I was wondering about the workflow for drone mapping with the M2 (via PPK) over NTRIP.
I am setting up my drone mapping platform (DJI Phantom 4 Pro V2.0 + Reach M2 + MettaTec PPK Kit), and was trying to understand the workflow. I have a Reach RS2, but it seems that when mapping, the corrections are ultimately going to be sourced from the NTRIP service (I think).
I have read the instructions, setup guides etc, but I still have two questions:
1. How do I set up the Reach M2 in regards to ‘Correction Input’. Do I leave it as ‘Serial’?
2. The service here in New Zealand (via LINZ) requires you submit your RINEX log (in version 2.11) and they send you back the corrections (as I understand it). So… does that mean I
a) set up the M2 to record RINEX logs in v2.11 and just send them to LINZ, OR
b) do I record raw logs, import them into Emlid Studio and then export them as v2.11 and send them off, OR
c) do I have to somehow get corrections from LINZ for the nearest COR station and import them into Emlid Studio? OR
d) Have I got this the wrong way around and I should use my Reach RS2 as a ‘base’ and set that up to record RAW logs for corrections… and use the two (raw) logs in Emlid Studio together? (Assuming the Reach RS2 has internet connection, which (if it doesn’t) I have to somehow get those NTRIP corrections right?
Shane, welcome to the Emlid community! There are many good folks here on the forum that are very helpful.
How do I set up the Reach M2 in regards to ‘Correction Input’. Do I leave it as ‘Serial’?
That is possible but you would have to also add a jetpack device on the drone so that the M2 had constant internet connection. There is a VERY lightweight Jetpack by Alcatel that is actually feasible to add on. But while it is very light, it is still more weight being added to the P4P and this is not the normal workflow for the Emlid M2 kits added to the Phantom 4.
Most people who are using the PPK kits for the Phantom 4 Pro are only doing PPK processing after the flight. So that means there is no NTRIP corrections as that only applies to RTK, not PPK.
In order to do PPK processing, a base is required. It sounds like you have an RS2 Unit as well so you are really all set up. You will setup your Base unit to log statically and then fly your Phantom 4 Pro with the M2 kit added on.
After the flight, there will be a two step process.
You will do PPK processing on your RS2 Base to get the PPK coordinates of your base unit. Now that you have the Post Processed coordinates of your base unit,
You will use your RS2 Base as the Reference (ie your personal CORS station) to do PPK processing on the M2 data.
If you use your RS2 as a Base (and I certainly would), then you can use the online service to process the Rinex File generate by the RS2. I have to believe that you can simply download the CORS file and do the processing in Emlid Studio. However, using LINZ is probably very similar to using OPUS in the United States. It is very easy, reliable, and quick for getting your Base Station PPK results of the Base Station.
Emlid Studio will handle all of the Processing (both the Base Unit and the M2 Device) and then you would have to update your photos exif data or generate a CSV file for processing in your photogrammetry software. That method is FREE and the link to that method has been posted here before by @michaelL . It now what I would call easy peazy but you can learn the process and do it. But if you have invested in the RS2, then spending another $200 for good software to process your data is most likely not a big deal. There may be more third part software but here are three reputable ones. As I mentioned they are not free.
TopoDrone has software called TopoSetter
Klau Geomatics has software called Klau PPK/PPP
Effigis has software called EZsurv (very expensive)
I have answers to some of your questions, but I want to note that I’m not familiar with the MettaTec solution. We don’t know easy ways to integrate Reach with DJI Phantom and usually don’t recommend that. Reach should be connected with a drone’s camera via hot-shoe for mapping, but Phantom doesn’t provide this access.
So, typically, drone mapping with Reach can be done in PPK only. It records precise time marks for each photo. You obtain precise coordinates for these time marks during post-processing in Emlid Studio. Here’s the guide describing the workflow.
You can use Reach RS2 as a base, but it’s not a strict recommendation. CORS logs are also acceptable.
While I do have a Reach RS2 (and will need to have it with me to mark out the GCPs), I’m not sure it makes sense to use it as a base in this circumstance - as I am obliged to do the drone mapping in PPK anyway, and will therefore need corrections from the local CORS station logs regardless.
