The other PWM ports have the following functions:
Servo1: 34
Servo2: 33
Servo3: 36
Servo4: 75
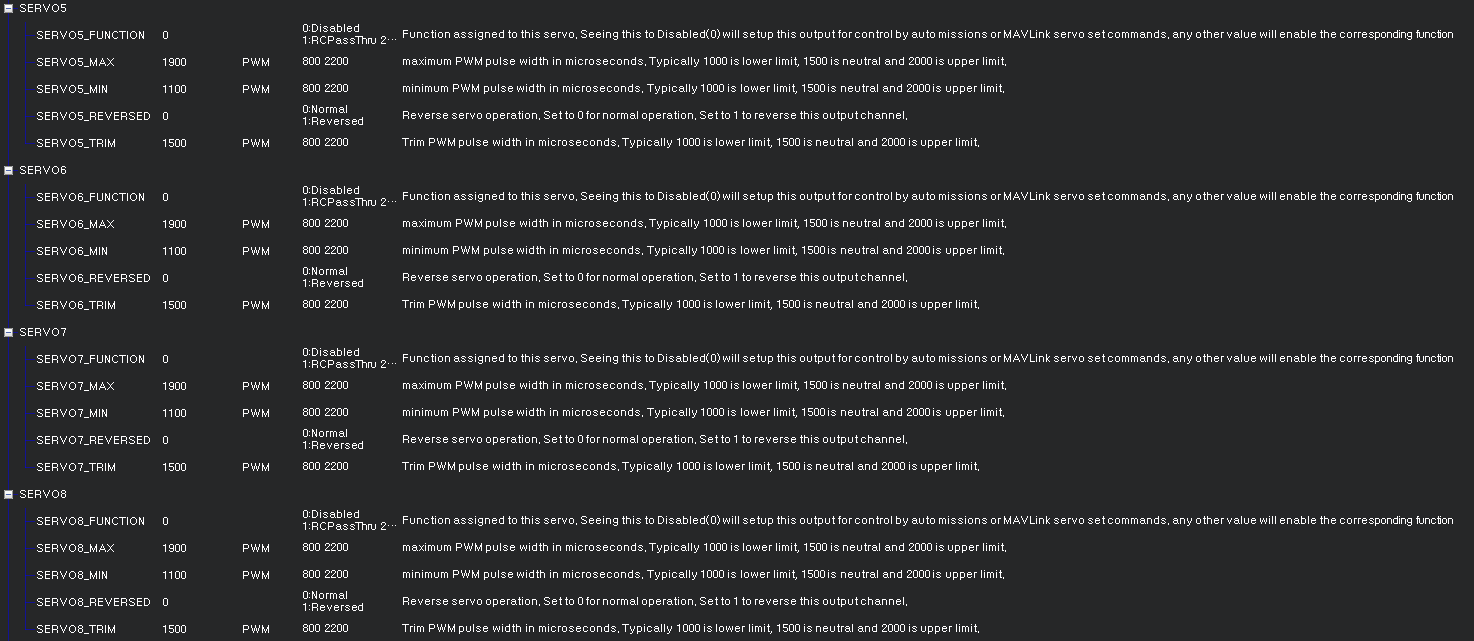
Servo9:76
Servo10:41
Servo11:75
Servo12:76
Servo13-16: Disabled (0)
The PWM pulses I get in channels 1-3 are sporadic (unusably so), as in the image (Notice the 250ms scale):
All the other channels (4-16) are silent, no pulses at all.
SERVO_RATE is set at 50 Hz. I have tried also to disabling the pwm channels as in (here), but no improvement. I wonder if I am missing something on the “disable channels 5-8” procedure.
Hi!
Try moving your servo from channel 4 to channel 5.
PWM outputs 1-4, 5-8, 9-12 should have the same frequency and same purpose (only ESCs or only servos).
I have changed Servo4 to Servo9 and shifted all the others:
Servo1: 34
Servo2: 33
Servo3: 36
Servo9:75
Servo10:76
Servo11:41
Servo12:75
Servo13:76
All others disabled (0)
I have also followed the instructions in this post, once I’m using Q_ENABLE = 1.
Now I get a nice PWM output, but I was forced to set Q_RC_SPEED=50. Any other value makes the problem return. SERVO_RATE seems to have no affect.
I am actually concerned about running the drone at such a low rate. I am currently running the controller at 400 Hz (SCHED_LOOP_RATE=400).
It seems that you still have functions with different default frequencies on the same channels.
First things first, if you have updated to the latest RCIO firmware, you can use channels 5-8 without troubles. We fixed that issue.
Try connecting servos with the same functions on the same PWM frequency channel.
In your config, it may look like this (but not exactly):
I am glad to hear that the PWM channels issue has been fixed.
Is there any resource where I can find which functions can be combined together in the same frequency channel? I’m not yet familiar with Ardupilot`s source code, I can only find the frequency setup of the main motors.
I dont have my board with me now. Once I get it I`ll try it and post the results.
I don’t think you will find any information about “combining” functions. This is someway unique for the Navio2 boards. It is a hardware limitation of a chip that we use.
You just have to have the same frequency on channels 1-4, 5-8, 9-12, 13-14 and you will be good to go.