Please give us a little more time, we are doing our best to release it as soon as possible. Yesterday, testing showed some issue. We will post a detailed changelog once it is done, in short what is coming:
Reworked the base back-end significantly.
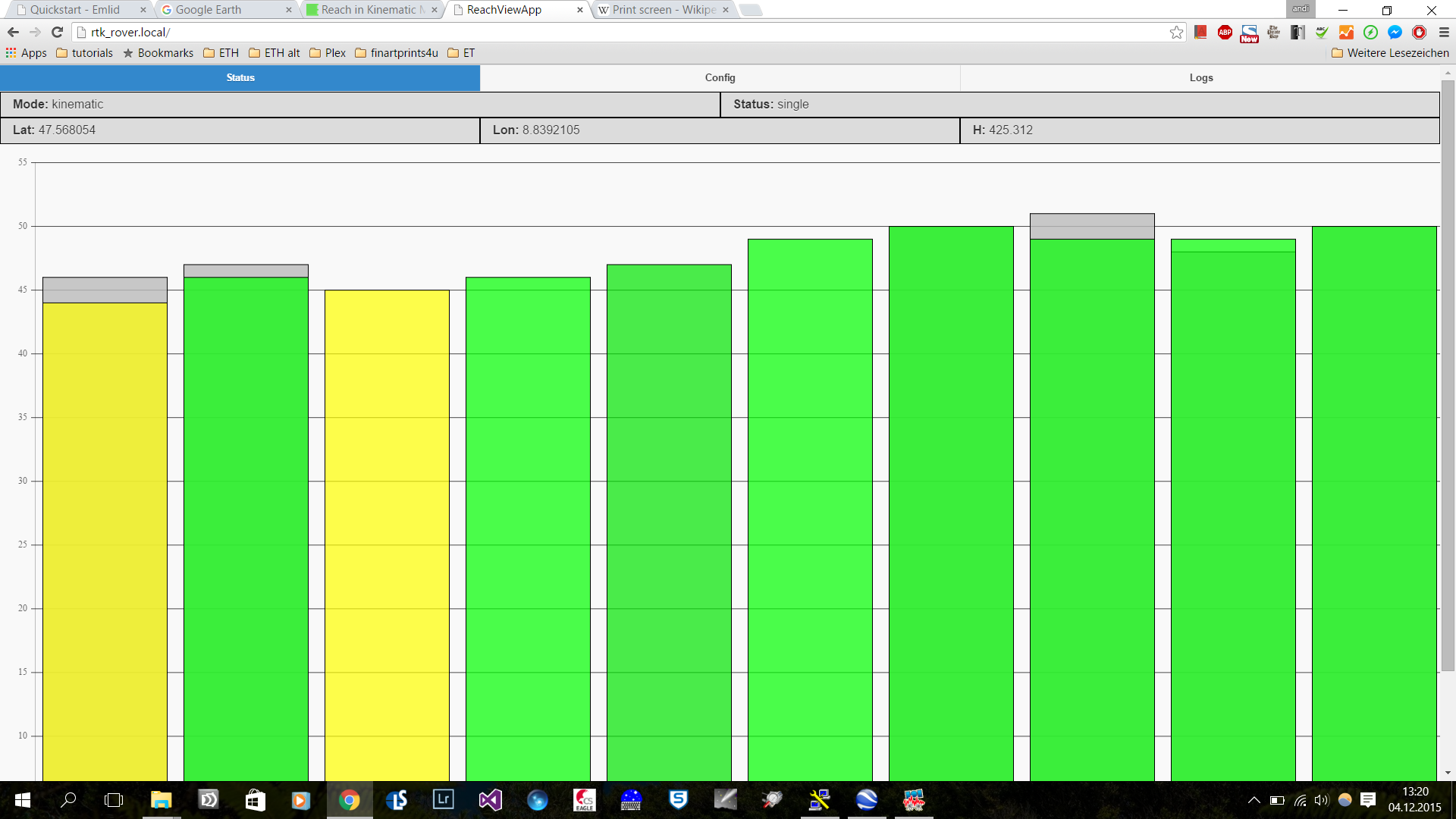
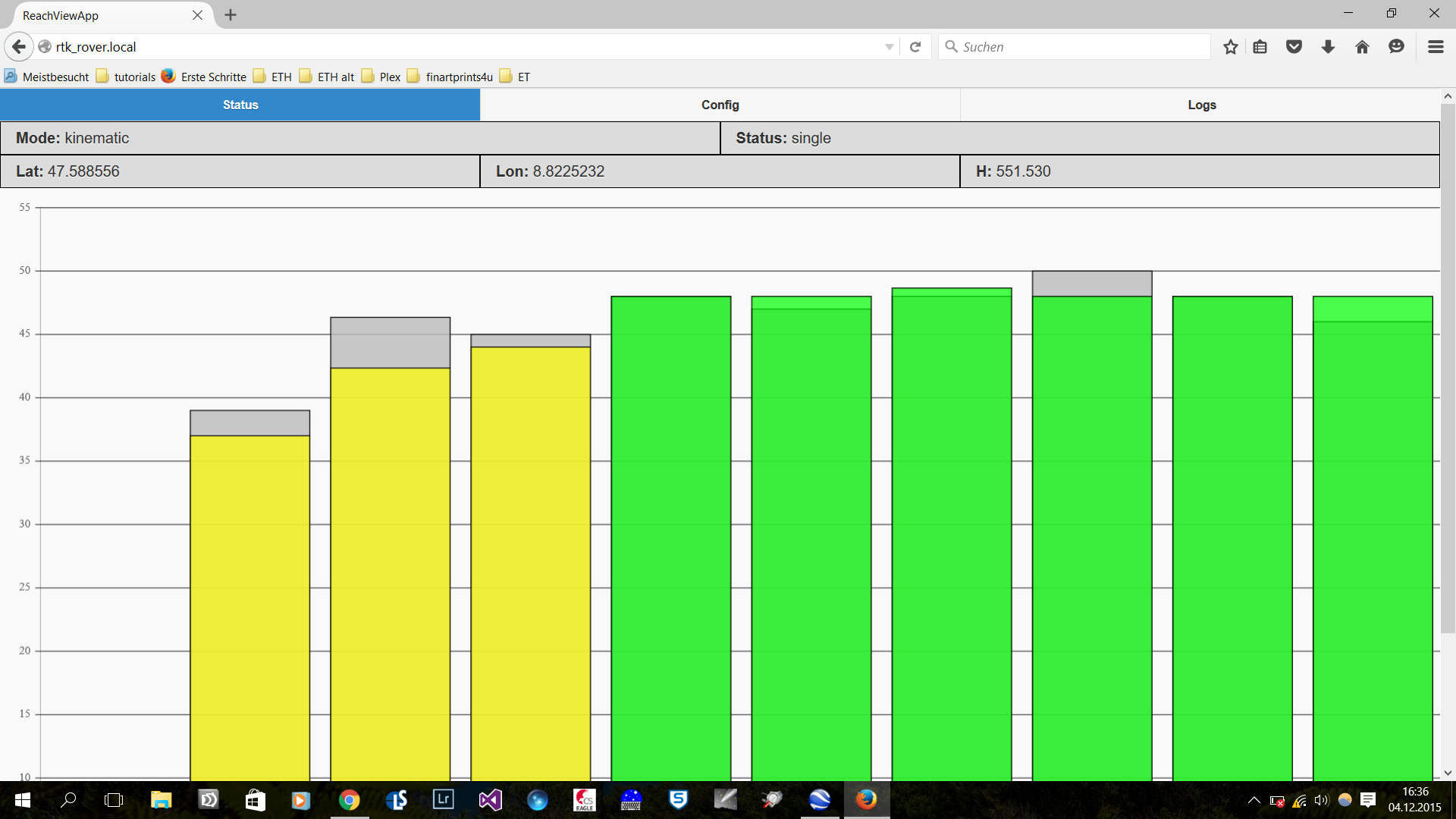
Base now shows sats levels
Base can calculate its single position and then broadcast it in RTCM, so you do not have to enter the base coordinates unless you want to.
Base and rover now can work in GPS/GLONASS and GPS/Beidou modes, with adjustable frequency of solution.
Improvements in update process:
“Update” button has feedback and check if internet connection is available
Detailed version info
Updates moved to a new tab fixing the weird placement of the
function
Updates will be delivered through update function in ReachView app.