It sounds like the LINZ service can provide RINEX data (from here) as a file…so presumably I import this into Emlid studio (along with my M2 PPK log) and then the software performs the corrections?
For my Reach RS2 (taking points off the GCPs) I presume the same logs can be used if I am remote and outside of cellular data coverage and need to do this via PPK also. I gather I would also use the same workflow for that.
Thanks for @MDS for the tips re photo metadata updates. I hadn’t considered that step closely… I wonder if a CSV file is accepted by Drone Deploy as you’re right, that dedicated software can get very pricey!
PS - @svetlana.nikolenko you should take a look at the MettaTec kit, as it looks very good (I have yet to do a test flight with mine yet) and is designed to work with the Reach M+/M2 and the Phantom 4 (using the attachment to make the shutter trigger the Reach device to record position).
The nice thing about having the L2 units (RS2 and M2) is you can have much longer base line where the L1 is MUCH shorter (I think 12km). So if you have CORS logs within 100km, then you are set. As you said you can use the same CORS log for the RS2 collecting GCPs and the M2 flying on your P4P. There have been multiple companies put out kits that allow the M+/M2 to be flown on the P4P and trigger events based on the front LED blink.
This weekend I did two exact flights with my P4 RTK and the P4P V2 with an M+ Kit mounted on it. So in the next week or so I will do a comparison to see how they compare when processing in Pix4D. While the M+ is an L1 only, I had my RS2 base on site so that should level the playing field.
