Right, but let me explain these results a little bit.
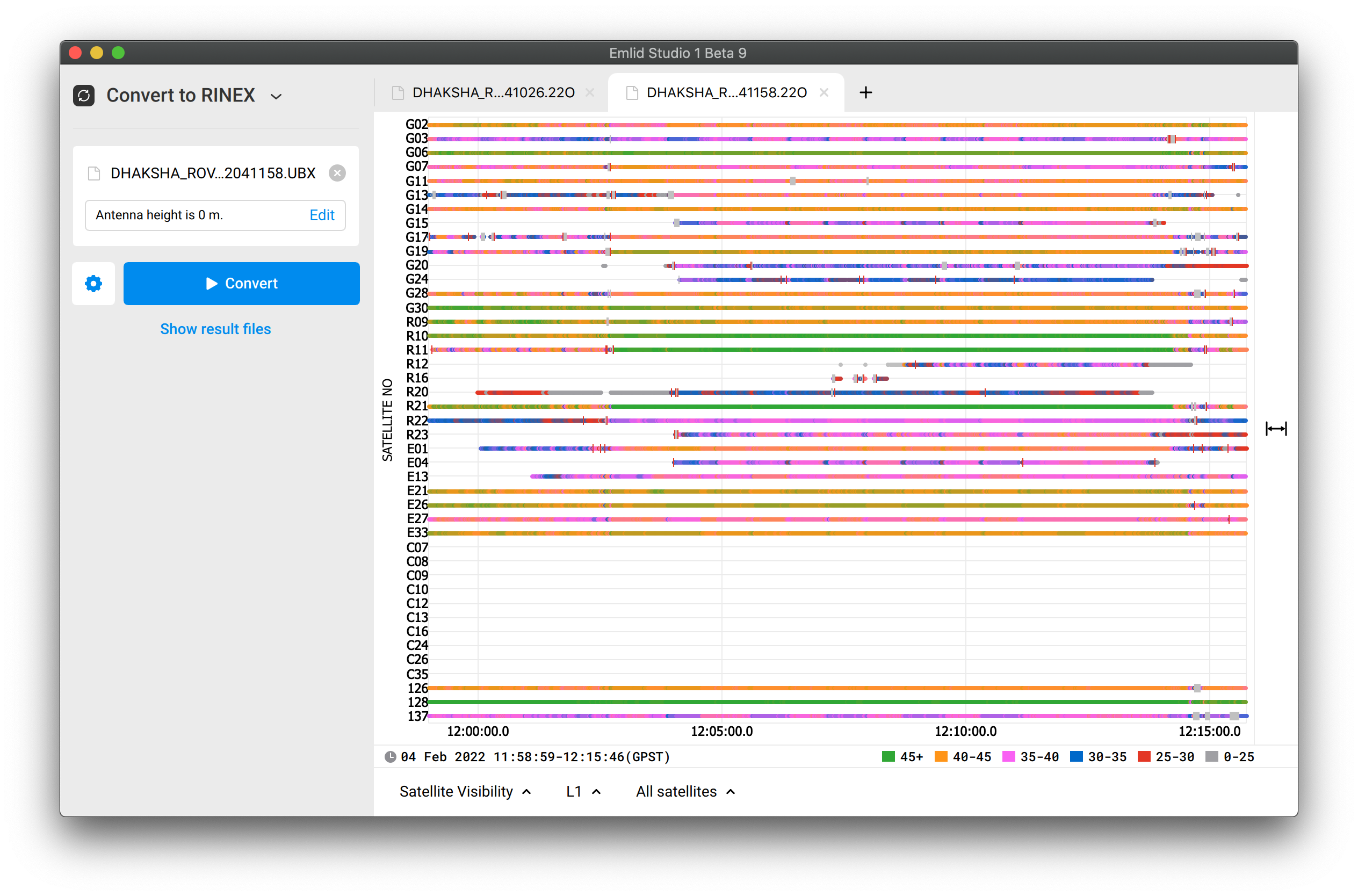
It indeed looks like internal electronics affect the performance. The raw data quality isn’t that poor, but it could be better. For example, let’s examine the log from your 3rd flight:
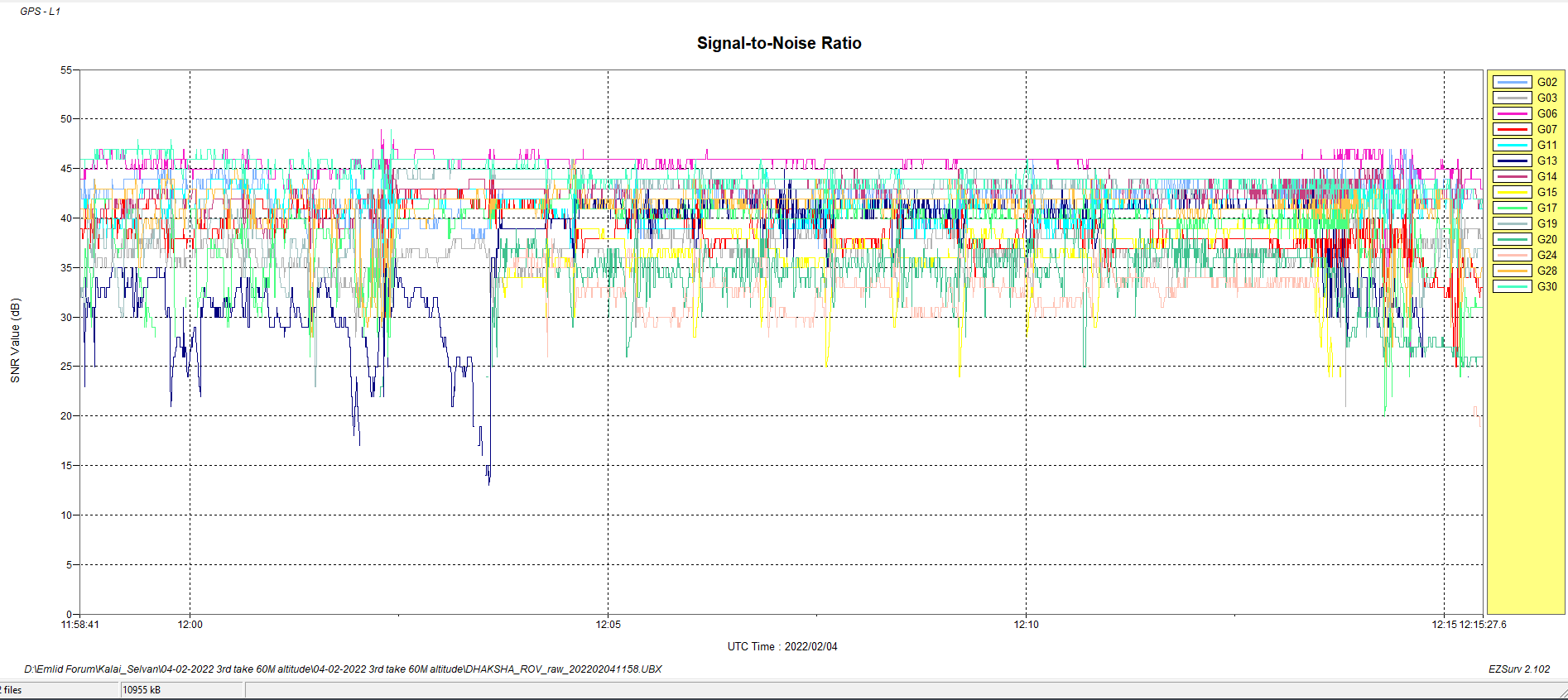
SNR of almost all signals jumps between neighbor values. In appropriate conditions, they decrease and increase steadily.
SNR doesn’t need to be 45+ all the time. But its instability makes issues. The reason for the 100% Float solution isn’t in Glonass or Beidou satellites. If you exclude GPS and Beidou from calculations and leave Glonass only, you’ll be able to receive a Fix as well. I’ve just checked it.
That’s why I’d not recommend disabling all constellations but GPS. It’s better to find the source of noise and isolate Reach and antenna from it.
I will go back to the original folders you posted and check it there.