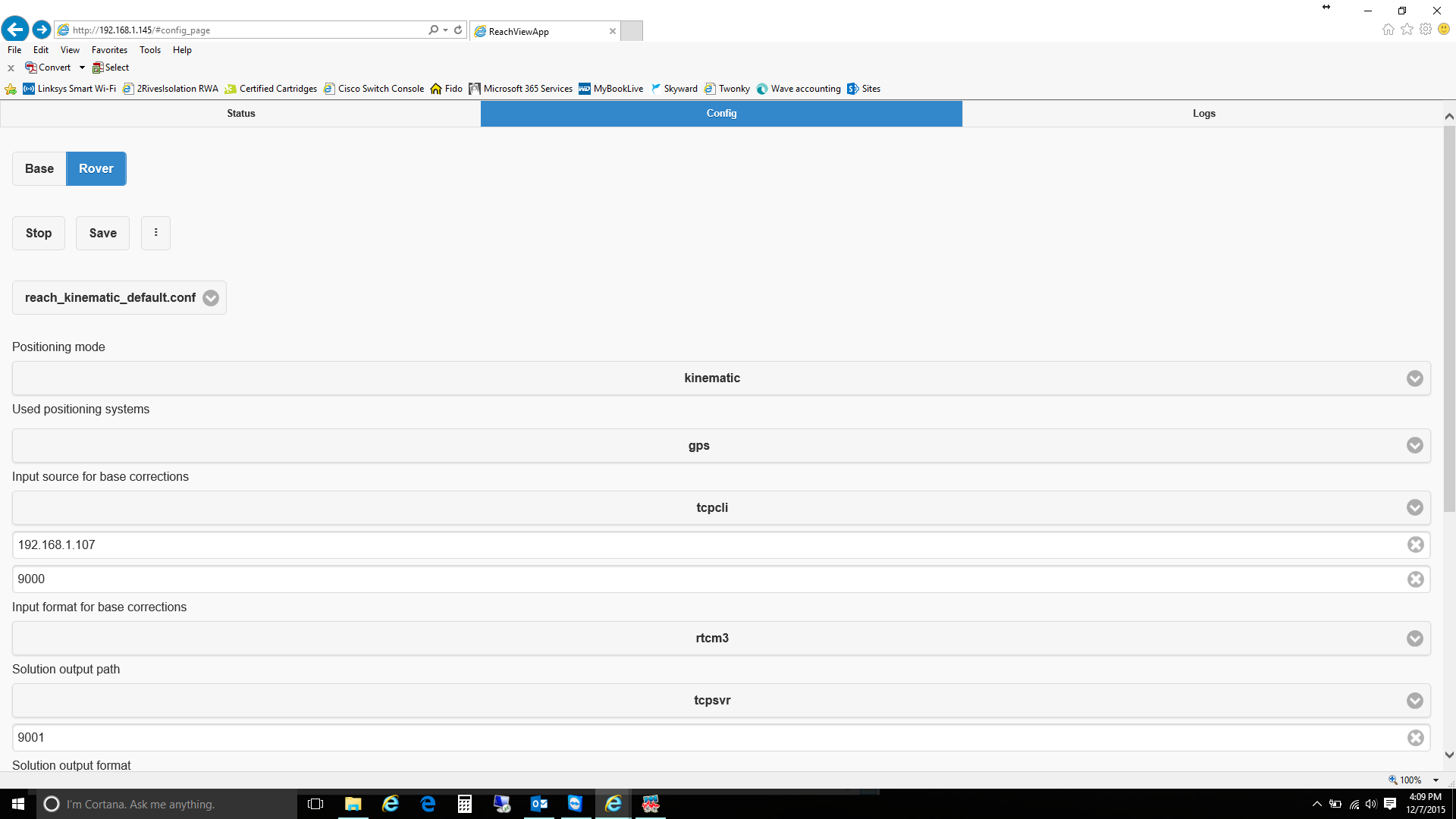
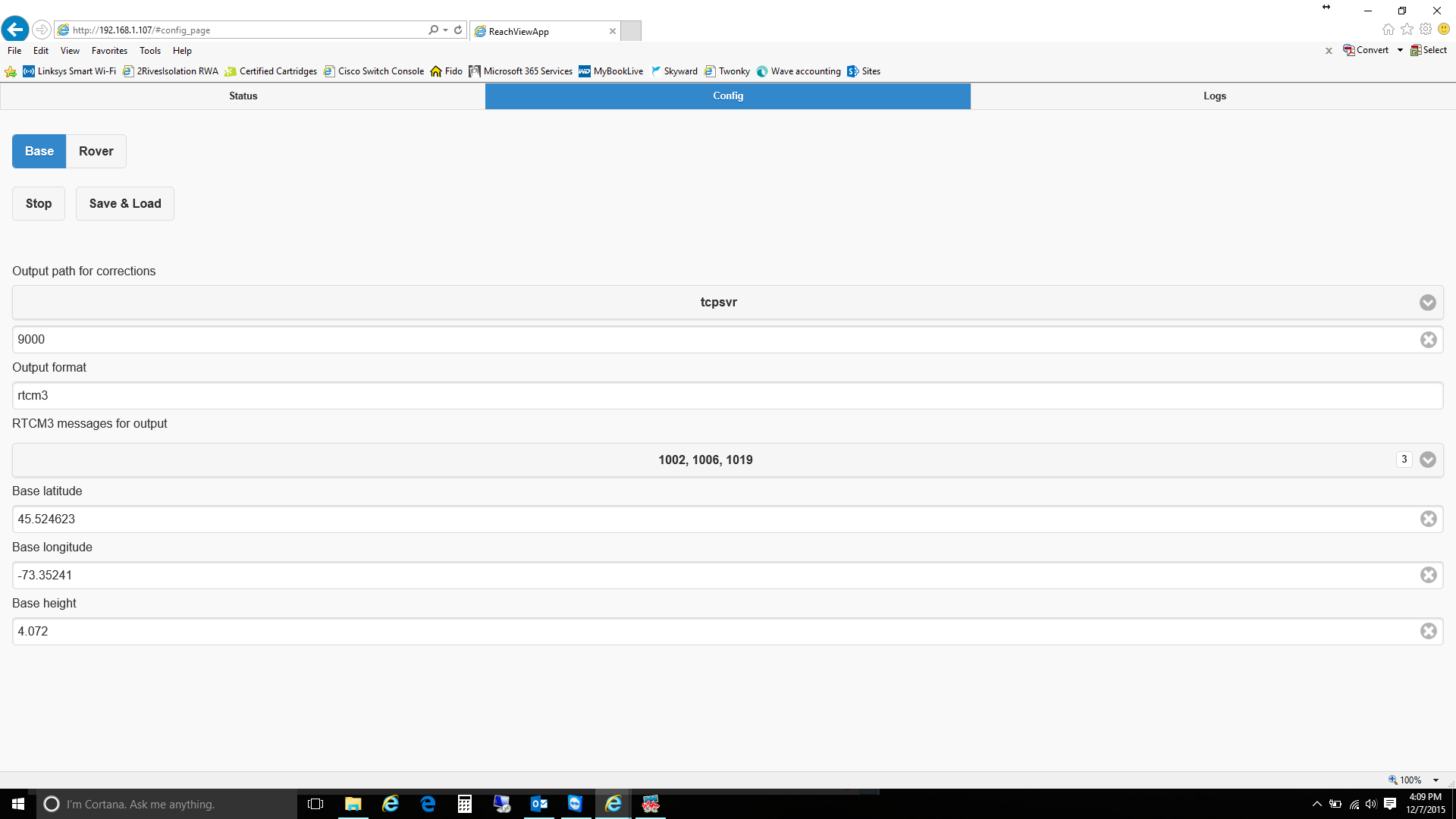
In base config there are 3 field with names “Base latitude”, “Base longitude”, base “height”. In short this format of coordinates is called LLH. Now you need to enter an approximate location manually, with next update base will get its approximate position automatically. You will still need to enter precise base coordinates if you want your rover to have precise absolute position.
If you did setup Reach one time it will remember its state and resume operation after reboot. Logging of raw data will start automatically. You can then connect to Reach hotspot/network to download the logs.
Clever move! We are automating this process and it should simplify things significantly.
By default .log files store raw data. If you change “Solution output path” to “file” you will see an additional log created, that has “Solution” name. If you download it - it contains coordinates and precision data.
