with 170 meters flight height and 10 m/s speed ?
GCPs were measured with Javad Triumph-1 in RTK mode. Which info do you want know else?
with 170 meters flight height and 10 m/s speed ?
GCPs were measured with Javad Triumph-1 in RTK mode. Which info do you want know else?
Geotagging photos is very easy: first photo is first timemark event in events.pos file.
Last photo is last timemark in pos file.
For geo tagging photos we can make software. It is not difficult.
We can also add a function that takes the pitch and roll of the copter during the flight and adjust the coordinates taking this info.
Do you want it?
Can you please find a solution for downloading that doesn’t involve installing a app? Wetransfer i.e. or even Onedrive, where you don’t even need to sign-in to download.
Who else on here can legally fly at 170m? even at those figures to get sufficient overlaps for a good map it would take you about 6 batteries so I don’t know how that is done with 3 flights.
I still don’t think we are on the same page as far as the accuracies are concerned. 5-9cm relative accuracy across the site is very easy to achieve. That can be done with ground control points alone. The accuracy that I am talking about is actually taking the surface from the model created with the drone, putting it in a data collector and staking the surface.in rougher areas with dirt and other loose material 5-7cm is a good range, but on smooth surfaces such as roadways it’s more like 2-3cm when using PPK and gcps. In our program the number one requirement is ground truth according to the benchmarks provided by a surveyor on the plan.
The process of our work and accuracy control:
Do you fly at an altitude of 80 - 120 meters? This is exactly where the potential of AShot is revealed, as it allows you to take pictures more often and fly faster. Therefore, the area is significantly increased.
When shooting a forest or high buildings, you need overlap - 90% and 75%.
In this case, you need to take more shots. More often than once every 2 seconds.
We also did a lot of work to get the AShot sends of a photo event timemark in the middle of the exposure (shutter) for each shot without delay.
I agree, you can fly without all this, as well as work as a theodolite instead of GNSS, count on a calculator instead of a computer, etc.
This solution is based on our many years of experience and our own requirements for tools.
We carry out air surveying, and we ourselves operate our equipment.
We are shooting large objects of 20-40 square kilometers and optimize the DJI Phantom 4 PRO with this in mind. We can shot 15-20 square kilometers per one day by one pilot with one DJI Phantom 4 PRO.
GCPs
To control accuracy, they are necessary, because you can not do the work without being confident in the result.
Also, the problem is that the DJI Phantom 4 PRO focus may vary slightly, and it needs to be corrected. Focus mainly influences height determination, and 1 or 2 GCPs are enough to correct it.
Check accuracy.
Having calculated a dense cloud of points, we measure the coordinates of any point and put the coordinates into Javad Triumph-1 and make “take-away” in field, getting true data errors on the ground.
With your flight height (100 meters), the pixel size will be better by 1.5 cm and the accuracy of the result should also be higher.
We can make a test flight with your flight parameters and send you raw data and results.
Now we are getting somewhere. I knew I would have to dig a little deep because this kind of accuracy is not common and not allot of people even know what to do with it. If you use the gear yourselves then why don’t you test the product under realistic conditions? No one cares how far you fly, but how good the data is from your flight. Those overlaps are barely good enough to stitch an orthomosaic, but that explains how you were able to cover so much ground so quickly and unfortunately with those stats I can’t believe any of your accuracy claims. With those overlaps you are only going to get 6-7 images per tie point and the vertical accuracy will suffer greatly.
I am glad we are getting to an understanding on the field verification end. What you call a “take-away” we call a stakeout.
Thanks for the banter. I am excited to watch the video and try to install mine this weekend!
I thought that the level of accuracy can never exceed the GSD (ground sample distance). I think there is consensuses that you can “typically” expect about 1-2x the GSD in horizontal error and 2-4x the GSD in vertical error. For 500’ + that would be over 10cm horizontal and 20cm in vertical error. That is what I have read that survey professionals are getting with a p4p and a refined workflow.
For manual marking of identifiable control I now expect most of my error checks to be no worse than 1x GSD and mostly below. But only after using one control point to calibrate against. @VanavaraDigital is correct about the P4P camera focus. it needs to be accounted for every time it pulls a new focus by varying the focal length parameter f in processing. (I’m not sure yet about the first radial K1; I don’t think it’s stable either.) Once you set f on a calibration point the rest of the flight checks should be good. 2x GSD error for height spot check is towards the upper end of what i’d expect for a bare, well textured surface where the dense cloud generation process seems to work well.
hi @VanavaraDigital,
based on my experience, your accuracy numbers seem reasonable for manually marked GCPs. Based on the speed, height and sidelap, the area they covered seems to work too. But like @michaelL I work in a country where 170m flying height is a big no-no. So 30ha per battery is about it for me.
I did download some photos from your client’s project to process and test ashot’s timing accuracy. They seem quite crisp despite the high UAV speed and exposure values. Unfortunately your client’s apparent allergy to sidelap (20-25%) prevents me from processing and testing how I normally would. the geometry seems too weak to provide a robust processing solution for camera stations to test against. Though when I finally receive my ashot, and provided I don’t cock-up my P4A or ashot during the installation, I will give a report on my findings.
