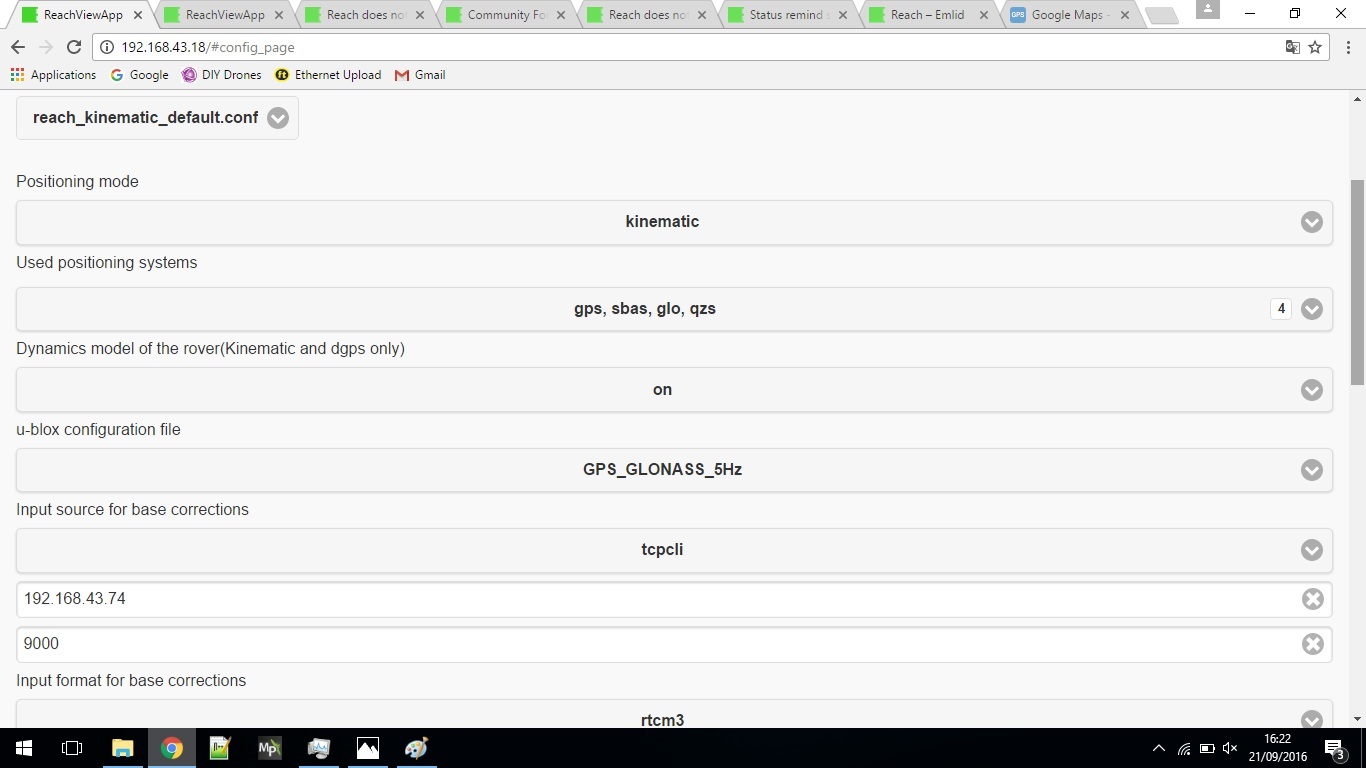
I give you my configuration on the base and the rover so you can see if the problem is coming from there.
