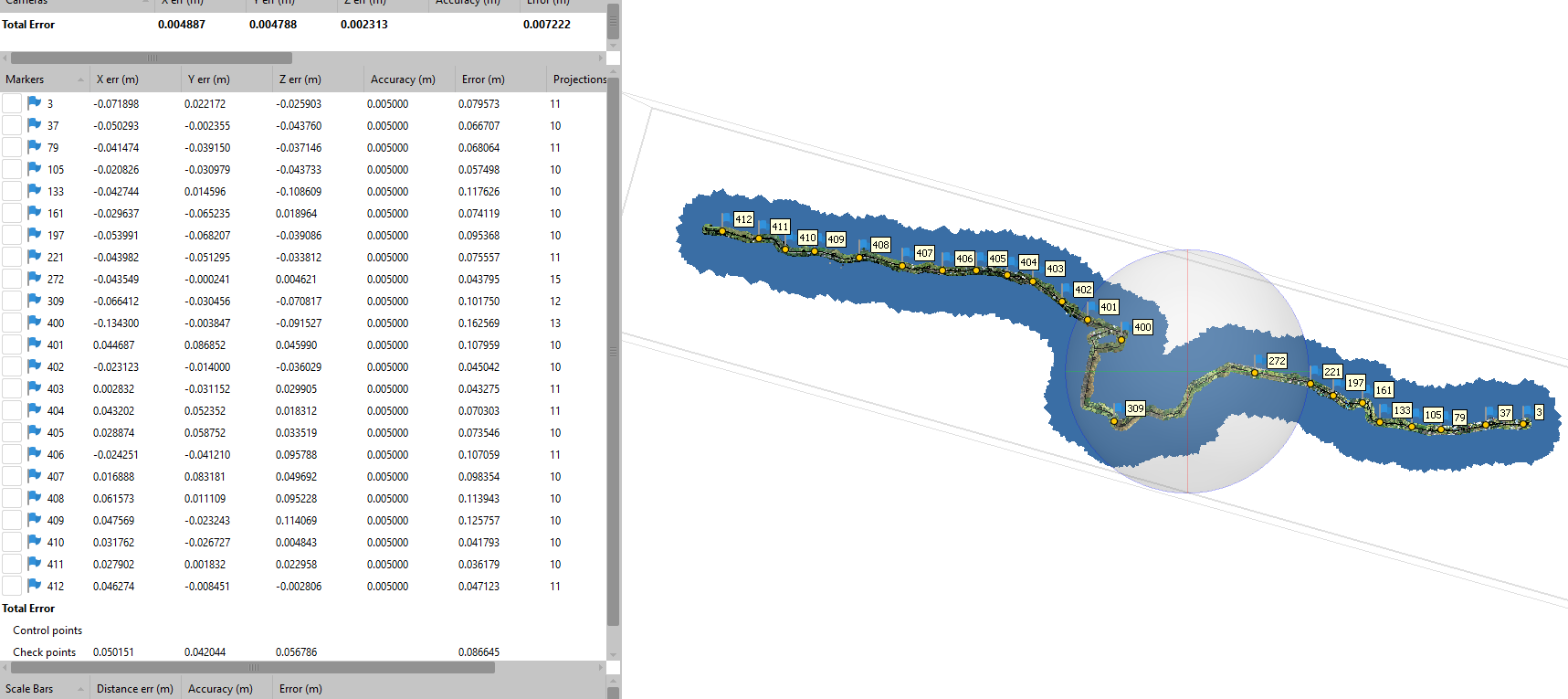
Processing was for 5 blocks. Each block was 1 flight day. 1 GCP for 1 flight day.
Next all Blocks were merged and points were not checked so as not to start the adjustment again.
I know that, I am a Metashape user.
That is why I thought they were only check points. But Konstantin answered about merging chucks that were processed before.
Have you considered making a low cost version of ashot board which is just a power supply without camera control? Just so as the less adventurous or technical among us can power their own setups (reach + LED detector) without having to pull the gimbal apart?
Could you expand on this a little further? I use an LED kit and it is very reliable. The problem I see with your kit is that it only comes into play when you’re running RTK which most serious mappers are not right now. RTK is not stable enough for prolonged flight and daily flights for commercial work when your results have to be spot on every time. PPK is the only way that you can guarantee that the data you are inputting is solid.
Satellites need to be more reliable and LORA transmission needs to be more dependable with longer range.
LEDs have timemark delay about 50-200 ms. If you fly “stop&go” it is not a problem.
