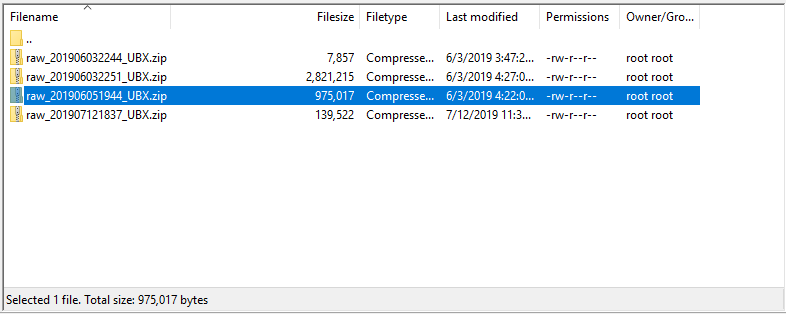
My raw log does not contain the whole session on Reach M+ with ReachView version v2.16.1. I have a Reach M+ mounted to Phantom 4 Pro with Tuffwing SnapPPK Kit. This is not in regards to the kit but effects of certain settings on the raw UBX log. I sent an assistant out to fly a site for a first little shakedown run. I pulled the raw UBX file and only contains 5 minutes of about an hour plus of data. I noticed they had on correction input from serial port and was sending two output correction streams one bluetooth and the other over TCP… Didn’t know to check. Should have been logging GPS and GLO @5hz
I am a little confused on why the session was not logged in full. I noticed when testing the other day the log did the same thing (just pulled the data) with same settings and it was on well over an hour. Would these settings have an effect on the raw log? Its almost like the log stopped as soon as the drone left the ground as I made a point to log for several minutes before launching to acquire fix. I am troubleshooting/trying to recreate the issue now. Any help is appreciated. I’ve already turned logging on/off today on several sessions and seems ok.
Recreated same error last night. I logged for about an hour (55:43). When I went to turn off logging it again saved only (1:43) worth of data. Working on testing on various versions of Reachview but it appears to corrupt the raw log file during save command.
Will do @tatiana.andreeva. I have updated version to latest development build. Have not had chance to log. I know not as stable but have other Reach M+ in my fixed wing that I can move back and forth easily. Will test later today off to fly said fixed wing now.
I went to 2.18 after reflashing firmware, something was off and was definitely buggy. I got functional and raw logging worked and saved in entirety, timemarks too it appeared.
Unfortunately, we had issue with drone on last flight. The drone has yet to come home and there is a new Reach M+ out there with it. I guess we will never know if it was truly fixed
May I ask you to describe your step-by-step actions of saving the raw data log before you turn off the unit? Please advise if you follow the next sequence:
Hello @tatiana.andreeva. I follow this generally on every logging session. In the case of the last flight this was not the case as the drone was in tree. The Reach shut off when the onboard battery died.
For all other instances I turn off logging, let process, then power off. Can clarify “wait until data processing finishes”? Is there any way to not do this and it show up in the log directory?
I’m currently trying to reproduce your issue (unsuccessfully till now). It’d be great if you may answer a few questions and accomplish some tests as well.
Have you got another Reach M+ unit to check if an issue remains with another device?
Could you please generate the Full system report and send it to me in PM?
I suggest trying the following tests:
The 1st test
Put the unit to record a log for 40-50 minutes
Disable raw data recording once it’s done
Wait until data processing finishes
Disconnect unit from the power
Power the unit on and check whether logs are presented
If yes, try to download them and check whether they are correct or not
The 2nd test
Put the unit to record a log for 40-50 minutes
Disable raw data recording once it’s done
Wait until data processing finishes
Power off the unit from ReachView
Disconnect unit from the power
Power the unit on and check whether logs are presented
If yes, try to download them and check whether they are correct or not
The 3rd test
Put the unit to record a log for 40-50 minutes
Disconnect the unit from the power once it’s done (don’t switch the logging off)
Power the unit on again and check whether logs are presented
If yes, try to download them and check whether they are correct or not
The 4th test
Put the unit to record a log for 40-50 minutes
Power off the unit from ReachView once it’s done (don’t switch the logging off)
Disconnect unit from the power
Power the unit on and check whether logs are presented
If yes, try to download them and check whether they are correct or not
It’ll help a lot if you may check all these scenarios so I can compare it with the results I’m getting.
I do have another Reach M+ on fixed-wing and that unit has had no issue, regardless of how saved. I will send full system report via PM. Please allow a few days for me to complete these tests on my end, thanks for assistance.