GNSS Solutions e o TOPCON TOOLS não suportam todas as constelações e também taxa de 5Hz.
Para utilizar estes softwares, seus arquivos precisam conter apenas GPS e GLONASS e ser com taxa de atualização de 1Hz.
Isso é possível com o Emlid ou você não me aconselha?
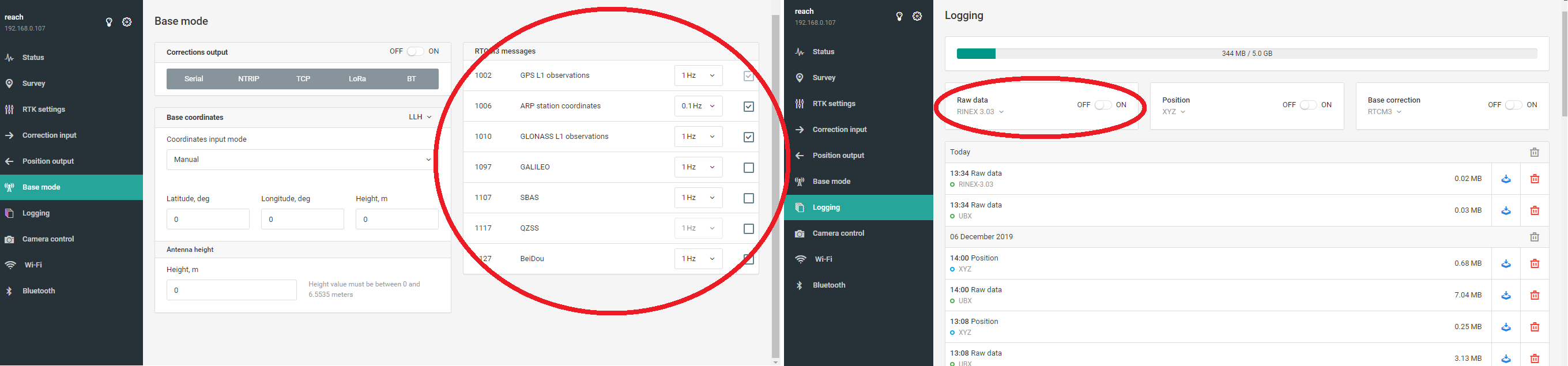
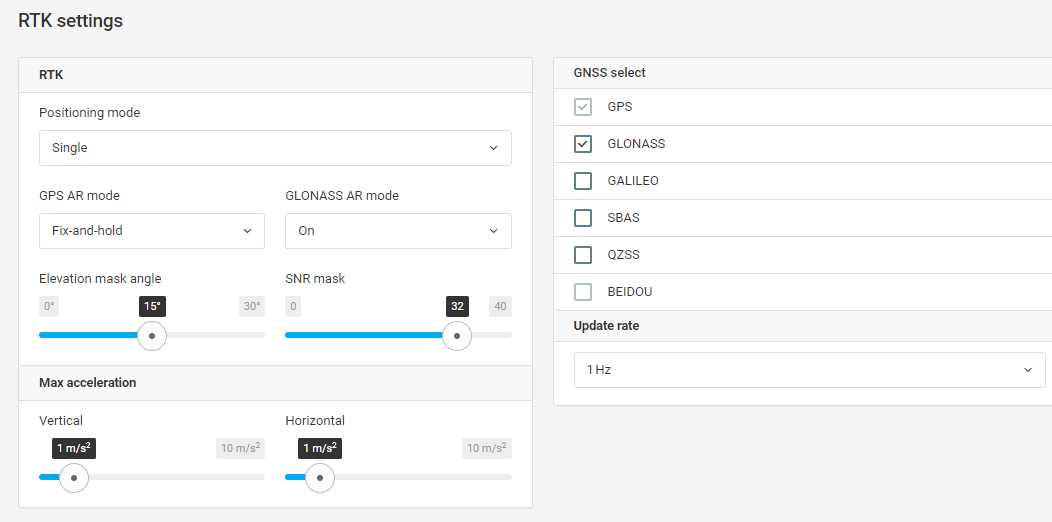
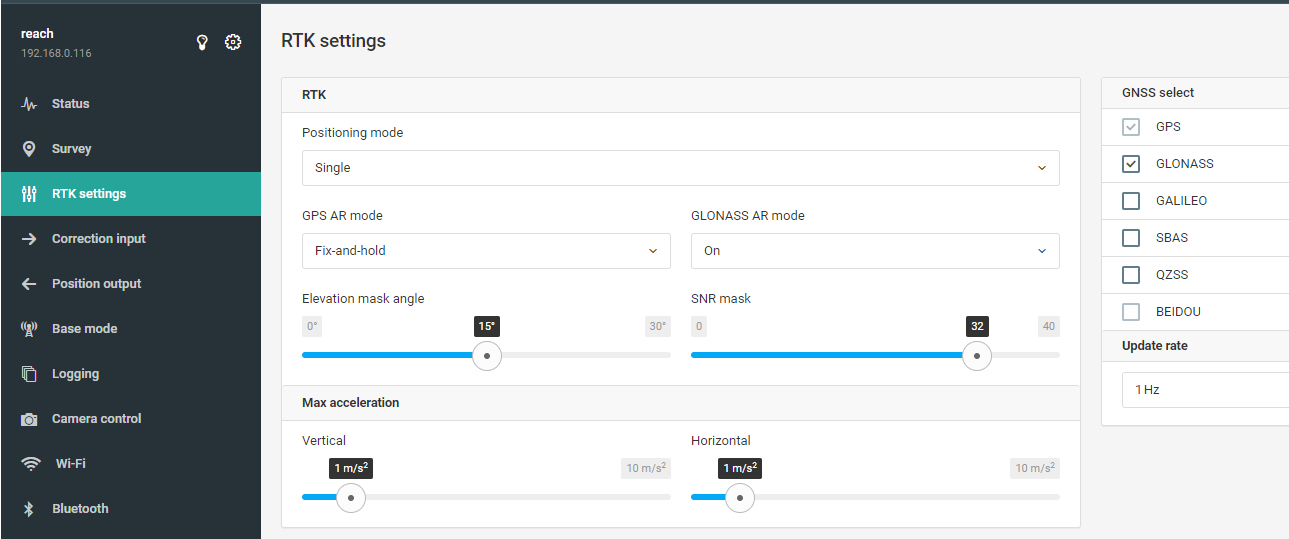
Em quais das abas do meu emlid eu configuro para pegar apenas esses satélites e essa taxa de atualização?