But if you fly 8-10 m/s speed - it will a big problem to make timemarks.
AShot make timemark without delay - in the middle of exposure.
You are right about RTK and PPK. PPK is more and more better RTK.
Thats why Teokit is PPK kit.
Teodrone make 10-15 sq km per day easy (4-5 cm/px) with 1-5 cm accuracy with 1 GCP for calibrating focus lenght.
Teokit does not use LORA, because it uses PPK only.
Time mark does it matter if you use GCPs and even then all sets can be built into post-processing.
I know the ashot was meant for RTK, so how is teokit different. I thought it was used in combination with ashot? And you were tagging the photos directly?
LEDs timemark delay is not stable. It can be 50 or 100 or 200 ms. It is very large delay and you cant solve it in postprocessing.
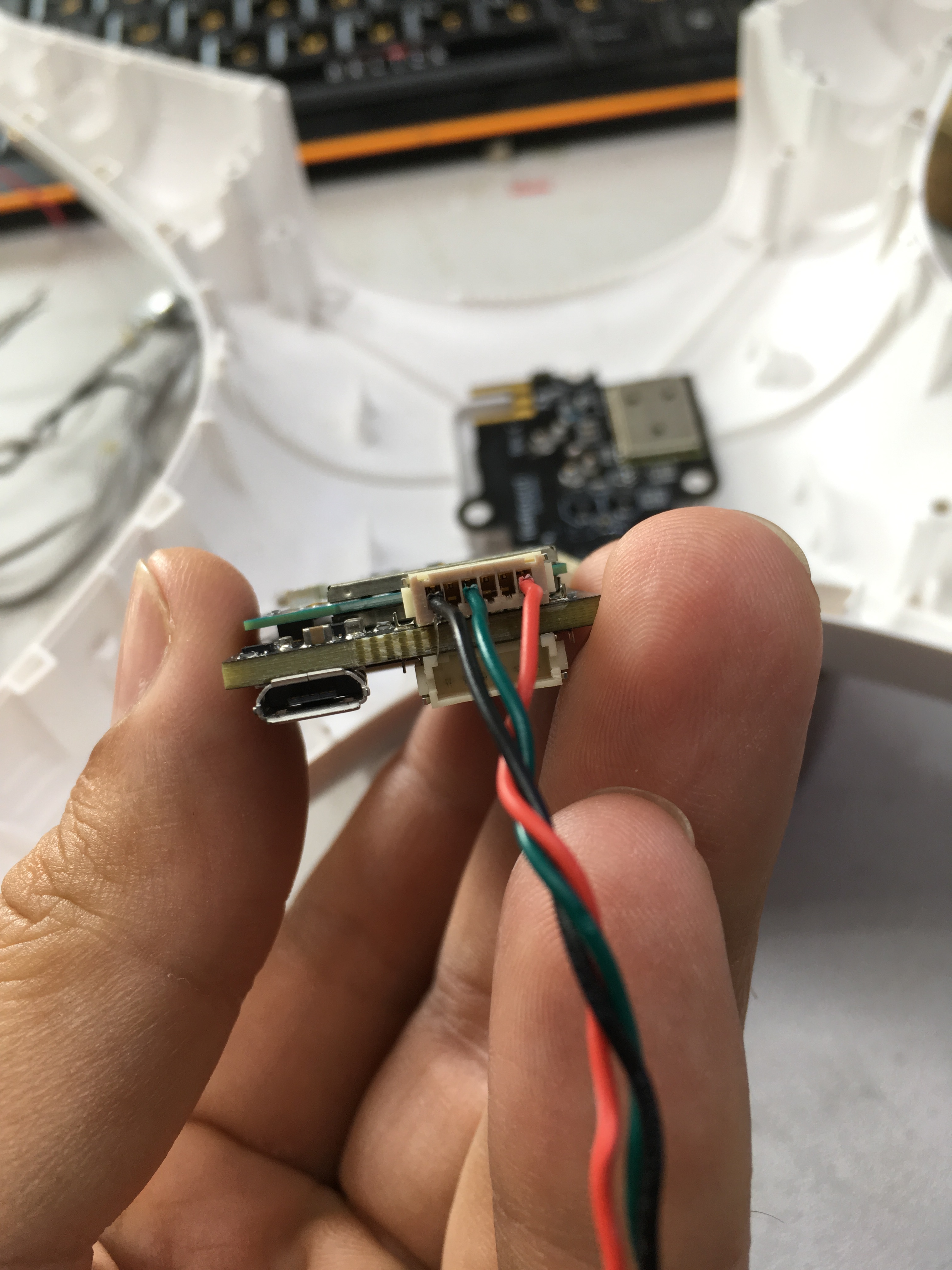
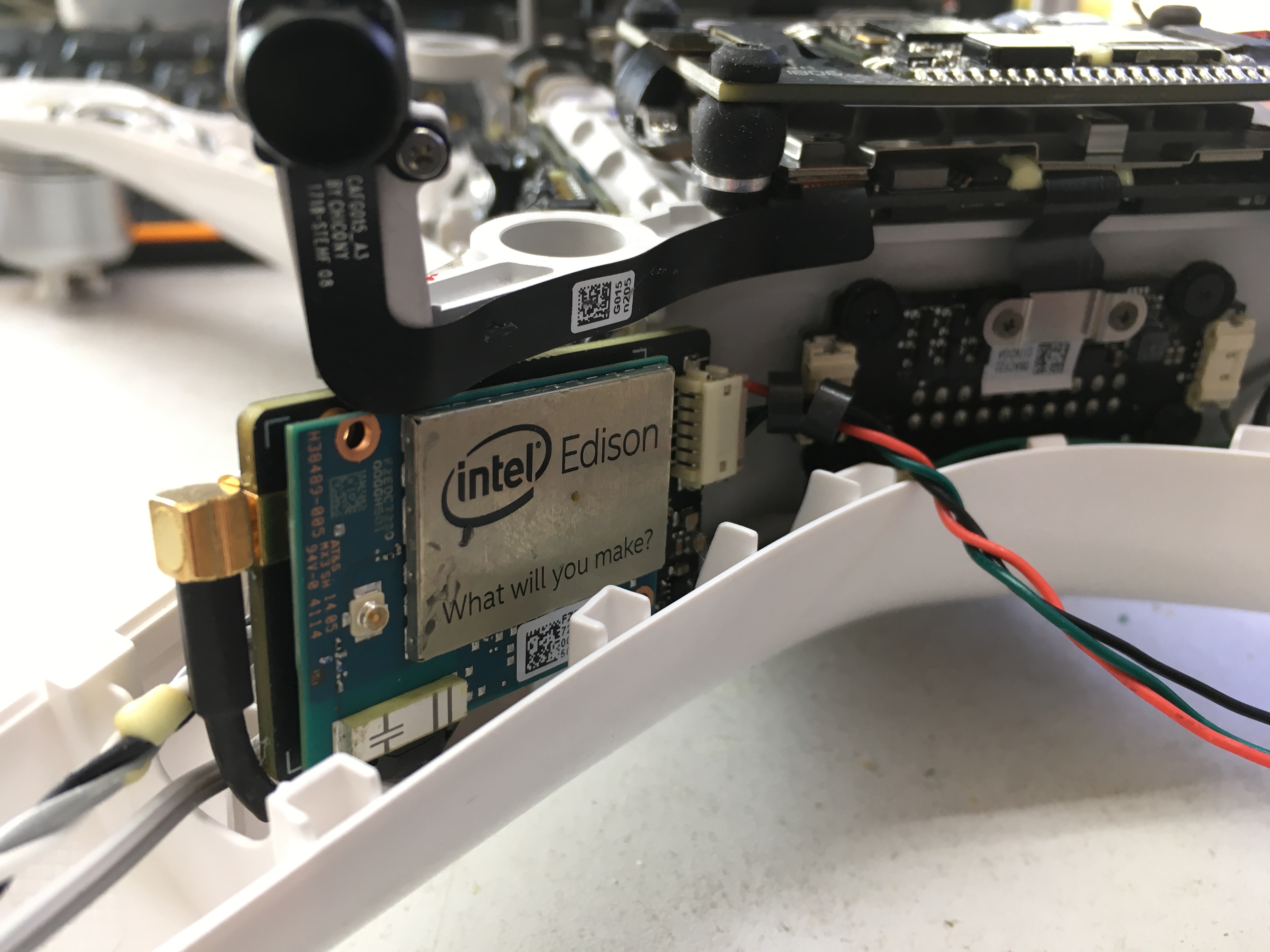
AShot is sync board and send timemark event to gnss board when Phantom camera make shot.
Teokit is set:
AShot for sync timemark and gnss
Teoboard for connecting antenna to DJI AP and gnss board
Reach M+ for recording RAW sattelites
Spiral antenna
cables
is it required to keep M+ record log for at least 30 minutes before stop and save the log file? I was told this is the requirement for L1 only GNSS to get FIX in post processing.