I also get multiple satellites but no “fix” or even “float” status. Some of the bars have grey markings for the base, but then some show nothing at all. Does that mean the satellites have the same reception for base & rover or does it mean the base doesn`t see them?
To avoid confusion, couldn`t you set up a section for release notes in the wiki where you list up all the update version as they go public? With a small list of all the changes, required actions, bug fixes and new features. Kind of like they do it here: https://github.com/diydrones/ardupilot/blob/master/ArduPlane/release-notes.txt
You then could also give us the option to go back to a previous version & enable beta versions for early testers. Again, like Ardupilot does.
Is there any way I can post-process the log I have now? Some utility… or something like this. I really would like to take a look at the log I recorded previously.
From what I understand, you can use RTKLIB to process your data. You will find that some of the wording in RTKLIB is familiar as it is running on Reach already albeit in a stripped down / modified version. We have post processed successfully with using a NVS chip in the past but its very tricky to get the settings exactly right for your combo.
Is there anyway you could share your raw logs with us so for those that have not yet received their Reach units can have a look at the data?
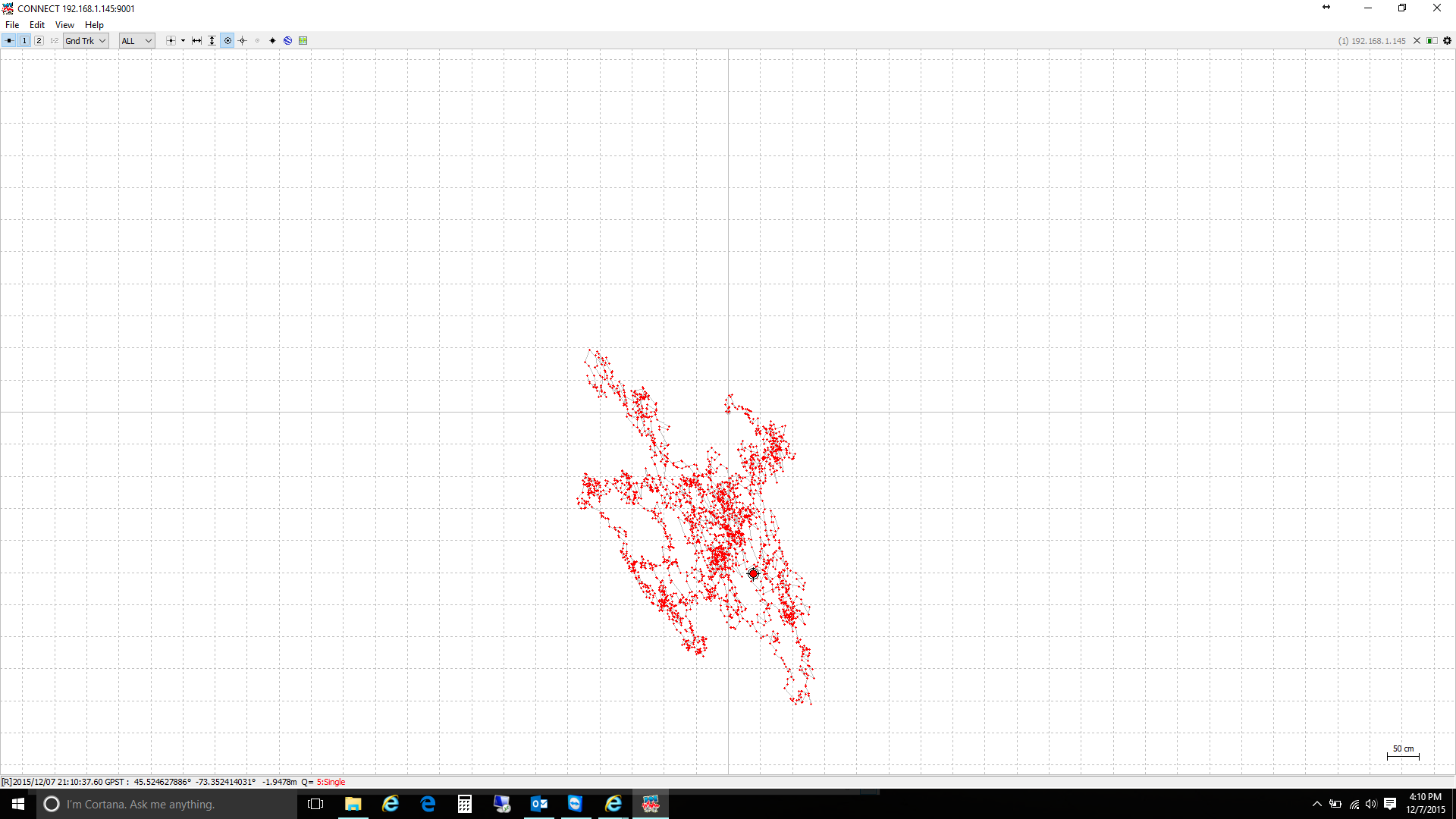
Sure, this log file is on single mode, I wanted to see how accurate it was on it’s own, so that’s what you’ll find there. Also, I haven’t jet been able to get a fix or float yet, but I am confident that it is close, I need to move to an area that is completely free of obstructions.
