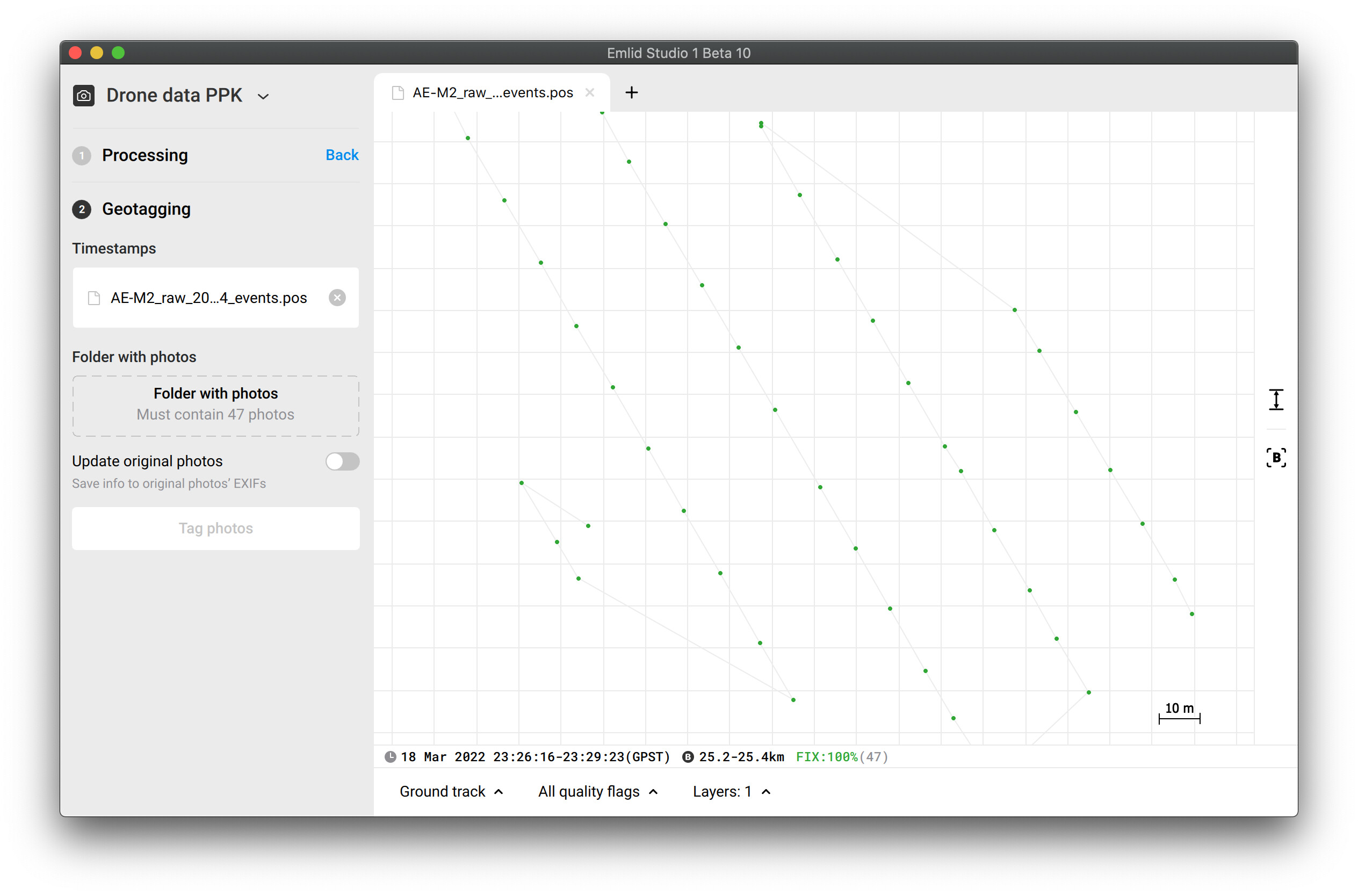
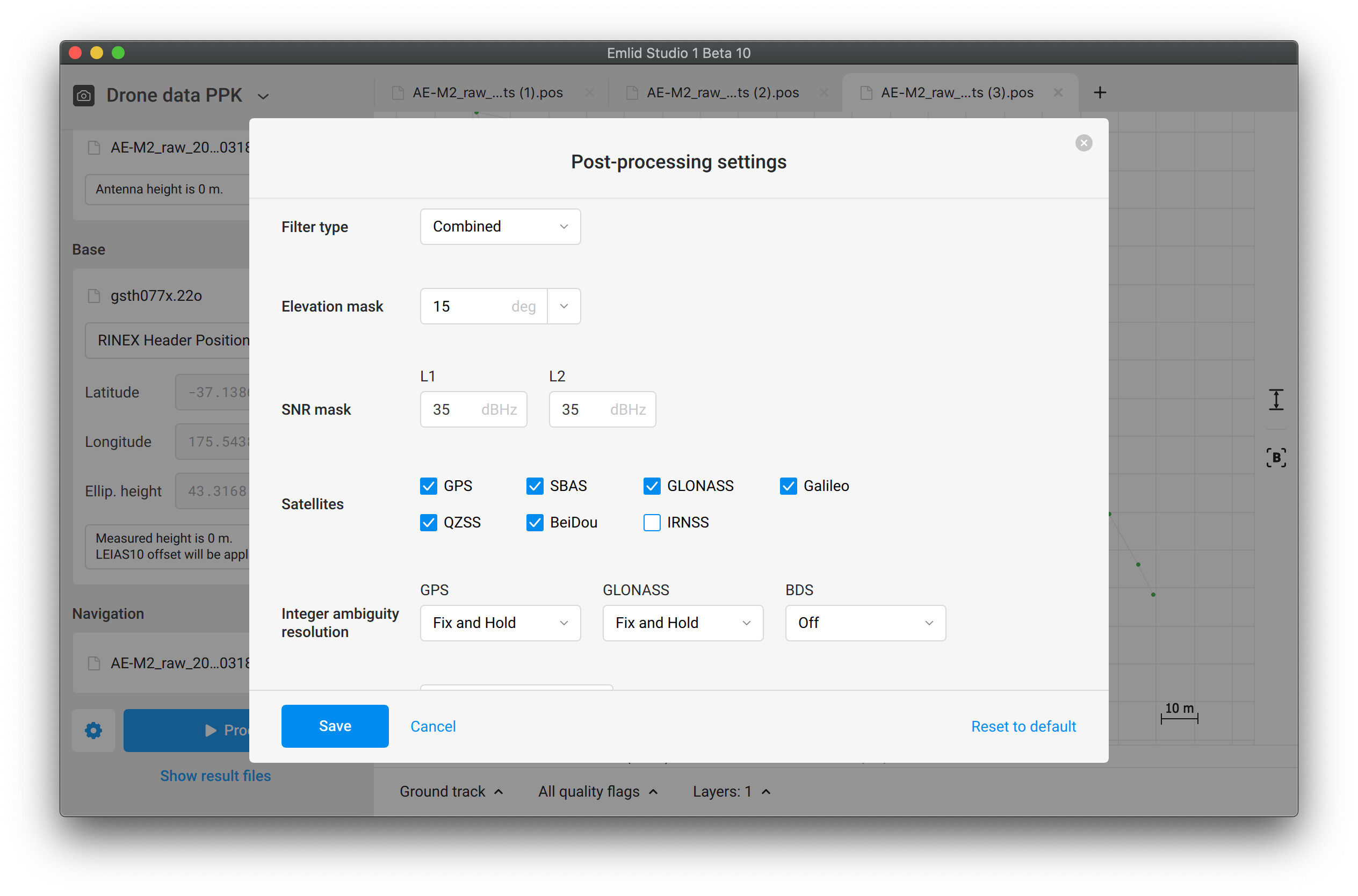
It looks like you still use the previous event.pos file, which was 100% in Float. I can reproduce the same issue with that file. But with correct settings, the solution is 100% Fix, and Emlid Studio asks for 47 photos:
GPS L2 signals are divided into L2C and L2P signals. L2P are legacy ones, and Reach doesn’t track them, it tracks L2C only. Raw data logs from LINZ contain L2P but not L2C. Also, Reach M2 raw data is noisy as it’s placed on the DJI, while Reach RS2 data is not. That’s why LINZ data is enough for Reach RS2 and not enough for Reach M2 in your case.
Thanks Svetlana,
So what do you think went wrong in the workflow exactly?
I ran the Drone PPK processing (using the settings discussed above) and then just moved down the options in Emlid Studio to GeoTag (presumably using the output I had just generated).