So while the kits have been out for a while, it seems they are still being sold and used alot. TopoDrone.org has processing software (TopoSetter) that will do PPK processing on your RS2, the M2, and then update all of your photos with the PPK data. The cost of that is $200 USD which is great software for the money! A major version update was released today so I will try that out tomorrow. It goes without saying that the Emlid products are awesome!!
Ok, so I have had a chance to try this in the field for a client, and have run into a problem.
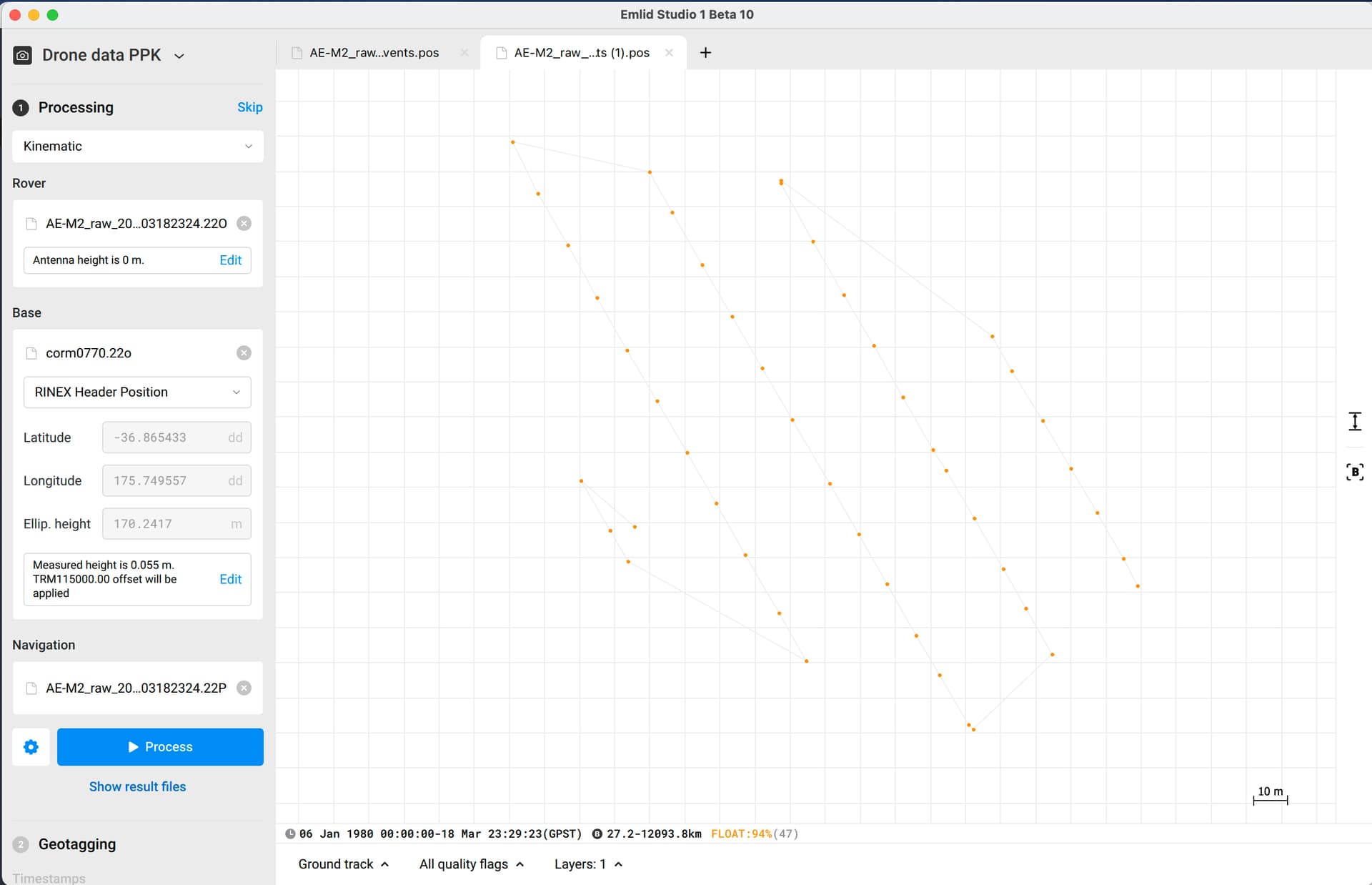
I followed the Emlid Studio workflow but get 94% FLOAT solution. …and I’m not sure why.
As far as I can tell I have done everything right… and the points that show up in Emlid Studio visually match the drone’s flight plan (so the M2 appears to have triggered correctly on each photo, and registered a position). Is it something to do with the corrections data?
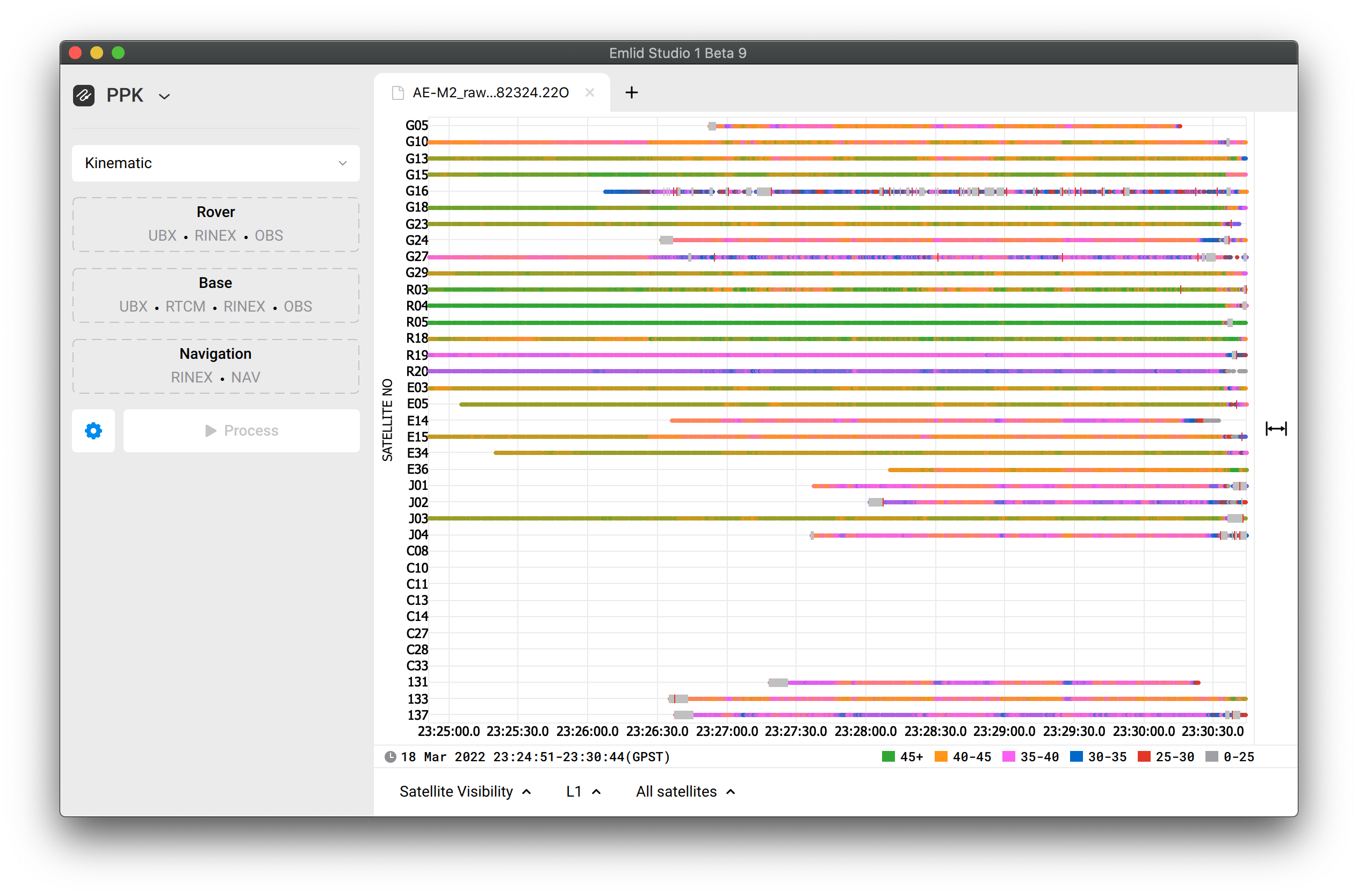
The corrections data is good. But I can’t surely say the same about the rover’s data. I either can’t say it’s very poor. Overall, SNR isn’t that bad, but for some reason, many signals are lost at the beginning:
Unfortunately THAT was the only flight that completed.