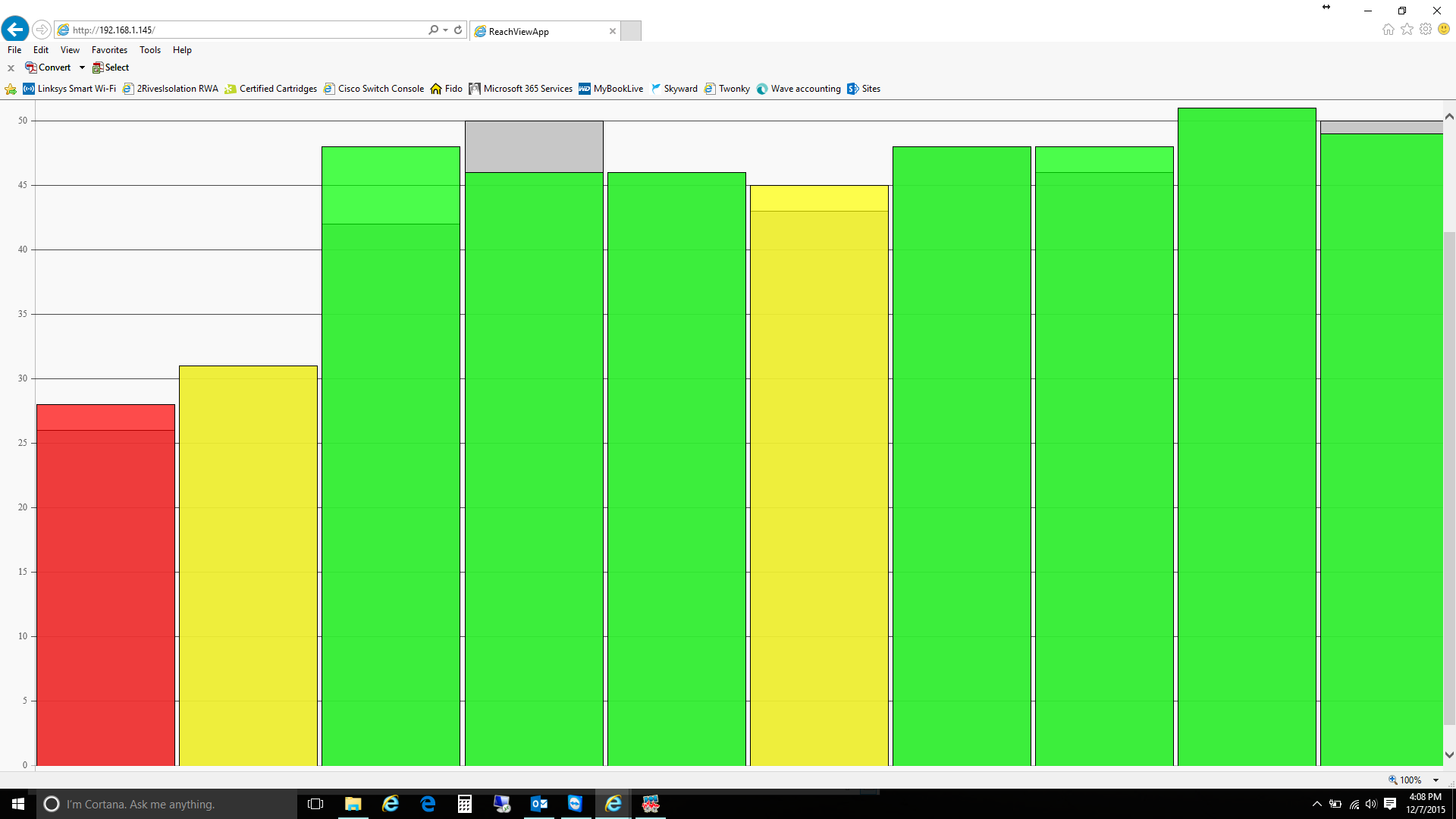
I do believe as well that I can do this with RTKLIB although I have no experience with it at the moment. I have used RTKPLOT a bit so see my deviance, I am getting about 3 satellites of about 45 power and no more.