Should I have run these as separate operations? (i.e. done the processing > closed down Emlid Studio > then re-run the Geotagging with the pos file separately?
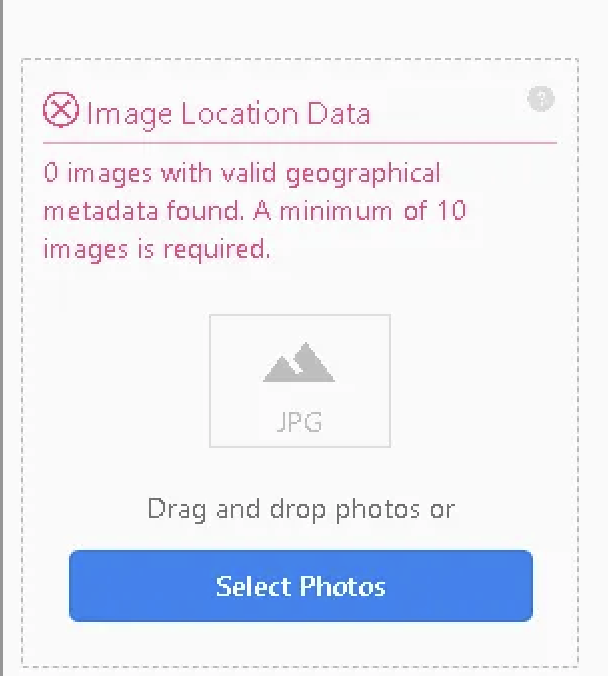
I had a friend try running the previous photos (the ones that did have GPS data in them tagged by Emlid Studio) in Drone Deploy but it wouldn’t accept them… it didn’t recognise any of the GPS data (even though it appeared in the image properties in Apple Preview, and worked when doing it manually in Maps Made Easy).
I’ll ask him to try with these new images to see if it’s any different but my concern is that Emlid studio is doing something strange with the metadata and when I go to do this for a client with a 160Ha property it’s going to be a huge headache.
So the most recent attempt (using the .pos file you provided) asked for 47 photos and I provided the last 47 (ignoring the first two in the folder) and it worked - Drone Deploy could import them, and recognise the location metadata.
If I understand, in future I should be able to import my UBX log file from the Reach M2 and my corresponding LINZ data file into Emlid Studio, process the points (hopefully get a fix solution) and then using the .pos file created by this process, import the photos that the drone took and GeoTag. (This is what I tried to do the first time).
Where I guess I need to be careful is in checking that the ‘events’ that the Reach M2 records corresponds to the number of photos.
As the flight and photo taking is automated, this raises the question around optimal settings, (particularly flight speed) to ensure the Reach M2 position is as good as can be expected.
But I still dont know why Emlid studio removed GPS data from some images… I’m not sure what happened the first time I did it, and why it asked for 50 images when there was only 48 (not including the one taken from the ground).
I suspect that there was some kind of mismatch between the Reach M2 log file and the photo count… but I don’t know why. This is the main thing that still confuses me… and reduces my confidence with PPK.
@ActionEcology What I could see is that LINZ are rinex with log every 30 Seconds, instead smartfix logs every 1 second. For flights with Drones PPK requests data every 1 second.
@svetlana.nikolenko I also got 47 events, but there are 48 photos. It seems to me that the drone at one point took two photos almost at the same instant, but the front LED of the phantom 4 Pro only lit up once (This is the way the photosensor of the metta or tuffing kit marks an event). That’s why there is an additional photo.
The 30 seconds interval also plays its part in the lack of data for processing. You’re right.
I think it’s a good note for Mettatech or Tuffwing users. But we can’t handle such things from Reach’s side as it’s a feature of this specific hardware setup.
Im having the same issue, Studio is removing my data and I cant get Dronedeploy to accept it. They are working on it now. It is hearting to know someone else is having the same issues.
I have an assumption that DroneDeploy needs coordinates in DMS format instead of DD. Have you tried that? You can configure the coordinates format in Emlid Studio settings.
When I started out last year I had enough going on without having to learn Pix4D and didnt try any other software. Dronedeploy was easy (I think of it as the Apple solution). I got a years subscription and it has been great, but I’m considering trying the perpetual licence of Pix4Dmapper at the end of the 12months.