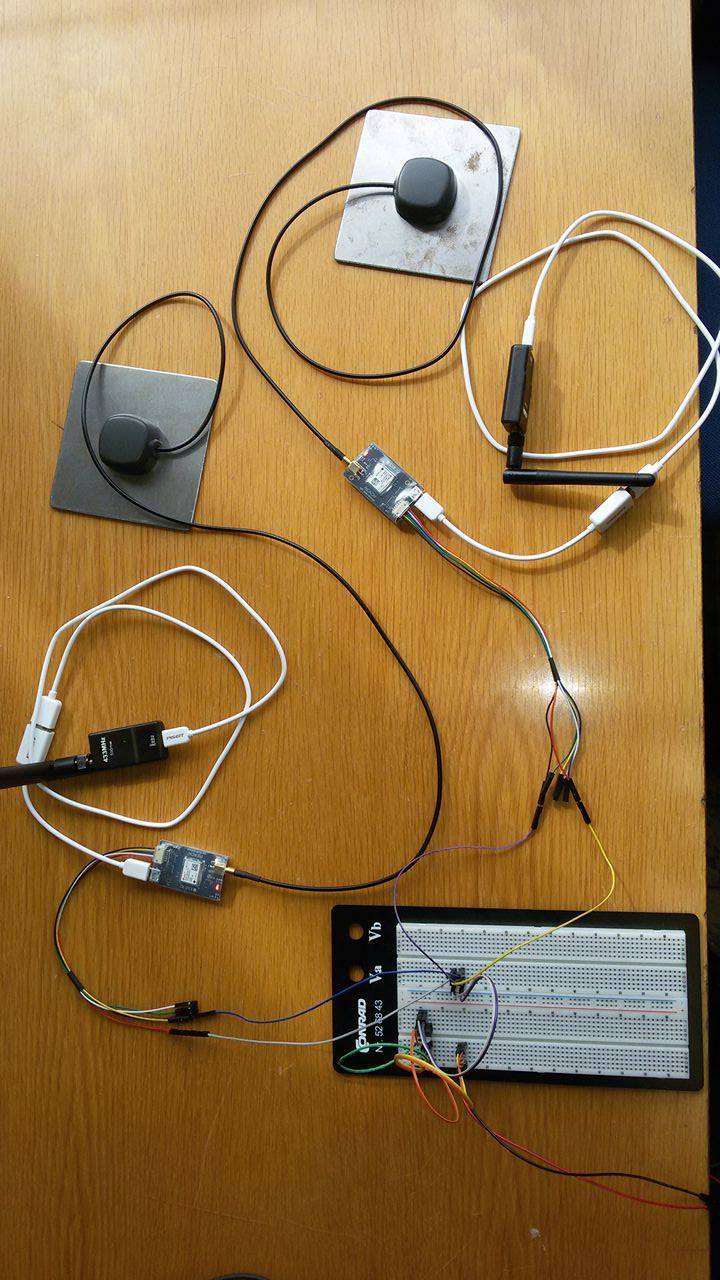
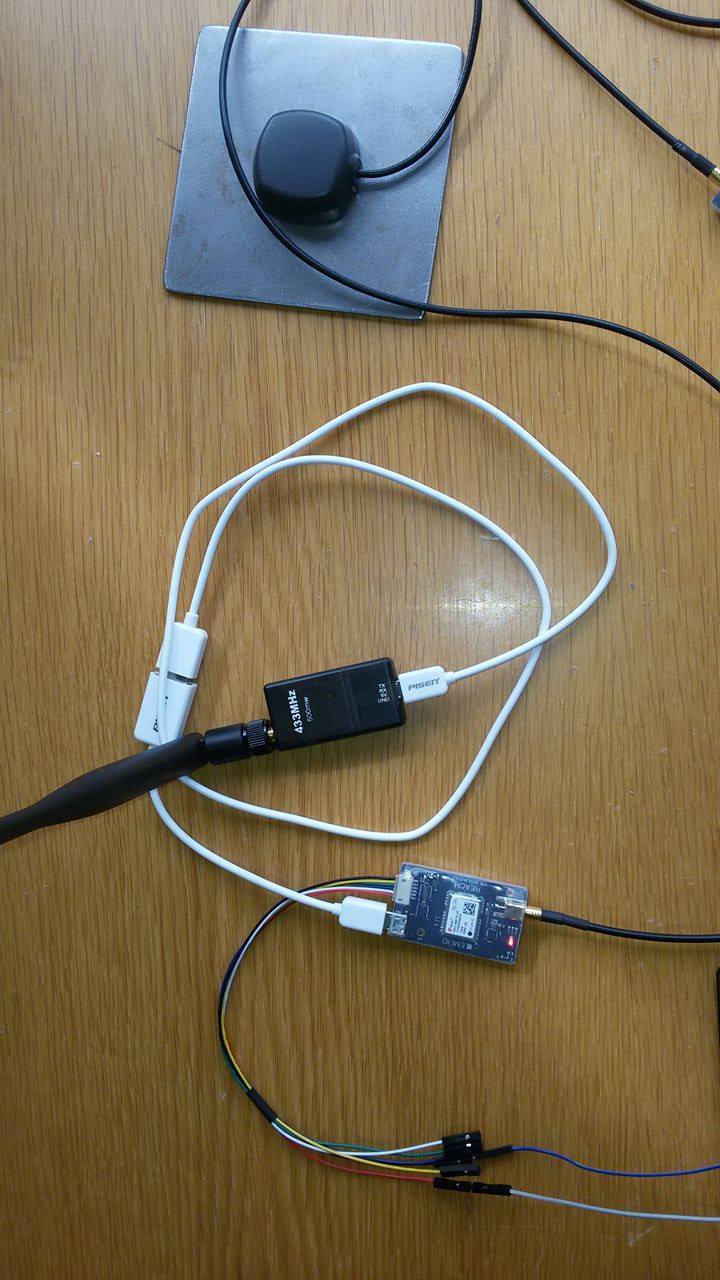
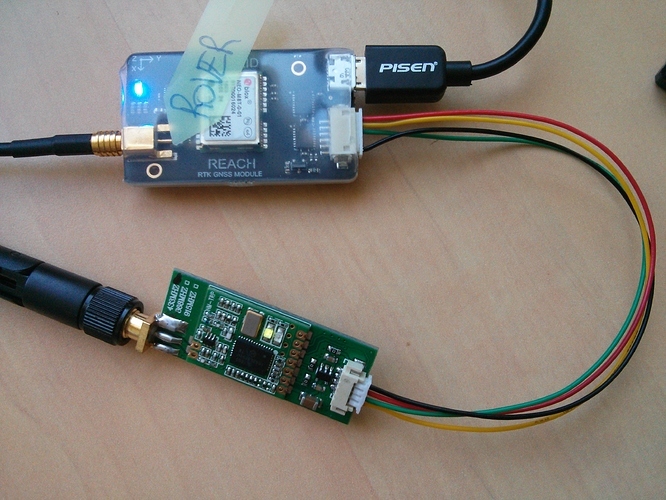
We succesfully use the reach with rover-base communication over wifi. Now we would like to use it on the field where the rover has no access to the network. We have two 3dr radios for this. Both have USB cable (radios are tested and working). We connected it to both the rover and the base using OTG cables. However, the communication does not seem to work. When the rover and base are fully configured and are unplugged, once they are plugged in again, they show red LED fully on.
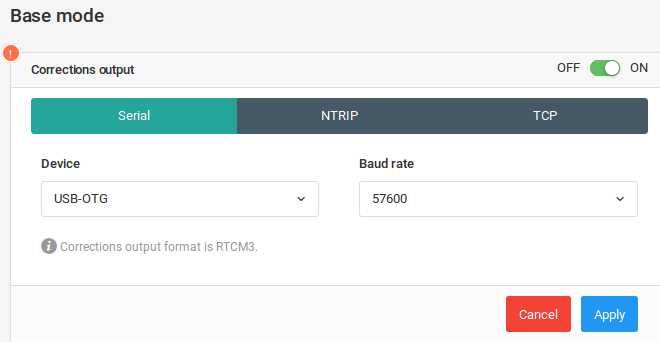
Base:
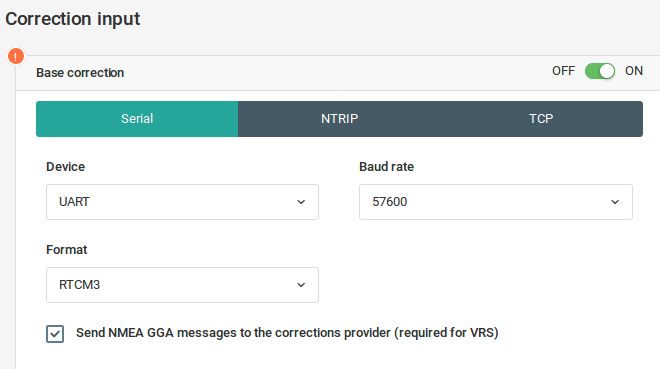
output path: serial
device name: ttyMFD2
baudrate 38400
output format: rtcm3
rtcm3 messages for output: 1002, 1006, 1019
Rover:
reach kinematic default
position mode: kinematic
used positioning system: gps
input source for base corrections: serial
device name: ttyMFD2
baudrate: 38400
input format for base corrections: rtcm3
I checked on baudrate 57600, does not seem to work.
The radio however works when using for pc-pc communication.
Did you use an OTG connection for your base unit?
I think there is a transmitter (OTG: ground module) and a receiver (UART). But to confirm I am not a specialist.
I also increased the power of the ground module to 100mV which was set to the lowest output of factory
One other comment. I just installed my 3dr radios and they appear to be working great but I did run into some irregularities with Reach when I used 5V1a port for my power source. Switching to 5v2a solved that problem. In your case that’s probably unrelated but I thought I’d mention it.