Here is the file, it’s from driving around town, I’d like to see if it stays on the sire of the road that we were on… That type of thing: https://goo.gl/PfWaTl
To post process, you need the Base log as well as the Rover log. Obviously they need have measurements from the same period. Can you supply the Base data or from a nearby COR if you have?
Weston, your base observations appear to be empty. The file sizes of the base and rover should be similar assuming you are collecting at the same rate. Could you try again?
I was able to get fixed solution for a bit and my battery pack ran out. Recharged my gopuck pack and plugged everything back in and one of my reach was not accessable anymore through the webapp. I had to reflash and was having quite a bit of problem doing it. tried using the Intel flash tool gui (didn’t work), eventually got it to reflash by cmd bat file. I luke I will try to get log file and will post it. Perhaps we can find a way to post process this and figure out how we can geotag as well.
If anyone else has experience with rtklib that would be great. I am trying use my flash sync connected to the event port to log the exact time the pictures are taking.
All I have used is the flash file, flashall.sh, or flashall.bat in your case. It looked the simplest, and so I did it, although I do favor the terminal. What exactlyd ud you do to get a fix?
the setup was exactly as the instructions but instead of 5 sat I got the fix at 6 sat. After that I had the problem where my battery died while I was trying to get my log. I charged my gopuck battery pack and then tried again and that is where I could not access the reachapp one one of them, so I re-flashed it and now its ok, but no RTK fix.
So far this reach seems to be pretty far from reaching a fix. lol
We did lots of testing today based on the issues that you have reported and were able to reproduce and localize them. We are working to resolve them as soon as possible.
It will take us several days to release hot fixes and more stability improvements will come within next weeks.
All the feedback that you are providing is giving this project a serious boost, thank you!
Ok, this is good. I have been having a lot of cloud cover here recently and it has been affecting results, as well as the trees around which are as well. In RTKPLOT, the position mover around in between the 5-6 meter range, nowhere near RTK that I would expect.
Igor,
Glad to hear that you were able to reproduce the issues we have here. When will the next ReachView update come as well as new Edison Firmware?
Addition: It seems that entering Base coordinates lowers my signal strength overall, I am not sure why this is happening. With base coordinates entered, it lowers SNR levels probably about 10 all across the board.
Also, I was trying to stream the base station coordinates out of the Rover in llh from under the Advanced options menu so I could view them in RTKPLOT, I discovered that both points are overlaid on each other, how exactly were you able to produce the diagrams on the campaign page, I suspect it was with the same utility. I am guessing that something is going wrong here, possibly not trying to deferentially correct, I have on average 4, sometimes 5 satellites where I am at currently.
Another question, what GNSS satellite systems does the reach uses, the campaign page gives a list, excluding Galileo, It seems that I would be able to get a fix because of these other systems, with, I would think, more satellites in the sky than the average 8-10 from GPS.
We are working to deliver it as soon as possible. We will try to push an update until the end of the week that will address many issues including the “not getting float/fix”.
New Edison image will take longer, hopefully end of next week. I will make sure to keep good communication about how things are progressing.
Weird. If it still happens after we release the update let’s get back to this question. Never noticed anything like that.
I am not sure if I understand the problem. Maybe you can start a new thread with more info / screenshots?
On v0.0.1 we do not have option to use anything except for GPS. In next version Glonass and Beidou at selectable rates are added. Galileo is not yet supported by the receiver itself, but they promise to release a firmware update once the constellation is complete. Adding Glonass/Beidou helps in RTK significantly.