Detailed issue description. How does observed behavior differ from the expected one?
-(See screen shots attached)
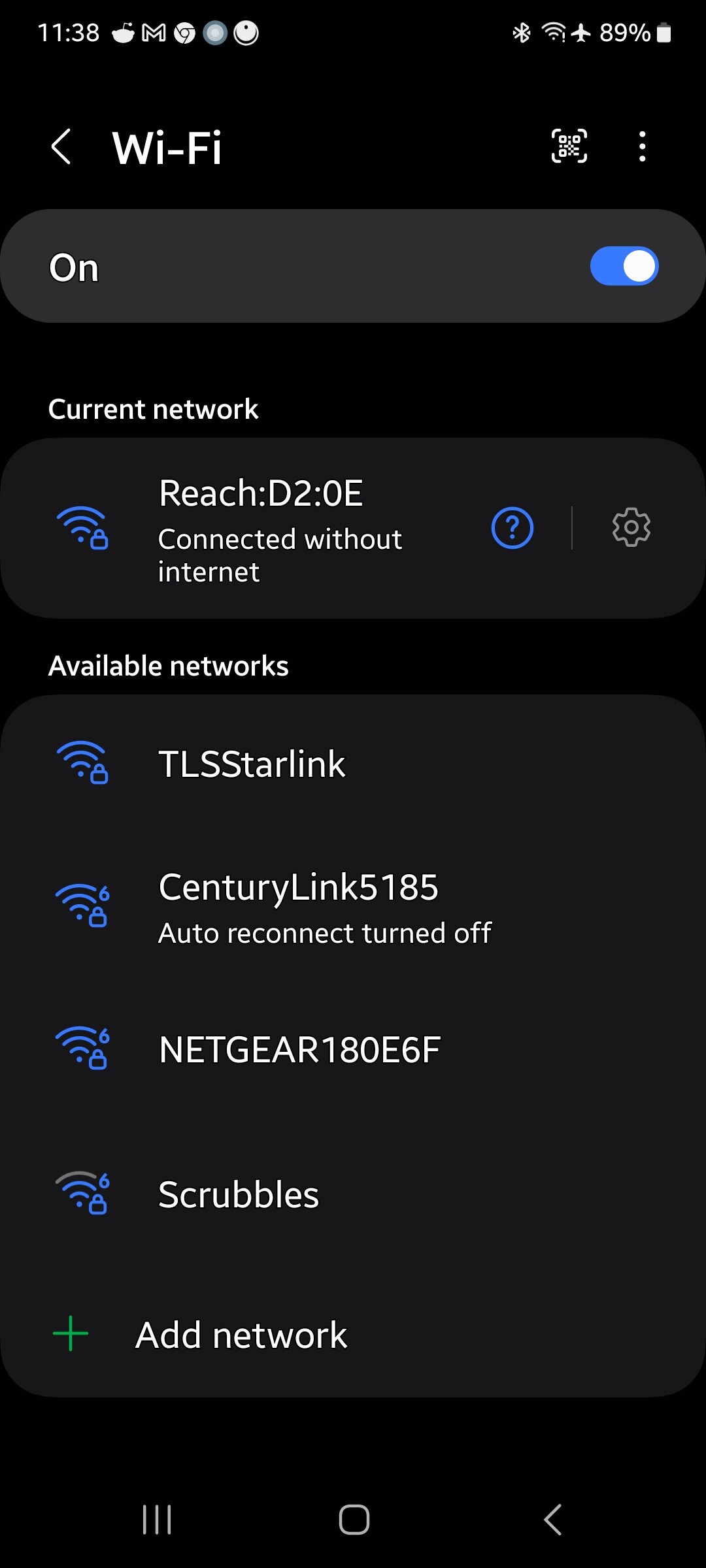
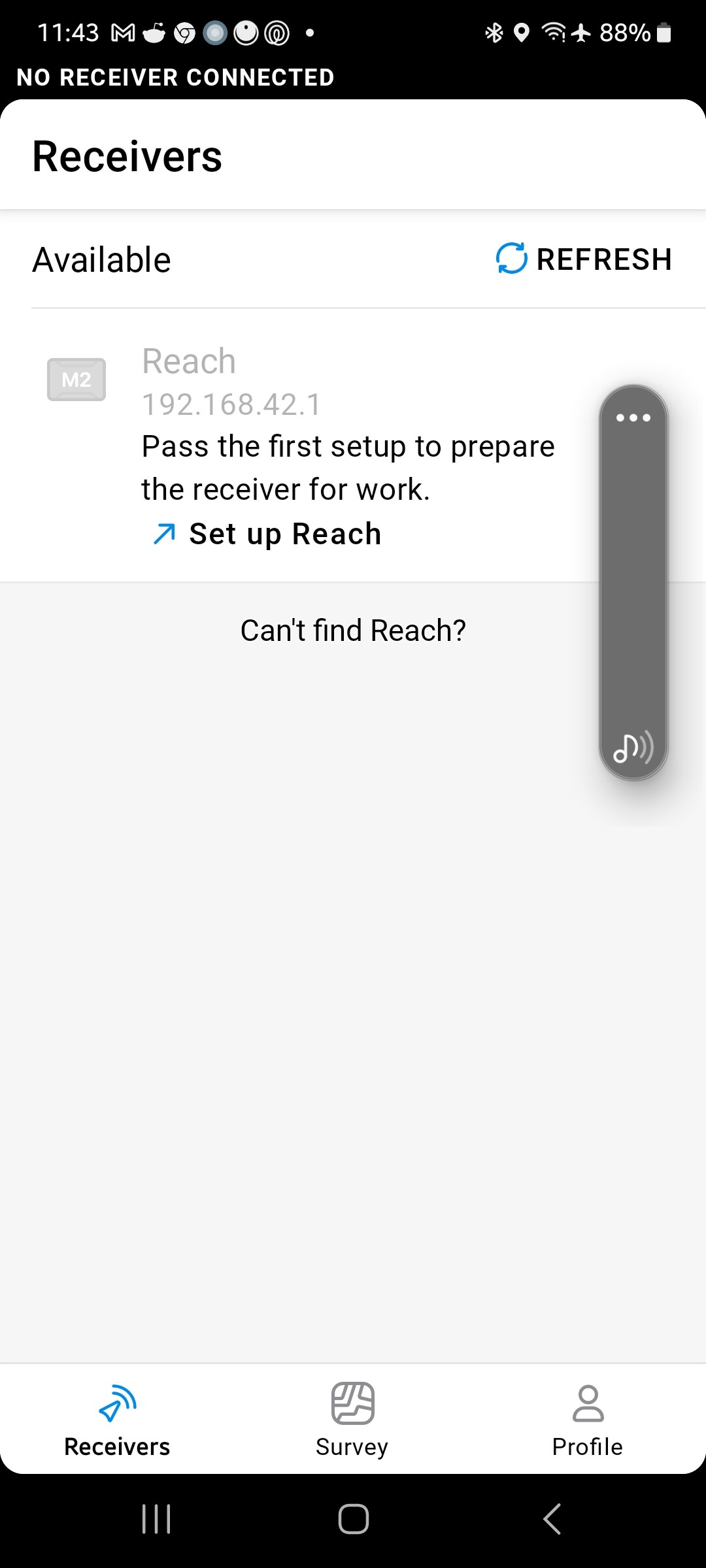
-When connecting my M2 for the first time I can connect to the M2 and it shows in Emlid Flow.
-When I select it, it indicates that it needs to be set up so I select setup.
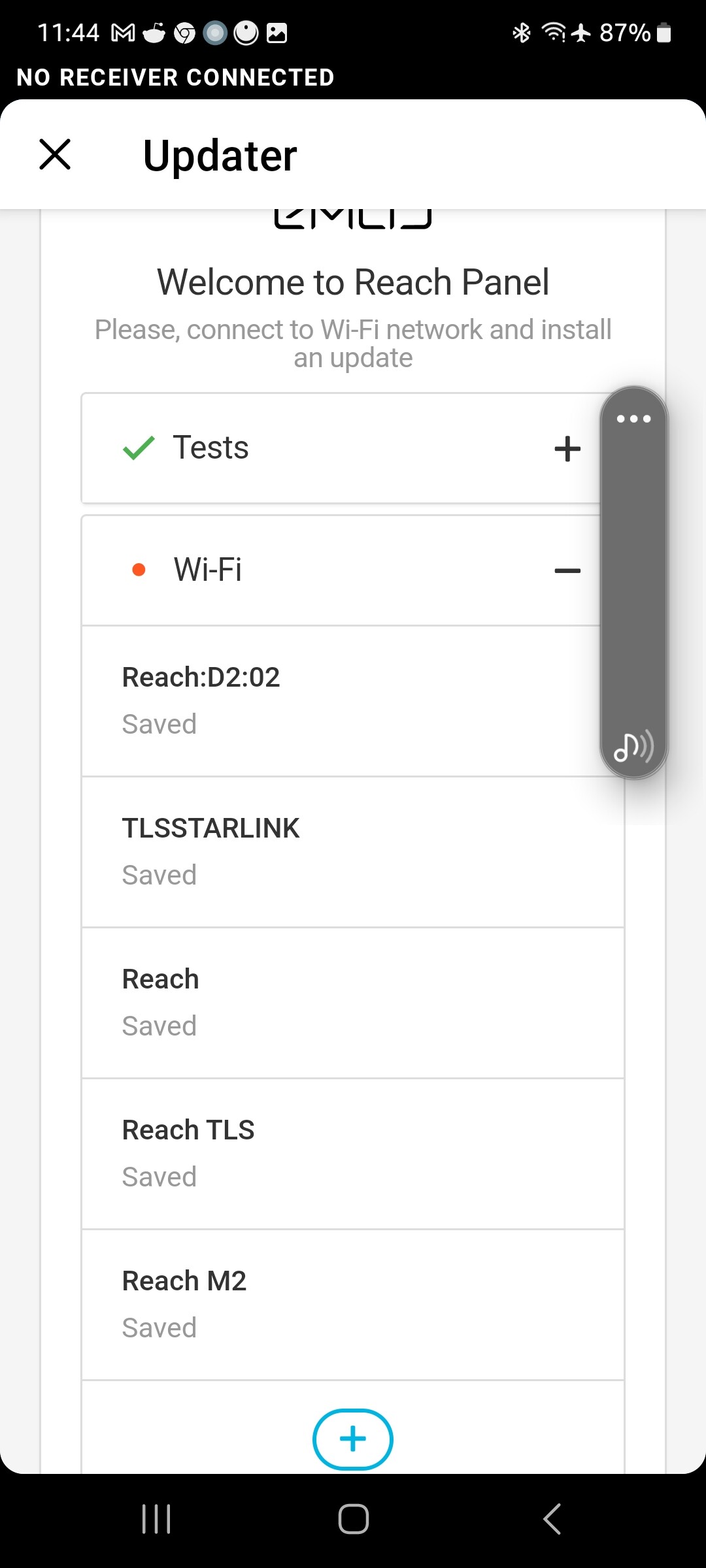
-When I do it goes to the updater screen and indicates “Tests Passed” but no wifi.
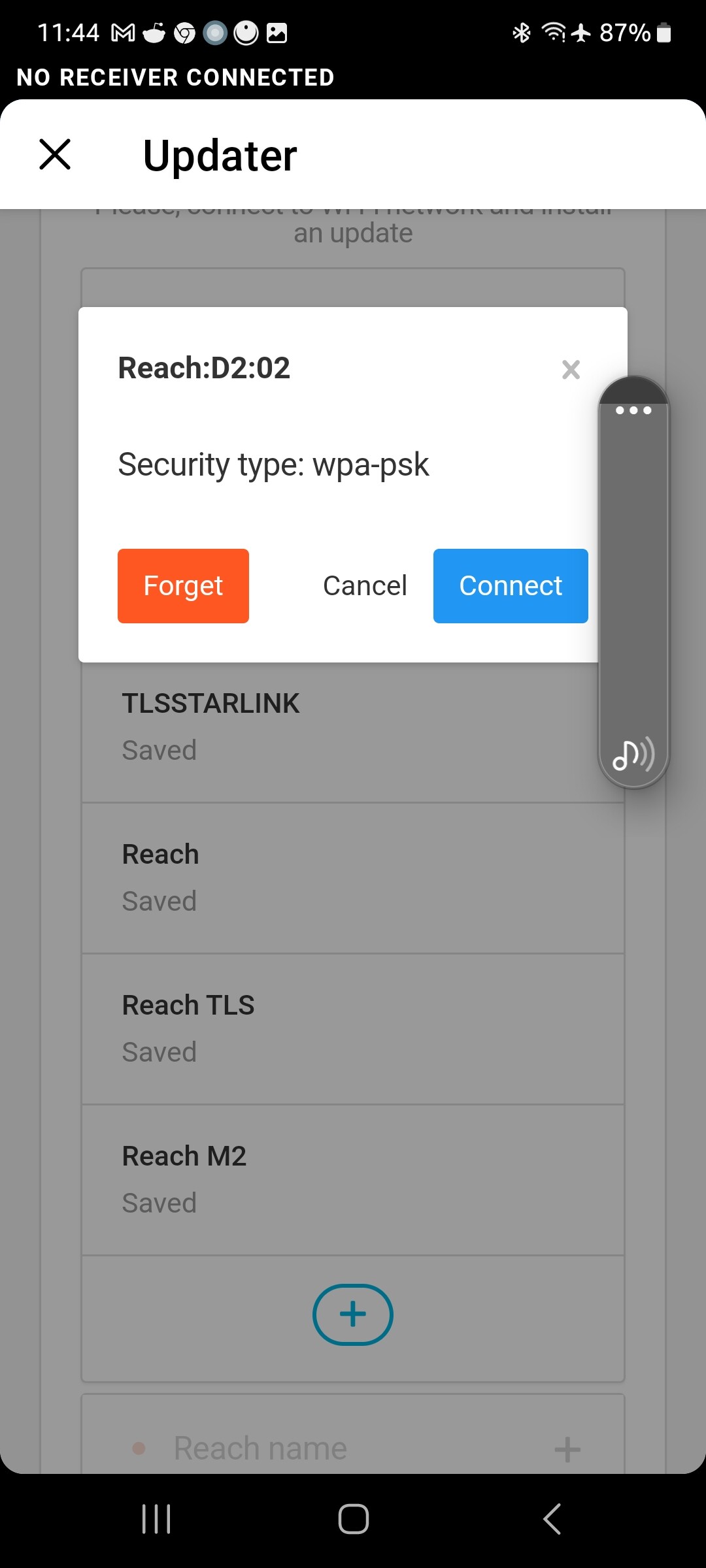
-When I attempt to add any wifi network, it drops the already connected M2 and gives an error. This happens even if all other networks are set to not re-connect. The phone has mobile data off.
When Reach connects to a Wi-Fi network at this step, your mobile phone will indeed drop the connection, as they’re not on the same network anymore. To continue, let’s connect your mobile phone to this network, too. It’ll let you connect to the receiver again in Emlid Flow.
When you tapped on a Wi-Fi network, how did the network LED react?