Have you tested what happens if you give the command for ashot to start shooting when the P4 is being controlled by Map Pilot? does it override Map Pilot’s control or does something else happen? Could you program it to ignore Map Pilot’s commands and control the camera interval itself?
Yes, we tested this.
If Map pilot will make shot - Ashot will send Timemark to GNSS.
If you will activate AShot interval shooting, and mappilot will make shooting - you will have a lot of photos and the same quantity timemarks.
No (((
Because DJI Can Bus is not stable. It will be not good solution. Sorry.
If i understand correctly, you will have all ashot interval shooting pictures PLUS Map Pilot’s interval pictures?
What if ashot trigger and Map Pilot trigger happen to occur very close together like a few ms? will you get a skipped photo on account of camera busy error?
Photo will not be skipped.
AShot is waiting for the camera to become free and at that moment take a picture.
well this sounds like it will work just fine for me as I am sick of skipped photos with Map Pilot. I’d rather have a few extra that I can ditch rather than missing photos, and I can keep my Map Pilot terrain-aware flying.
What is the minimum interval (approx.) that the P4P camera can shoot and store pictures before the camera is ready again?
We tested interval 0.8 sec. But stable interval starts from 1.1 sec.
Hi, thanks.
Here you may download source data of project without installation of any software:
https://yadi.sk/d/zNr33HXZ3pLrgg
We are tired of it in DroneDeploy as well so we pretty much know at this point that it is not the software, it’s the DJI SDK.
Thanks!
My ashot experience.
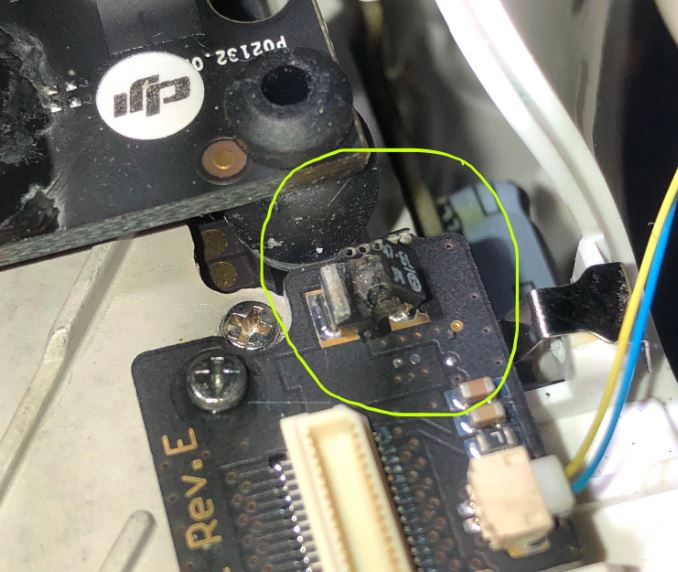
Some months after ordering our ashot, it finally arrived this week after an ordering mixup. I had the house to myself tonight so it was time to install. Well, I carefully installed the ashot board, reassembled the Phantom and turned on the battery. And F**K me if it didn’t spit a big spark and let out the magic smoke. The part circled in the following photo has exploded:
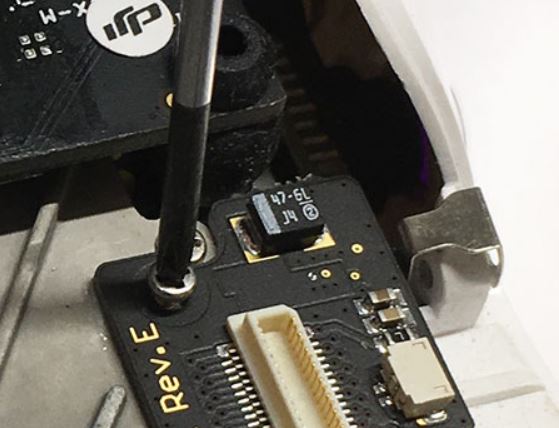
here is what it is supposed to look like:
I don’t think I did the install wrong because ashot still commands the camera to do 1.2 and 1.7 second interval shooting. I presume the ashot board has power in order to perform it’s intercept and command functions, and is wired into the camera ribbon properly, otherwise it wouldn’t do anything. The reach cable was not connected to a Reach M+ and the cable was not shorted at the end I had to deal with. It is too small at the ashot connector for me to test for shorts.
I didn’t test the time mark wire, because quite frankly I’m not inclined to. I just don’t want to know about it after waiting months, and then wasting several hours of my life with this. Power to the reach unit was half of the deal and I don’t have it so I’m not plugging it into anything else. I’m also lucky not to have trashed my boss’ P4A; you can see some burn marks on the adjacent board to where the ashot component exploded.
I assume this board was tested prior to shipping. So, what happened, and where to from here?
I am very sorry for what happened.
We learned about this issue last week. The problem is a defective capacitor.
He burned out at you.
It can not damage the drone. Ashot has a fuse for this.
On Monday, we will get a new batch of boards with other capacitors. Check them carefully and send you one by express mail.
Once again, sorry for what happened.