TEST3:
same 60m AGL with same flight route and same machine but this time i got 100% FLOAT solution .i don’t know the reason why I’m getting these different result in one machine in same day.
each log file of Base and Rover attached Respectively.
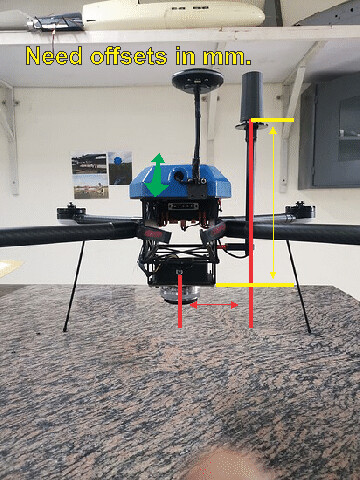
Reach M2 mounting Like this
Infact i seen entire flight Reach M2 solution as FIX in reachview3 and mission planner as well…and reach M2 is the my primary gps for Pixhawk flight controller.No where it shown status as Float in RV and Mission planner.
And for take 3. For Take 3 I still show 91% fix solution. However, It seems that there is a big speed change for each photo? If you fly a consistant speed I think it will be better for gnss signal so that there is not alot of jerky movement with the drone stopping. But maybe that is not the case?? 04-02-2022 3rd take 60M altitude.zip (85.5 KB)
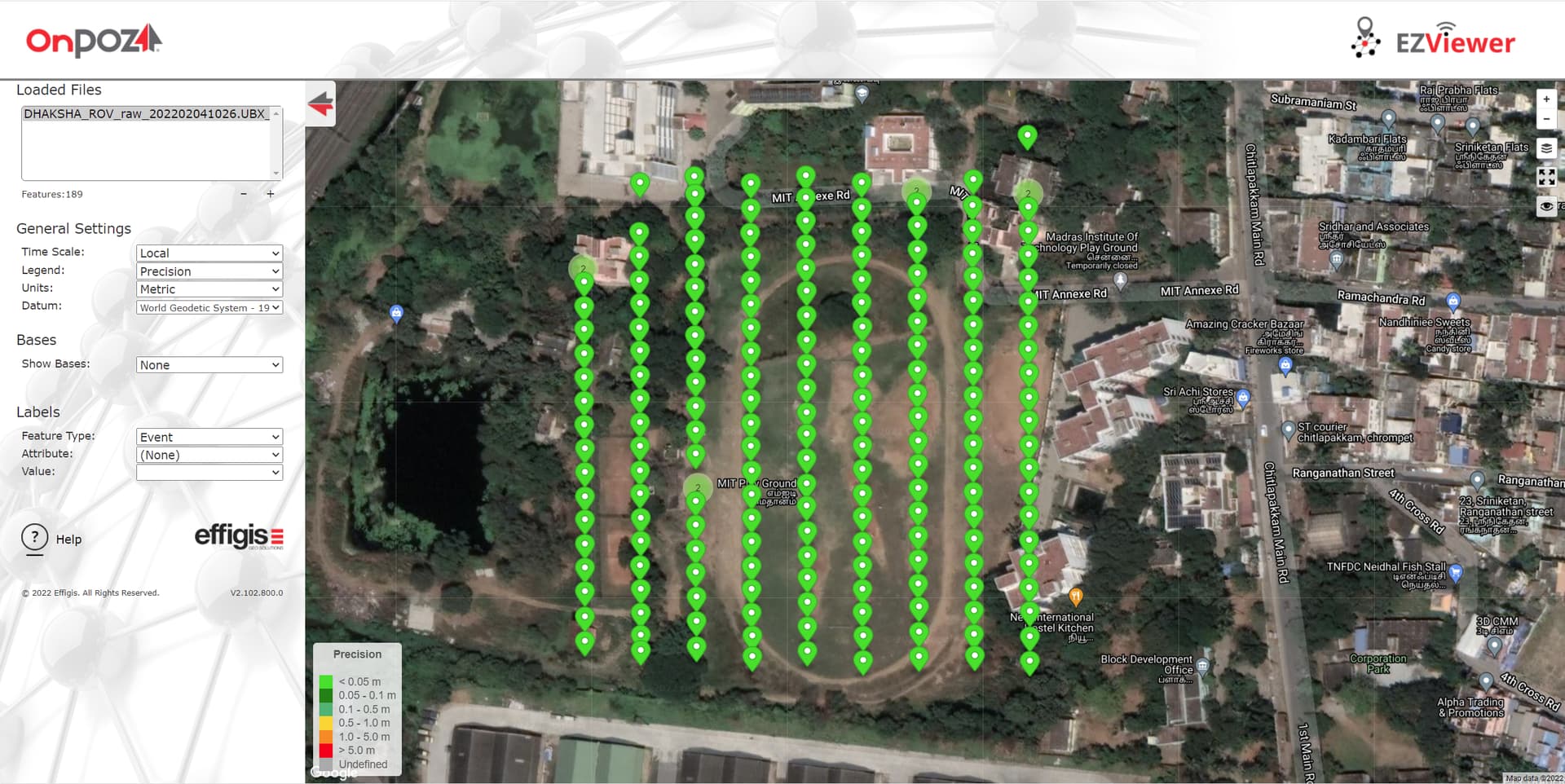
Thank you MDS to check my log…yes out of 189 pos File 1st 12 point were float and remain all 177 is fixed solution. I’m processed with emlid studio beta 10.