Obs, estou fazendo leitura normalmente e corrigindo depois com uma outra base (que corrijo por ppp), não estou usando NTRIP, RTK nem nenhuma outra correção.
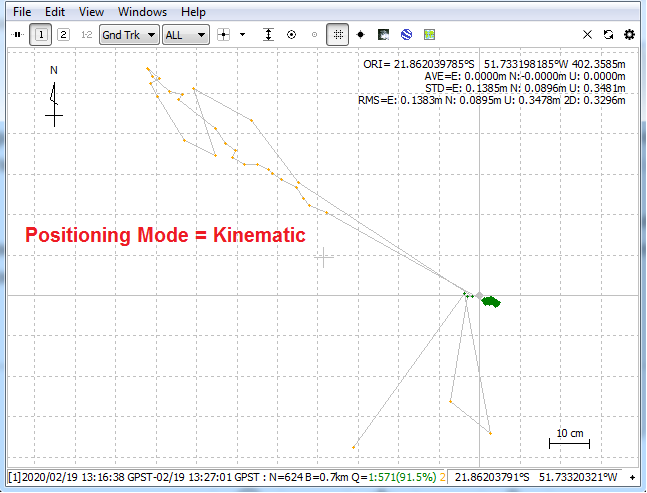
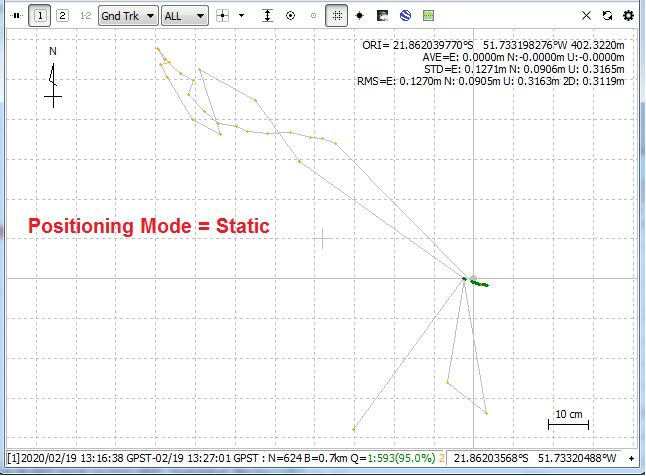
Eu fiz o processamento pelo GNSS e consegui normalmente, porém quando vou faze-lo pelo RTK lib ele dá o processamento como Q5, sendo que a base estava medindo juntamente com o ponto (caso contrário eu não conseguiria no GNSS)
Por gentileza, vc sabe me dizer se pode ser alguma configuração minha?
