



not very long. how long would you recommend? I think you are onto something.
Why would it only get a float though, surely it wouldnt record at all?
I think we can sum it up to “When you have a fix, take-off”. But I guess you don’t have any real-time correction source, right ?
5-10 minutes should be enough, if you have good sky-view.
Also, are you using the “Combined” filtering method in Emlid Studio?
That’s one of the reasons for either powering your receiver independently, so it can collect for a few minutes before the flight without draining the drone battery idling, or using an M2, which has a much faster time to first fix.
No. I’ll look out for that, what does it do?
if you are PPK’ing, the M2 or M+ never achieves fix throughout the flight, does it? I can log into the M+ with my phone and check its status to ensure it is right to take off. What should I be looking for? ‘float’?
I misspoke, I should have said solution instead of fix. The single band units need a lot more time to stabilize their position solution after starting up.
1 Like
Why would you do that? The drone itself is what should be shielded from the M+ antenna which it already should be from the manufacturer for their GNSS module.
What size/material of base plane are you using?
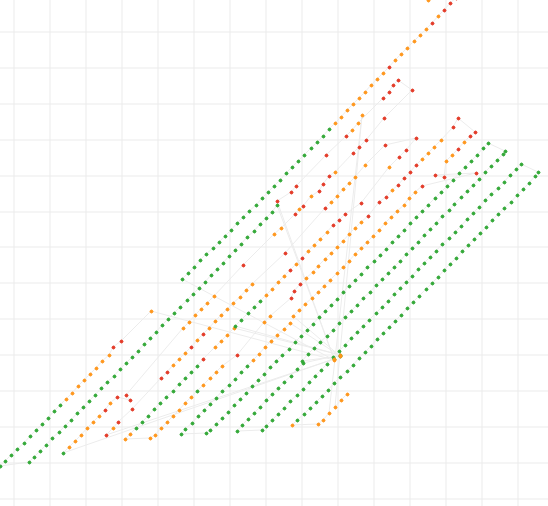
It just looks like something caused issue and the end of the second to last leg and when I see something like that I go right to the satellites.
it was the first leg
it was suggested and it definitely seems to have improved it.
1 Like
This is pre-wrapping, looking at it, I might’ve just gotten lucky and not run the drone for too long in the above flights. It seems like it has a fix for 15-20 minutes or so then losses it.
Ill do more trials tomorrow and note when I do a battery change.
First leg makes more sense. I thought you said the first were fixed.
We have 3 Tuffwing kits (2x M+ and 1x M2)that have been in use for at least 2 years and never have any of these issues and have never used anything besides a base plane on the M+ tallysman. Nothing on the M2 helical. You are most likely going to get a mix of fix and float which is why we PPK and optimize but what you showed with the “unshielded” data there is something else wrong.
Were these run on the same day/time/location? If not testing is suspect.
No, same place, a day apart. I’ll be doing a test today in both areas. I’ll wait for 5minutes before sending the drone up to ensure I don’t have any floats at the start of the run.
1 Like
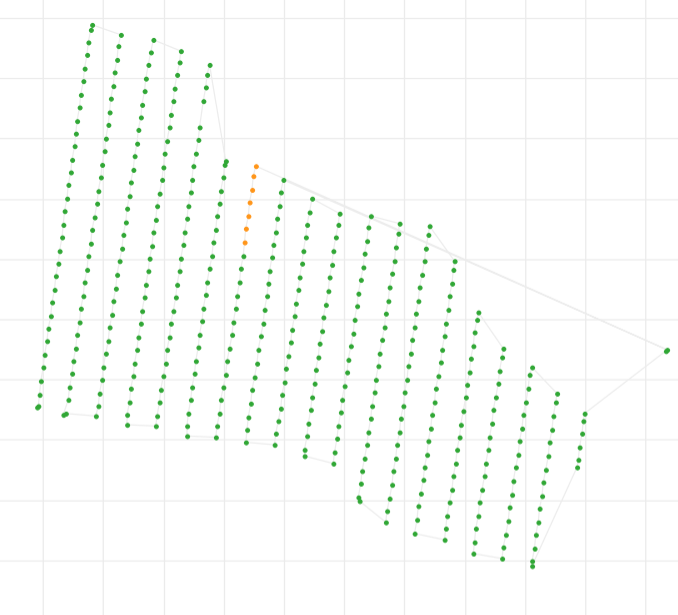
Success, nearly.
After leaving the reach on for a little bit, I got fix for all but a few points.
I used ‘combined’ for my filter type. if I hadn’t, I only got two fixed points. Is there a reason why combined isn’t on as default?
Now I have one more issue - I’m one picture short. I cant process without it, what can I do? Getting excited, I’ve never actually pressed ‘Tag Photos’ and it work before.
Files here. Again, big thank you guys, this forum is great!
Took a look through your data. I noticed a few things:
- Your base is in 30 sec intervals. Much too slow for a 5 hz rover. You need to have a 1 hz base.
- You are only logging the GPS constellation on the base. Enable at least GLO as well.
- You still have Signal quality issue on the rover. What antenna are you using currently?
- Allow more time for the Reach M to track and lock sats before taking off first time.
3 Likes
I bought a Mettatech after trying everything with the Tuffwing.
I would not recommend Tuffwing for their support or aftersales service.
I have opened another thread to discuss Mettatech.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.