I found the file for the GCPs. Do you use the RS2 base to PPK process the E800 data for calculating the GCP coordinates? If not, which BASE file was used to process the E800? I could not locate a CORS station for doing PPK processing on the RS2 Base unit.
IMO, the ideal project will involve the following:
RS2 Base unit set up statically to serve as reference to drone flight and GCP collection (you had this).
If no CORS data is available to PPK the base, then steps would be taken to do PPP processing ahead of time and setup a benchmark so that the RS2 base can then be setup later over a “known point” and keep data consistent moving forward.
Rover to collect GCP data and use same RS2 base data that processed drone flight to do PPK processing on GCP data.
Photos of GCP collection to verify point of collection in case another person is helping.
Good folder structure for all data collected. I use.
MAPPING MISSION
DATE + Mission Description (2022-02-08 MIT 100m flight 1)
BASE
ROVER E800
ROVER UAS
FLIGHT PHOTOS (subfolders used for large mission with battery swaps)
When you start doing lots of flights, I find this structure helps keep everything organized and prevent getting flights mixed, up, etc. But there are certainly other formats and structures that people use to fit their needs.
There are many many moving parts to the entire photogrammetry process. I have responded with some big picture thoughts and got away from the original question. Gathering good gnss data, processing that data, and understanding the collected data (as Svetlana describes) is one part of the big picture (but a very big one!). I don’t think I will ever understand all there is to know but I try to learn everyday.
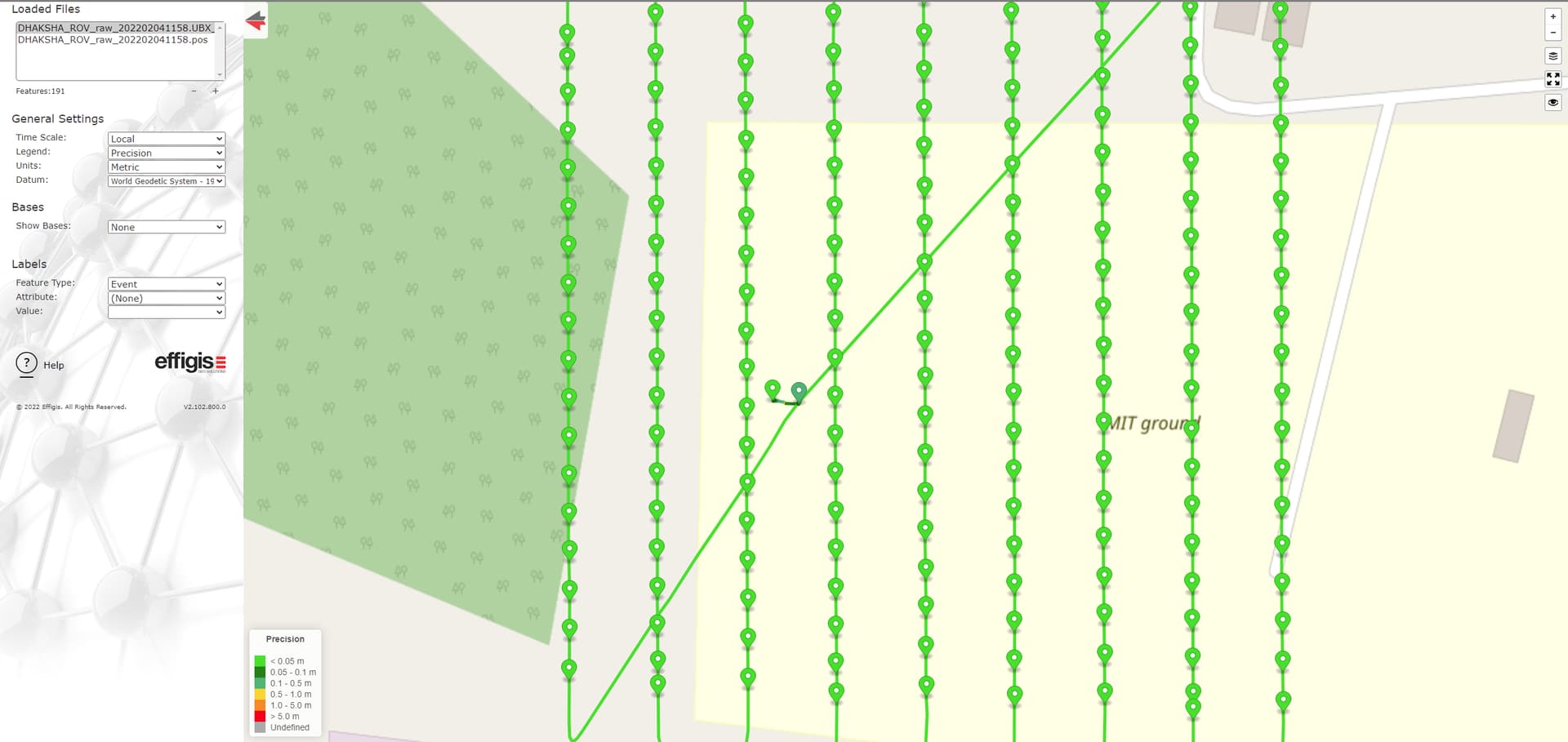
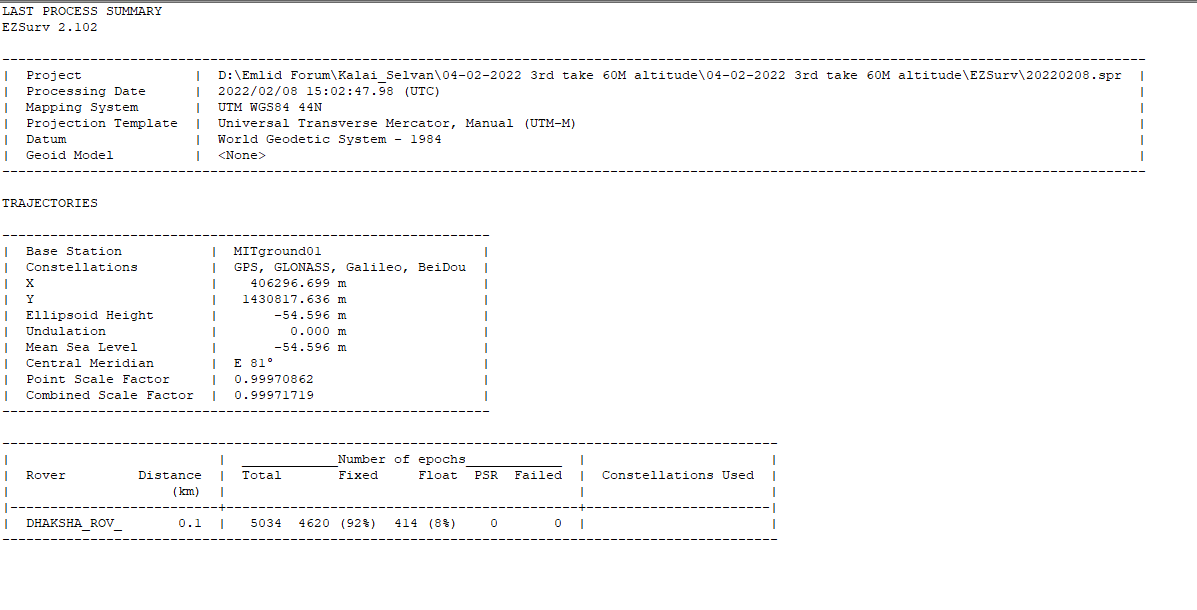
To get back on subject, I processed the 3rd flight and show 92% Fix of the 5034 epochs. When looking at the PPK POS file, it is the take off and landing that is a float solution. So if the photos had been updated with PPK data, you should get really good results. Many flights can have float solution in take off and landing. I think it is best to take off and land in nice wide open space when possible which I believe you did.
@wizprod I think you use ezsurv. When I reject the satellites with low SNR on any constellation it does not seem to make any improvement on total percentage of fix epochs. But with having a fix for the entire photo part of mission, I think it is not important. Do you agree?
As I understand the removal of specific sats is more if you have a bad signal from a sat. I would not expect it to give more fix percentages, but rather a better fix. If anything, it will take a sat out of the calculation and potentially make the solution worse if done when not needed.