Processei seus dados, a solução foi Q=2, deve ser alguma configuração, ou a coordenada que você está inserindo para base pode estar errada também, eu usei a coordenada aproximada do cabeçalho do Rinex da base. Reparei que na base você rastreou apenas GPS, sendo assim, houve poucos satélites envolvidos no processamento.
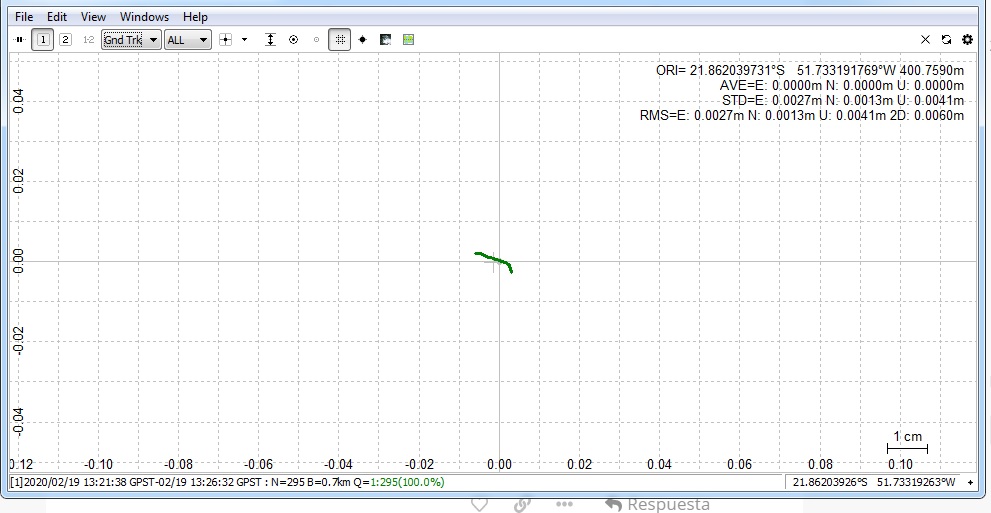
Bom dia Gabriel, realmente, refiz todas as configurações porem deu float (Q2).
Você tem alguma dica, pois a base é l1/l2 e ficou aproximadamente 4,5 horas e o emlid aproximadamente 10 minutos com frequência de 1hz porem não fixa quase nenhum ponto mesmo em lugares abertos.
Eu tenho um outro L1 que fixa próximo a 5 minutos com a mesma base.
Teria como configurar o seu receptor base para mais constelações GNSS e também aumentar a taxa de gravação? A sua base está registrando 4 observações por minuto, o que é muito pouco em um processamento com dados L1, tente colocar a base 1hz, aí você passará a ter 60 observações por minuto, como uma maior quantidade de observações melhor será o seu resultado.
Infelizmente não há como te dizer por exemplo quanto tempo ficar em cada ponto, o seu rover por ser L1 sofre muita interferência, qualquer obstrução do sinal é um grande problema, a base estando 1hz como você mesmo mencionou melhorou, pois assim você possui mais observações. Por você usar apenas uma constelação, também é um fator muito relevante, pois o número de satélites é sempre baixo, e isso possui uma grande influência. Então fatores como local, obstruções do sinal, taxa de gravação, quantidades de satélites, entre outros fatores, tudo afeta em relação ao seu posicionamento.
Após a análise desses dados, tudo fica bem, exceto que o tempo de 10 minutos e 23 segundos é insuficiente para obter a correção do status
Tente estender para 15 ou 20 minutos.
entendi, uma dúvida que eu sempre tive, a correção se faz somente com o gps gravando (pois vai utilizar esses dados para a correção), correto? ou caso eu ligue e deixe ele ligado por um tempo mesmo sem gravar ele vai se “resolvendo” ?
e por fim, você sabe me dizer se no caso de comprar um M2 + Lora se ele consegue se comunicar (Através do RTK) com um M+ +Lora?