We have just pushed a fix for “not getting float/fix in kinematic mode”. v0.0.2 is out there, available via update in ReachView. More fixes coming soon.
1 Like
Thank you very much
Hi Egor
Phones, what can I say. I was able to get Float with the latest FW you posted. Will attempt to get fix in a large field tomorrow. Look forward to bug fixes as well.
Thanks Igor, updated and about to test. Also, I have looked again at the documentation and can’t finding details on how we connect our reach modules to different WIFI network. If I call up the reach on port 5000, it simply displays the Network name and IP address. What is the procedure to to start a scan and look for another network ?
I don’t believe there is any at the current time. I was going to add this as an issue or something like that on GitHub
Finally!
Great, Thank you!!! 
Edit: I see you haven`t implemented GPS receive strenght status for the base yet(?)
In addition to this, when will the update come in which Base coordinates will be automatically obtained?
Automatic base coordinates and sats levels on the base are a part of a larger update coming soon.
Kyle,
On boot Reach will look for known networks to connect to and if it doesn’t find any will switch to hotspot mode and expose wi-fi selection interface. This is how it is implemented currently. We have plans to add more flexible network settings to the app.
Hi Egor,
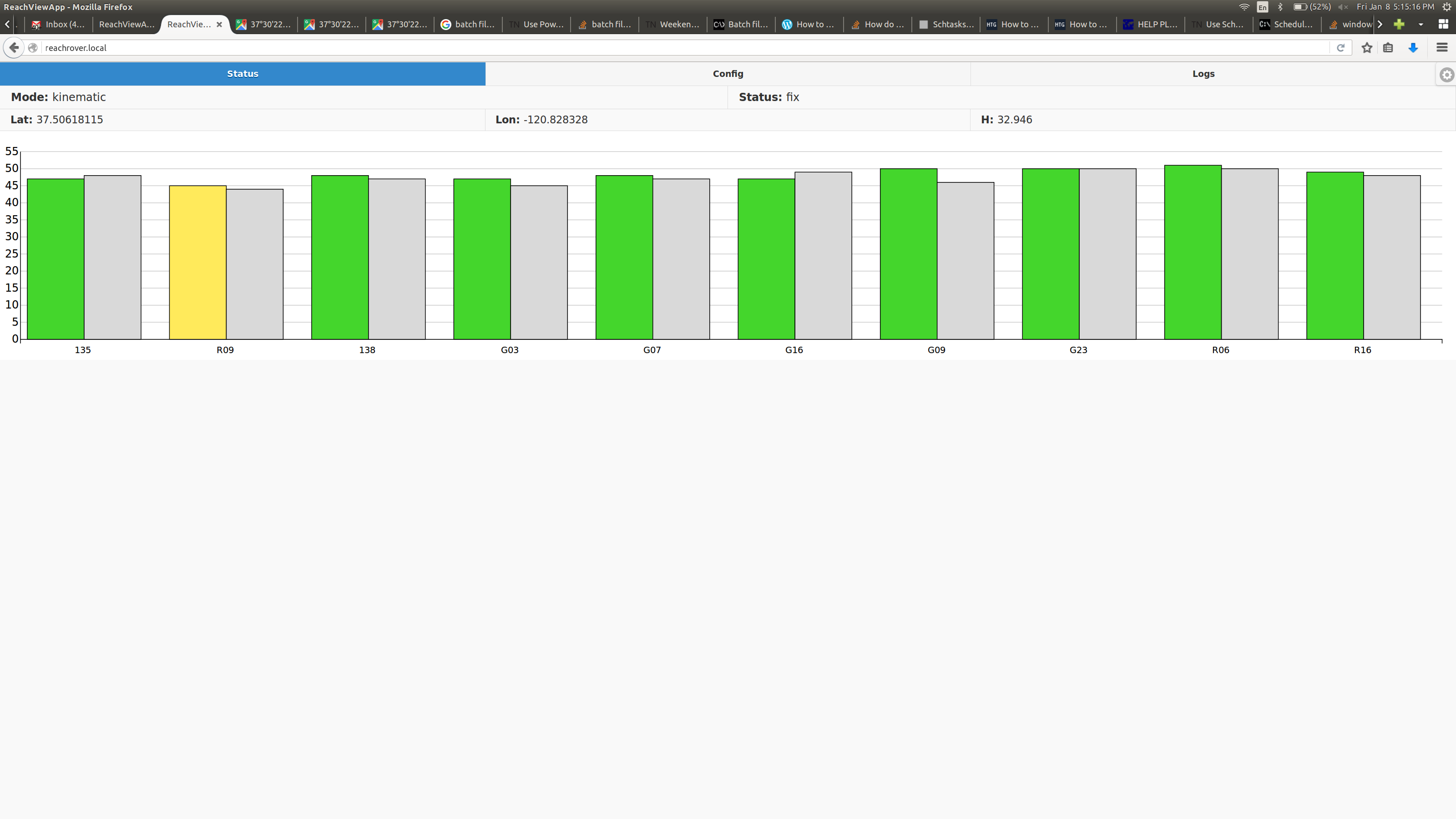
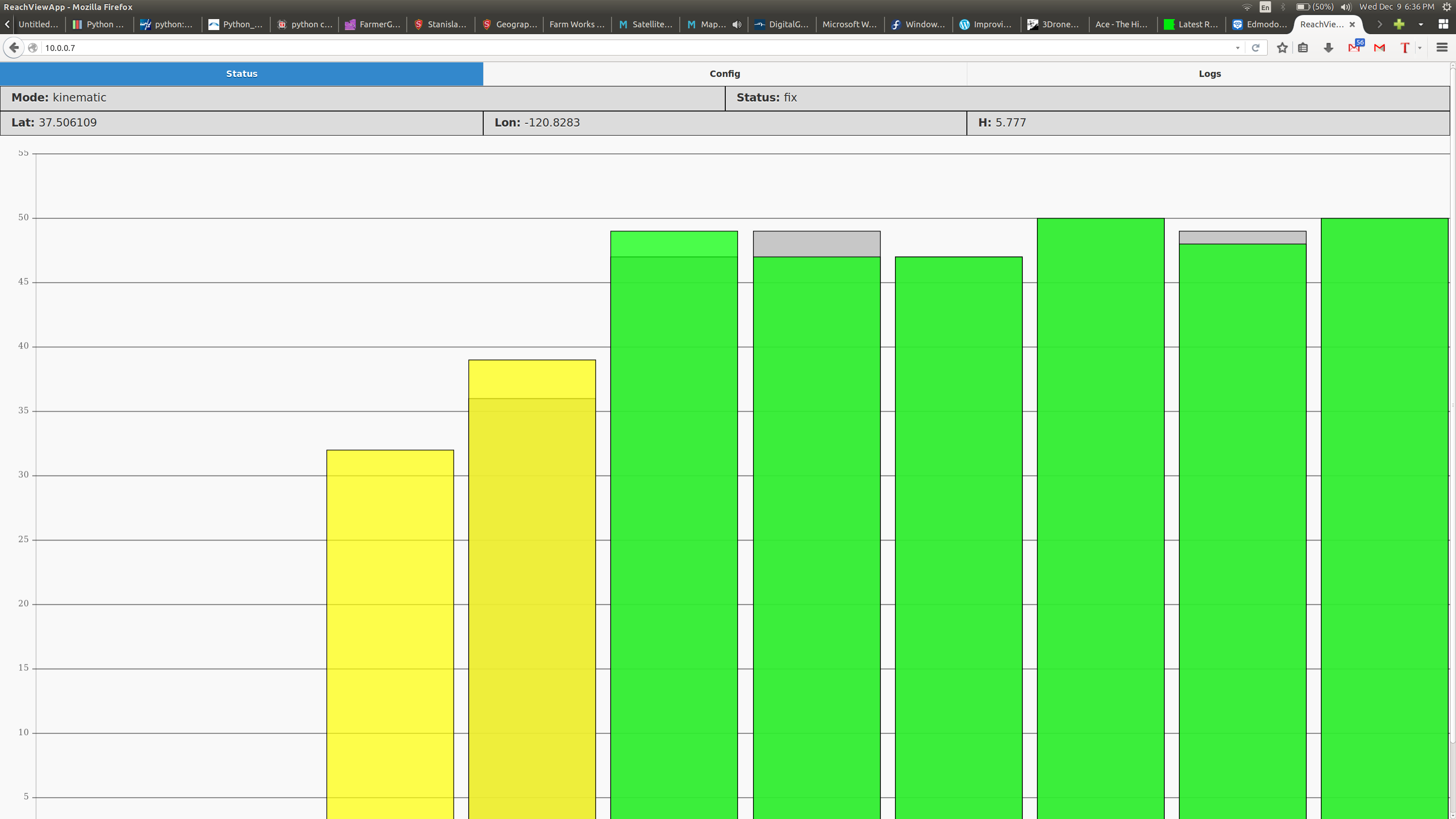
I was able to get FIX this morning in the large open field. I was using my phone’s hot spot, and got this screen shot about 30 minutes after Float. I’m using the BASE TCP server to send the correction data to the rover.