Also, if the connection is still not working, let’s try to connect to your unit via Reach Panel and try to set it up there.
Welcome to the forum.
What accessories do you have for the M2?
External GNSS antenna?
LoRa radio + antenna?
Read the manual carefully, i think i remember setting that you shouldn’t power up the unit without an antenna connected.
You should find a few options on the chat for setting up a base station.
I bought the M2 and GNSS antennae with cable to use with a kit on my DJI P4P drone. Since then I have decided against using this setup on a regular basis and wanted to take advantage of the unit for regular rtk surveying. I can use the RS2 as a base, and will purchase the needed radios if I can get a workable solution with the M2. If I want to use the M2 as a rover, how do I go about setting it up? Do I need a different antennae?
Hey Thornton,
In regular survey use, the RS2 might be better built (housing and all) as the rover.
For the M2, I would recommend getting a housing such as:
which comes with a high-gain GNSS antenna.
You will also need:
so the 2 units can communicate via LoRa RTK
The M2 can also be used as a permanent Base station and transmit corrections via the free NTRIP caster service that Emlid provides.
Is there a document or paper that goes through setting this up? Do I need two of the
Lora radios? how does it connect to the RS2, or does that unit have a Lora built in?
Sorry for all the basic questions. I will do some research myself, but as I have you on line wanted to ask.
We have access to our own PPK service (WRSN) for getting static coordinates on a base point. Does Emild have it’s own service akin to OPUS?
If I remember correctly OPUS is for Static post-processing results?
Emlid offers a free NTRIP caster system that allows you to broadcast RTK corrections over the internet to your rover(s). I believe you are allowed up to 5 rovers for free. Above that you will have to purchase the “Pro” version. Similar to operating your own VRS.
SO since it’s Real-Time I would say it’s better than OPUS
I looked at the NTRIP Caster page and it does not mention using the RS2 receiver, only the RS2+. Can it work with the RS2 as the rover? I imagine it would as long as the android device has an internet connection through a broadband (cell) connection?
It’s a totally fine option to work in a base+rover setup using Reach M2 and Reach RS2. As Adrian also mentioned, a difference between the units is that Reach M2 doesn’t have the same protection, so it may be more extended to the conditions.
If you’d like to use LoRa to stream corrections, you need a LoRa antenna for the Reach RS2 and a LoRa radio for Reach M2.
If you have an Internet connection on your worksite, using Emlid Caster to stream corrections is also possible. Here’s our guide about connecting the units to the same mount point.
We don’t have such a service, but it’s possible to record logs with Reach receivers that can be updated to OPUS to obtain the coordinates for one particular point.
Please feel free to share any further questions or experience about working with this setup!