I do have data/logs of previous attempts but none of them did the full run (I think a stray cable connecting the aerial to the Reach M2 was triggering the obstacle sensor of Phantom 4 Pro v2, causing it to stop and abort the mission).
Is it salvageable? Why can I not get ANY fix points?
…the other interesting thing, is that I was also doing some surveying with my Reach RS2 over the same area just after this. I was able to get a fixed solution for all my points without any problem.
Is there something wrong with my Reach M2 unit?
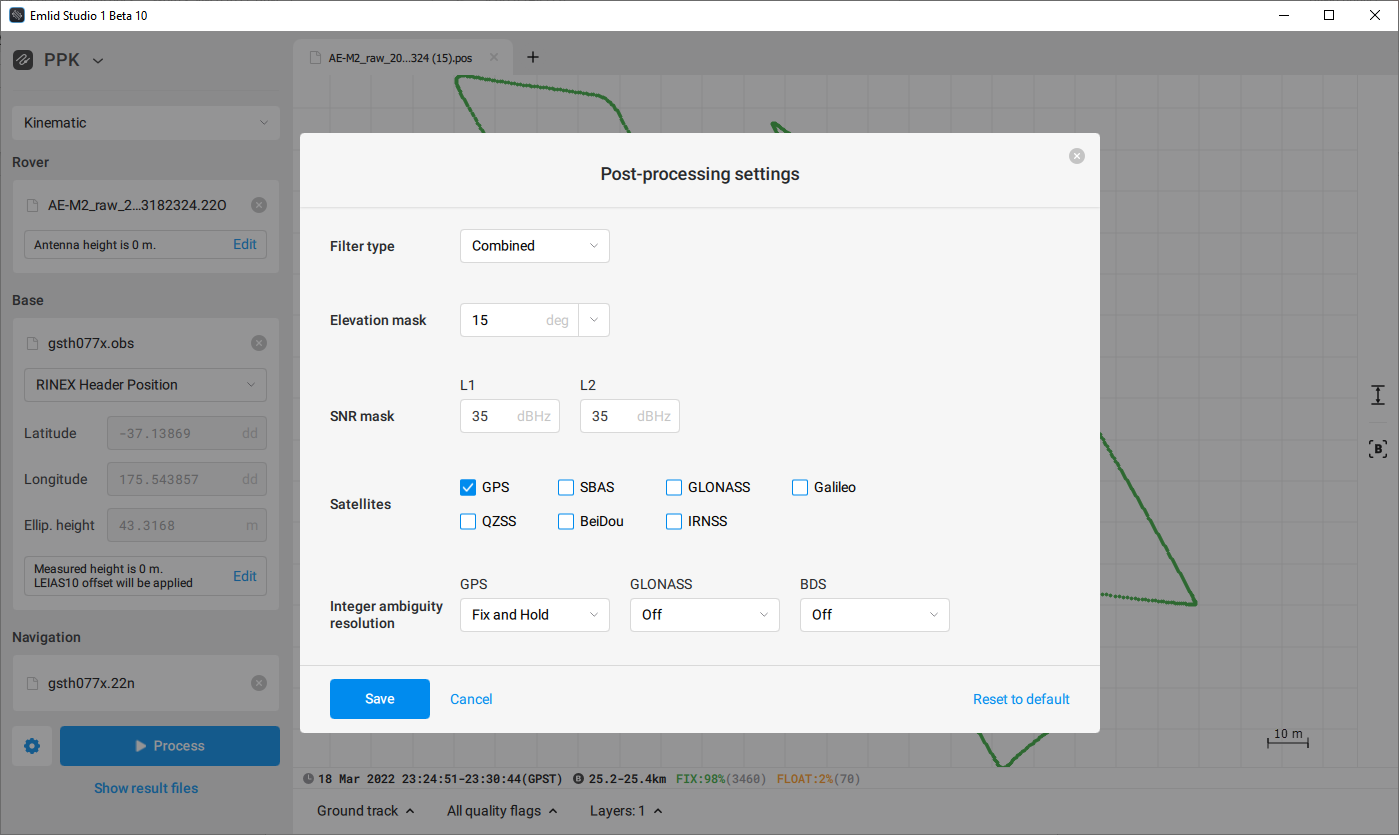
I was curious about this so have taken a look at your data as well. I was able to get a better solution (98% fix) in emlid studio using the GSTH base by disabling all satellites except GPS and processing with a Combined filter (see screenshot for all settings used)
I didn’t pay enough attention to GSTH base. It provides GPS and GLONASS. So, disturbed BeiDou and Galileo signals aren’t taken into calculation.
But the main thing is that the LINZ base provides GPS L2P signals only, which are not supported by Reach. That’s why we can’t obtain the same results as with the GSTH base.
So, no need to disable everything but GPS.
The Combined filter helps eliminate the affection of lost signals at the beginning. I’ve highlighted them in my previous post.
Shane, I still think that something interferes with the GNSS signals. I understand that you can hardly change something in the setup with DJI Phantom. But I’d keep in mind that drones are pretty noisy, and you need to play with the settings in Emlid Studio to obtain good results.