I shutdown the Rover and Base, then powered up to test the reconnect time, about 10 minutes.
Walter
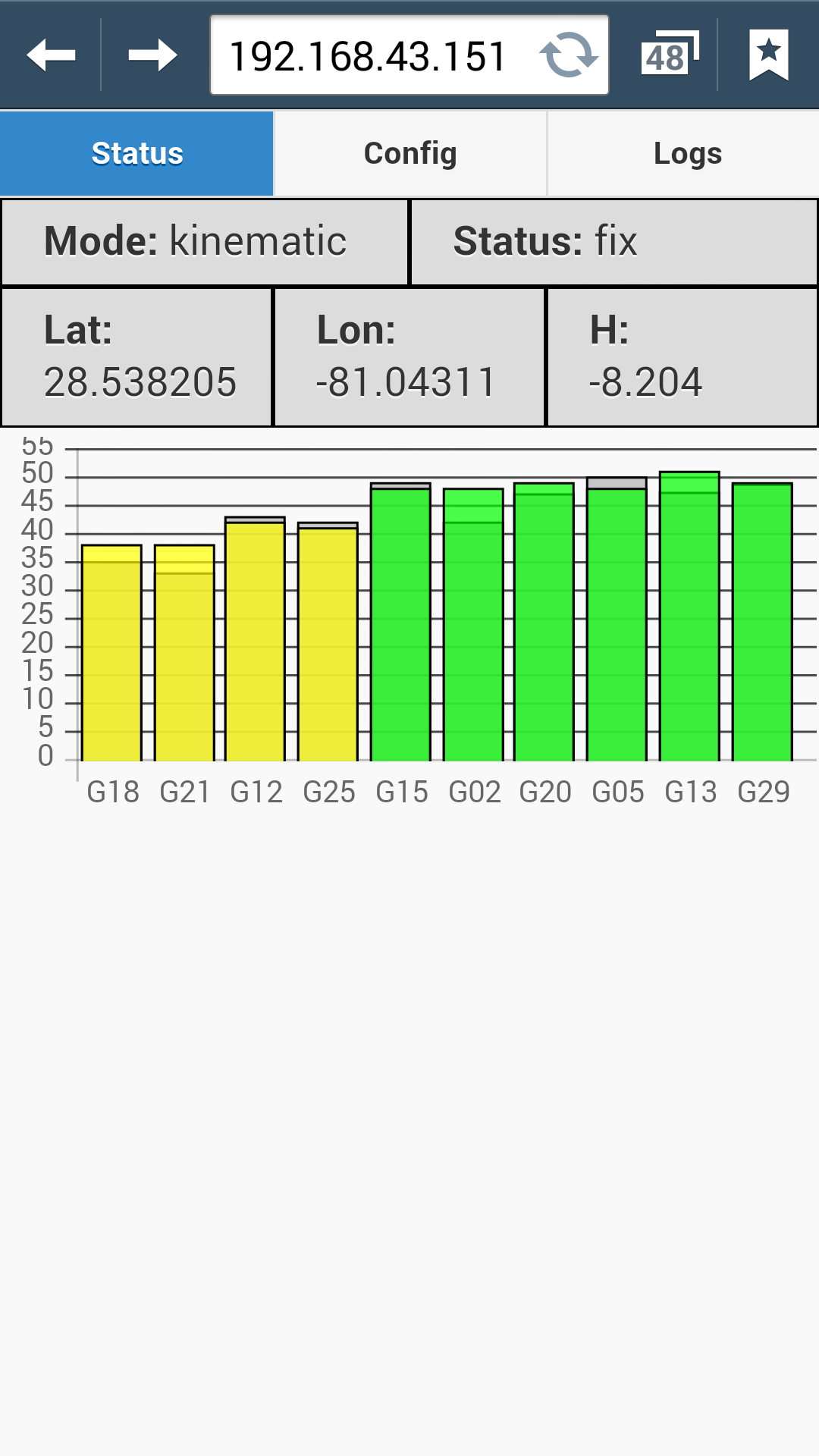
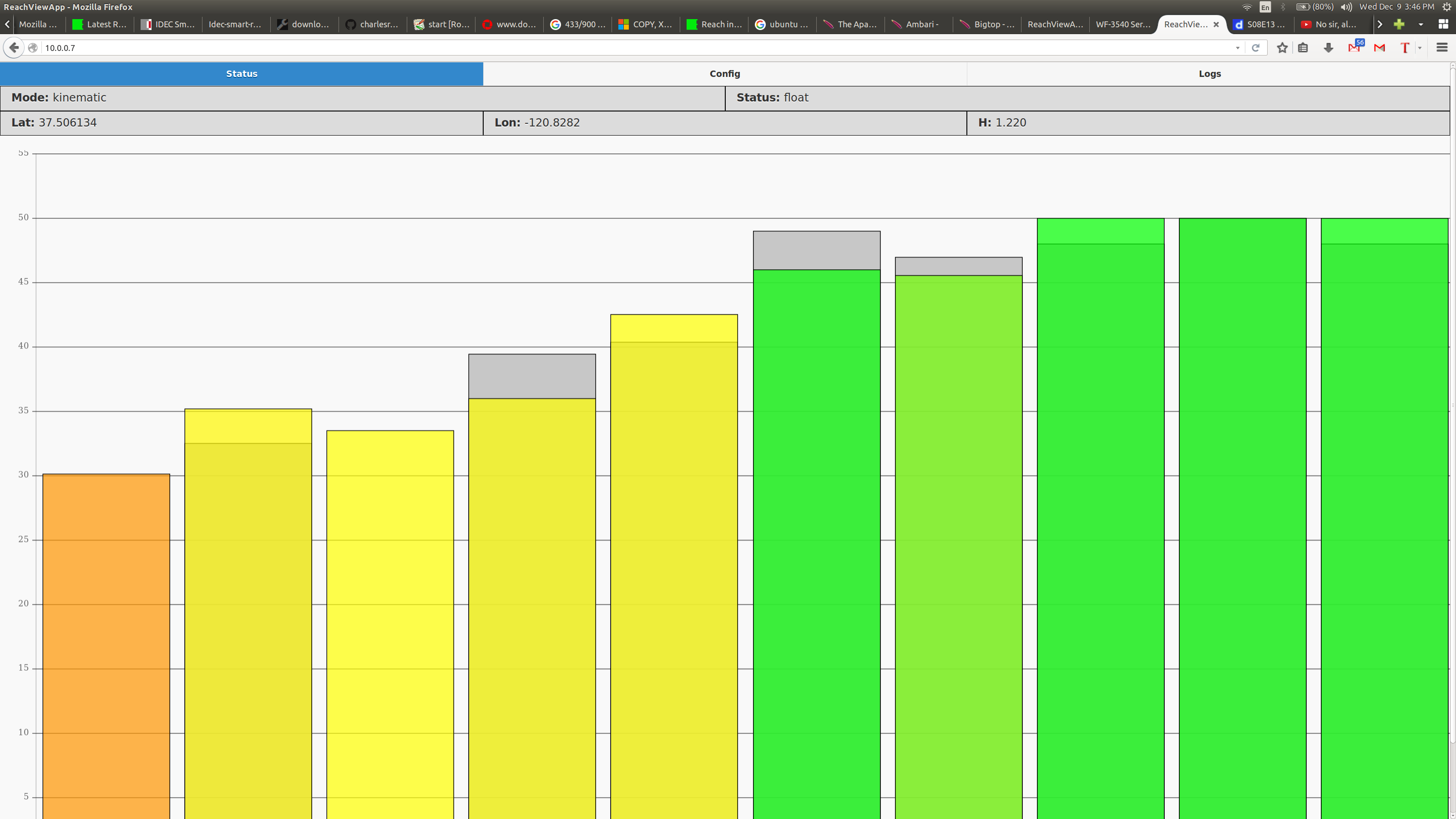
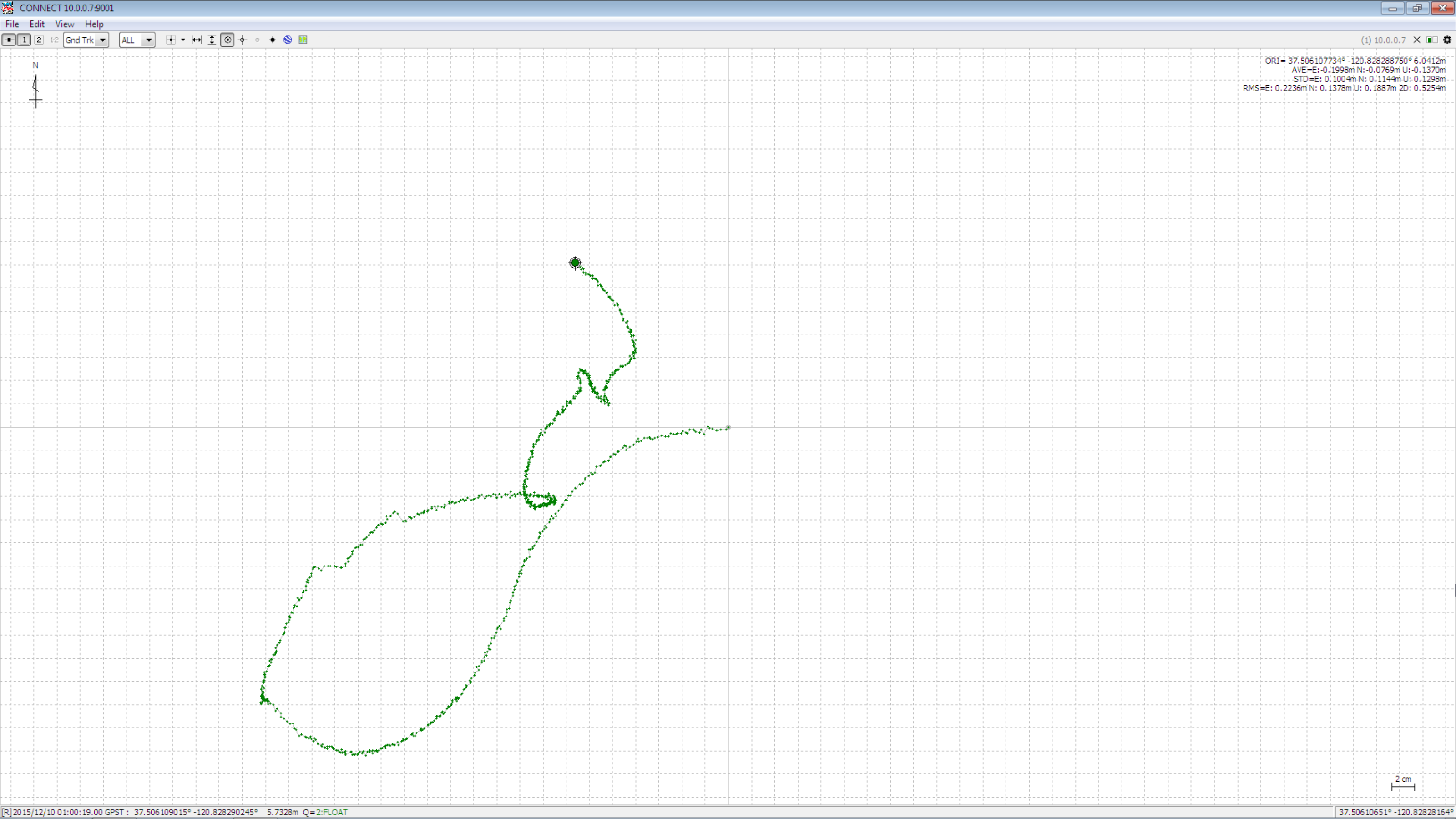
I also got a fix yesterday evening late, I wish my virtual machine wouldn’t have crashed so I would have been able to see the graph in RTKPLOT… Float seems to show up in 3-5 minutes, and fix came as soon as my 6 satellite bar held steady for a short while. Sometimes, it will not float, I have to stop either the base or the rover for a portion of a minute and then start it back up again for it to work.
My float:
My fix:
Good Work Emlid!
1 Like
Perfect! Thank you for your reports!
As soon as we add Glonass and Beidou support time to first fix and fix availability will improve.
Ok, That is great… I’ll be waiting for it!
Hello lgor,
I have got the Reach ,after I press the “update” on the ReachViewApp, I can’t get in the ReachViewAPP any more.Can you help me?I can using the ssh get in the Edison,but cannot useing the App.
Thank you!
Make sure you are using the IP address, sometimes the reach.local doesn’t work. It may work for you.
Yes when I useing the 192.168.42.1:5000,it works.But the IP addres 192.168.42.1 doesn’t work!
Ok, your problem here is that after you connected to the reach shelf-hosted network and entered in your wifi settings, then clicked ok, the Reach rebooted connecting to your router’s network. Scan for IP addresses on your network which the Reach is connected to and find the one which is the Reach module. That should work for you. That IP, 192.168.42.1 is the Ip address the Reach uses to identify itself on its own network, not on your home network where most likely you have automatic DHCP set up.
Stupid question - has anyone in the USA been able to get a fix with reach. I have had no luck. Same results with Piksi. I am beginning to think that a low cost usable solution to cm level accuracy is a utopian dream. Please tell me I am wrong and someone has managed to get things to work RELIABLY.