Hi all,
I’m becoming very frustrated with PPK, I have trouble with both this kit (not all photos seem to be logged*) and the solution when post processing.
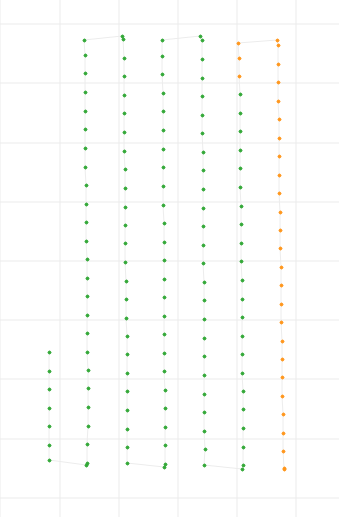
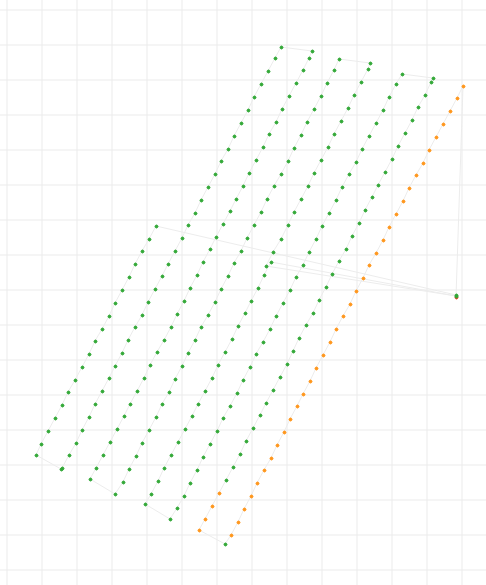
I’ve attached my logs, I get a fix for 56%, float for 30% and single for 14%.
I flew at 3m/s (slow and steady as I wanted this to be accurate, its 101ha and I didn’t want to repeat, which it looks like I will). Logs can be found here: Logs
I read a few other posts and I might have an interference problem, but why is it so intermittent? I’m very much a rookie when it comes to all of this and would love someone to audit my settings for GNSS etc and tell me if I am right. I’ve looked at the guides and believe I’m spot on (I’m in Australia). I’m going to try the aluminium foil, that seems like a design issue with the kit.
There is limited phone signal out here so no NTRIP. I got my base station coordinates from PPP, 15day wait after 20hours of logging.
*Emlid studio is asking for only 523 photos, I have 615.
Finally, I really can’t afford to upgrade to a RTK drone, so if I can’t get this working, what other solutions are there without heaps of GCPs to cover 101ha.
first switch to a helical type GNSS antenna like HC771 Single-band Helical Antenna | Tallysman . The Patch type antenna you are currently using isn’t great for aerial purposes, and needs a significantly larger groundplane than you have currently. A larger groundplane is obviously not practical for a drone.
next, wrap the M+ in tin-foil or shield it with metal in another way.
That should give you some more consistent results.
If you have access to a 3D printer it’s fairly trivial to design a print an adapter than can be used on your existing pole. You’ll need a female SMA cable from the M+ going to the antenna, but best to double check the datasheet of the antenna.
I don’t have access to a 3d printer, I wonder if there is a kit?
Has this been done before that I can have a look? I don’t know what you mean by pole, I’m putting this on the drone
You already have a pole on your drone holding the antenna
I am not aware if there is an already done adapter, but the is antenna is routinely mounted on drones, though mostly surface-mounted.
I’ll order it and the cable and see how I go. If you come across any other example of someone doing something similar, can you post a link, I’m looking now. I really appreciate your help.
Couldn’t you just drill a hole in the aluminum plate for the new coax to fit into the helical.
Here’s how we did the M2 kit. That’s just a rubber spacer with a slot cut for the cable to fit under. It has worked well although the drone has trouble when satellite counts are low that day. Only occasionally though. I plan on making a slightly different mount to move it a little forward and a little higher but I just haven’t had time with all the new projects we have starting up.
I would say yes. Time to fix is significantly reduced, so setting up is much quicker, and the entire solution is more robust and resilient in challenging conditions where there might be some interference or obstructions. The main downside is that you also need a multiband base so it’s quite a jump in cost.
But since you already have that, it’s worth it in my opinion.
edit
I would definitely try to fix the issues with your current setup before buying an M2 as your M+ should be able to give good results. Looking at the location, the environment looks fine so I think it should be on the drone that the issue lies.
Thank you for posting this, it is very useful for me. I started using a P4P.V2 with a Reach M+ (PPK kit of MettaTec) and a Reach RS+ as a base station. Is PPK the only option or can I enable RTK with adding a Lora Radio to the setup? Do you know where I can find a good tutorial for the initial setup?
RTK won’t really do you any good because it is currently not possible to tie into the camera so it will write the RTK values to the images. RTK could potentially aid in the re-tagging process since you might not have to perform the PPK process but I find it necessary to check RTK values as it is possible to bounce from RTK float to fixed or just lose RTK completely. I see this happen most commonly when we are on the edge of service but that because we are using NTRIP.
Thank you Michael, I get it, RTK can’t be connected to the camera. I will have RTK for the Reach RS+ via NTRIP. How did you setup the M+ with a base station?
When we first started we just had it and a local base logging for PPK. Eventually we figured out we could just base the TXDOT CORS logs that they post online. They don’t allows us to access realtime corrections unless we are on one of their jobs so we moved on to an actual RTK provider. One of the things I love about Emlids is that it is easy to RTK and log at the same time. We seldom use the P4’s for critical gradework now that we have the Yuneec RTK but it still does a great job.
As Christian already said, there is an issue with data quality. Drone electronics indeed may be noisy and affects the data reception. I just want to confirm that poor data quality may lead to time marks loss.
*Emlid studio is asking for only 523 photos, I have 615.
This means that some time marks were lost in your case too.
Of course, isolating Reach with a foil and changing the antenna is worth trying. But I also want to note that Reach M+ is designed to register time marks via a hot-shoe, which DJI Phantom doesn’t provide. So we can’t guarantee such a setup will work properly.
You can do this to your drone as well if you are really having consistent problems. Don’t be afraid to get in there (unless it’s a DJI P4 series) and see how you can shield the drone chipset. We use to do this on P4’s and it was a pain but it was a slightly different situation because we were running one of the add-on kits and had two GNSS chipsets running at the same time.
OK, so to continue this thread on bad PPK data.
I carried out another couple of flights with the M+ and Tuffwing. I’ve wrapped the M+ in several layers of tin foil.
There is definitely an improvement, its strange that the first few photos are the ones without a fix though. I wonder what is changing? Is the drone getting upto temperature and the EM noise disappearing?
The number of photos don’t match but only by 3 or 4, rather than 10 or 12. Its a shame that you can’t do anything with Emlid Studio if there is not a match. Redtool kit is good though.
I have a new antenna on the way as well as a MettaTech kit. Next plan though is to shield the wires of the Tuffwing with EMI shroud. Copper foil
At this stage, I’m more curious about how to get it fixed.
Can you, the professionals, see anything in the data?
Any more suggestions?