Do you have the aerial phots and ground control points to process and check against? If so I will process and see how it looks. Would also need the precise offsets for M2 antenna to camera sensor along with your camera sensor details.
The path was processed relative to your base as I had no CORS file to do PPK on the base location. It just did an average single on the base to establish the base location. If you send aerial photos and details, I will also process it in TopoDrone software to see how it compares.
Thank you for consideration of help.i have aerial photos for all flight and GCP points too…
Yesterday (05-02_2022) had same issue with 2 flights in same area in different altitude 60m,100m respectively.again result was plotted in emlid studio both the Flight result is Float thereis no fix solution as expected.
i have attached photos and GCP points for 3rd takeoff including emlid base and rover file link that you provided.
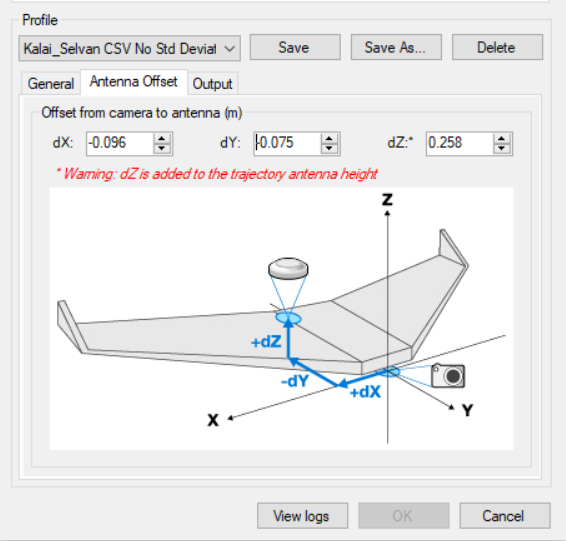
we are using topo setter for post processing can you explain how to input M2 antenna offset. i have attached reference antenna position in the drone in this thread already.
HI Kalai, Can you measure the X, Y, and Z offsets for your M2 antenna. Measure to the bottom of the antenna. Is that a Tallysman HC871? If not what model?
What camera sensor are you using and what lens do you have on it?
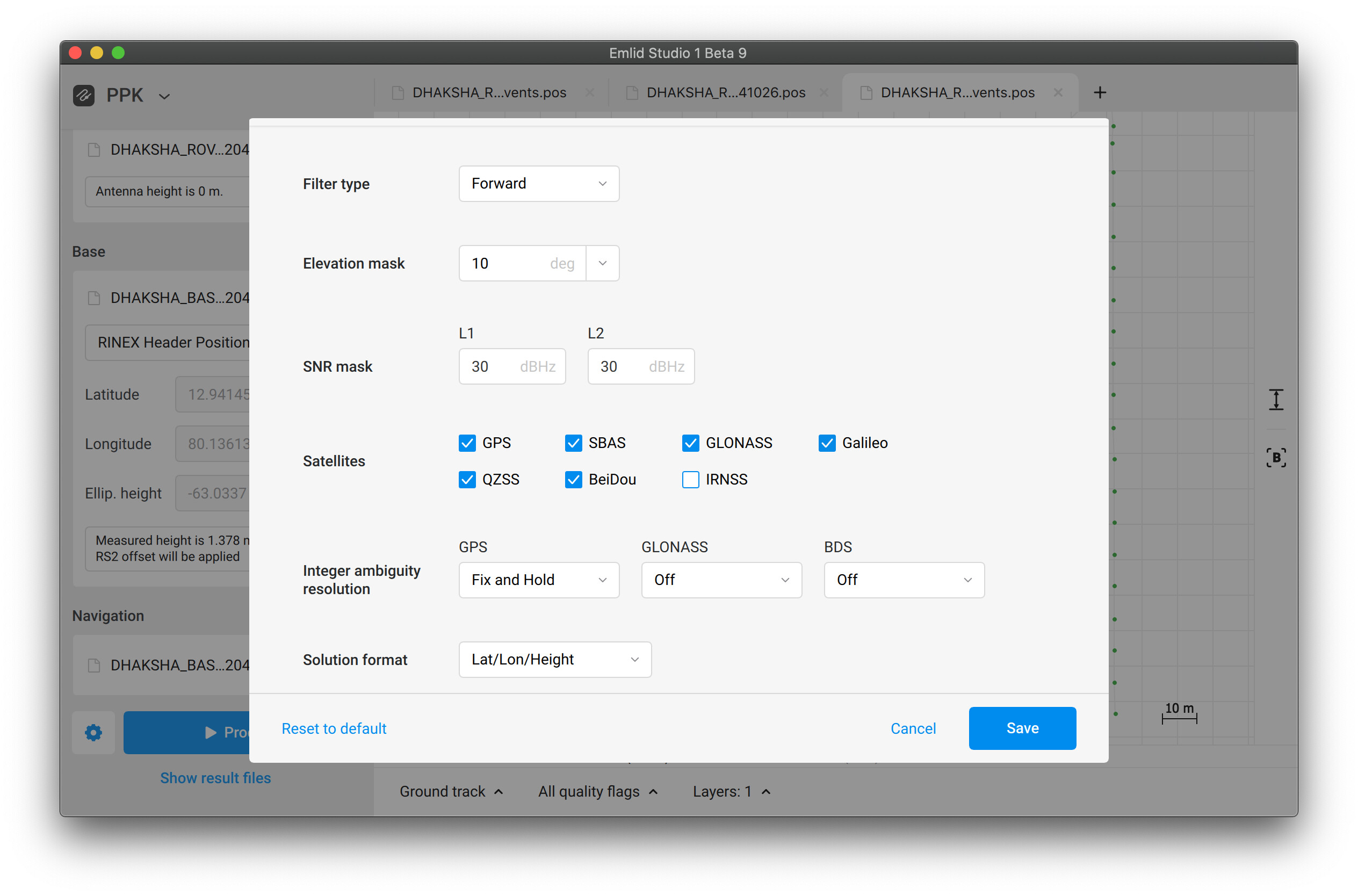
I’ve decreased elevation and SNR masks a little bit. But I also disabled GLONASS and BDS Integer ambiguity resolution, and it did the trick. Their signals have poor quality at the beginning of the logs, so it affects the solution calculation.
I will make measurements as you shown here.
The antenna I’m using is default antenna which is come by Reach M2 unit.i don’t know what antenna series is this.
Camera I’m using is Sony A5100 modified series from foxtech hobby the effective resolutios are 6000*3376,lens which I’m used is 16mm.
As you said If disable those setting or disabling of Glonass and beidu Satellite system will keep solution as fix and won’t affect the entire result in means of cm level accuracy.
Did you check all 5 flight including just uploaded 2hrs back which recently added in the Google drive .