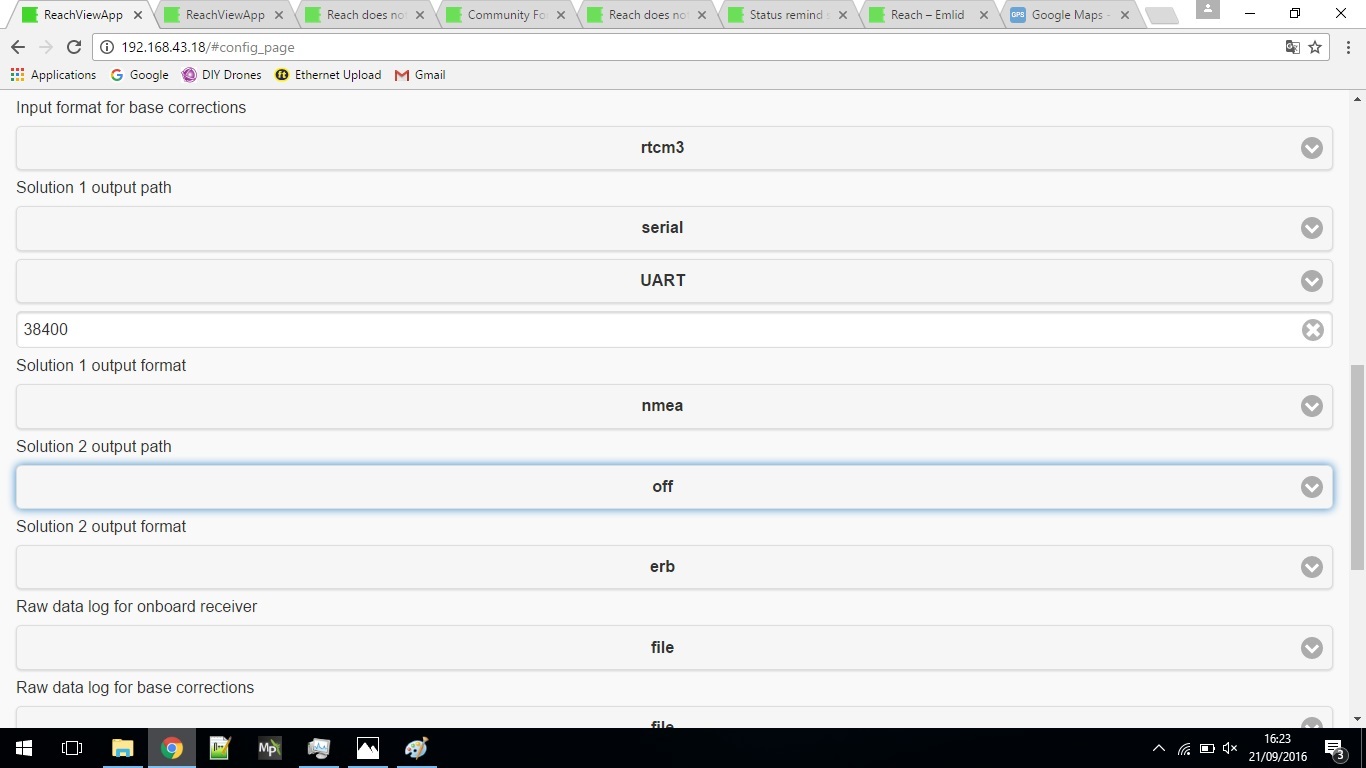
I have flashed the firmware 3.3.3 erb and i have tried the output format in erb and nmea and nothing changes.
In the pixhawk parameters i have set the protocol of the serial 4 on 5 for GPS. I have checked and Gps inject is on 1, Gps Type 2 is on 1 and it’s the same for autoswitch.
Really appreciate that your post is highly detailed!
The output format must be ERB and please check that Serial4 has baudrate set to 38400 (or set baudrate on Reach serial to what you have on PIxhawk). As you are using Wi-Fi for corrections, there is no need to use inject. It is only used for transferring corrections through telemetry radios.
If you will be migrating your setup to corrections inject, please do not forget to lower the rate on the base:
I already have the baudrate of Serial4 set to 38400 and the format is ERB. I will try the minimal settings for the base correction stream and i’ll post the results.
I still have some questions because the final point of the project is to make it work only with radios. I don’t want to use the tcp server to inject corrections and i would like to know if this is possible. ( Get corrections via 3DR radios without mission planner. )