Thanks @david.burlace & @svetlana.nikolenko, was the ‘GSTH base’ the Smartfix (Thames COR station) I got data from? (it was a one-off thing he sent for me to test, as I have a trial membership). Does that provide a different type of data to the LINZ stations?
What does this mean future Drone PPK flights using LINZ? …or do I have to use the paid service to get it to work in future?
Yes, it was the Smartfix. I can’t say LINX won’t work for you at all. We have a lot of users in New Zealand who work fine with this service. But in case of poor data from the rover, GPS L2P only may not be enough.
Thanks… though that isn’t super reassuring…
LINZ data appears to be no problem at all with my Reach RS2 (even in the same place at roughly the same time as using the Reach M2)… hence why I was wondering what is it about the M2 (and using it with a Phantom 4 Pro 2) that causes such problems… …and then why only when using the LINZ data?
That’s the bit I’m not completely clear on yet.
…so the next issue I’ve just encountered is that when following the workflow (using the settings recommended by @david.burlace above) and then going on to GeoTag the photos… Emlid Studio has NOT geotagged them properly and has instead stripped all the coordinate information from (at least some of) the images. What’s going on there?
Also… Why does Emlid studio require 50 images? In this instance there was only 48 or 49… (I had to duplicate one to make the numbers…which may or may not have been a good idea but I had no choice).