This 2 log also giving the fixed solution still?
Do you think what factor affects the Glonass and beidu Satellite systems .because 1st take at 80m result was fully fixed solution without configure any changes in emlid studio.
Do you suggest to disable Glonass and beidu during logging in future set-up also .since I’m in Asia region these two Satellite will have more coverage but what reason these signals get affected?
Or do you think my internal electronic setup affect the reach M2 and it’s antenna performances?
Kalai,
There are not any GCPs listed the uploads with the other data. Regarding the offsets, I estimated that your offsets are close to the below image but I will await your actual measurements and GCP info.
You do not have to have 100% fix to have good photogrammetry results. It is important to establish your correct focal length. Also the 60m flight had multiple missing photos. The 100m flight was fine (all photos present) and showed 100% fix without any changes to normal processing. If you have GCP data, how did you obtain that? Ideally you are using an RS or RS2 Rover to obtain the GCP data and the same RS2 Base log that is used to process the drone flight is being used to process the GCP observations.
yea its Foxtech Map-02…do you have experience on this camera ,if yes why there is no correct time and date i cannot obtain from it for every boot . if there is way to fix this issue?
yes i just tried out for the one flight data with her setting and i got 100% fix solution
which flight is this i have checked every flight pos file with aerial photos too. everything was correct only.
i have already attached GCP points in the Google drive link which you provided. We have taken the GCP point using E-survey DGPS(E-600) equipment and mark on the photos just white paint marker. https://esurvey-gnss.com/product/survey
E600 survey DGPS were used for the DGPS.
RS2 base only act as base No rover function here and that’s used to correct the Rover M2.
here we are calculated Reach M2 antenna offset with the camera are:
X = 104mm( RED marked)
Y = 7.257mm(Green marked )
Z = 230.378mm(Yellow marked)
here I’m attached the offset calculated by software report M690.pdf (189.1 KB)