



Hi. I have a Navio 2 running APM:Copter V3.4.6. I have just moved the board onto a new frame which is exactly the same as the frame shown in this Project share: Quanum Spider 700 Quad
I did all the usual calibrations: set frame type, accel, rc, compass, esc, etc and took my bird out for a maiden flight to see how it went. I started in Stabilise mode.
What I found was that I got it in the air (it looked a little tippy on take off) but then I was really working the sticks hard to keep it level. It was rolling around quite a bit. I landed it after a few seconds of wrestling then tried a few more take off attempts very carefully watching what was happening. It had a couple of roll overs on takeoff.
I was taking off from particularly long grass. So it could have been the gyros initialised funny because the copter was not levelled right. Would that cause these types of symptoms?
I had a look at the logs to see what I could find. I can see that vibrations are NOT a problem. I triple checked the motor layouts and they are ok.
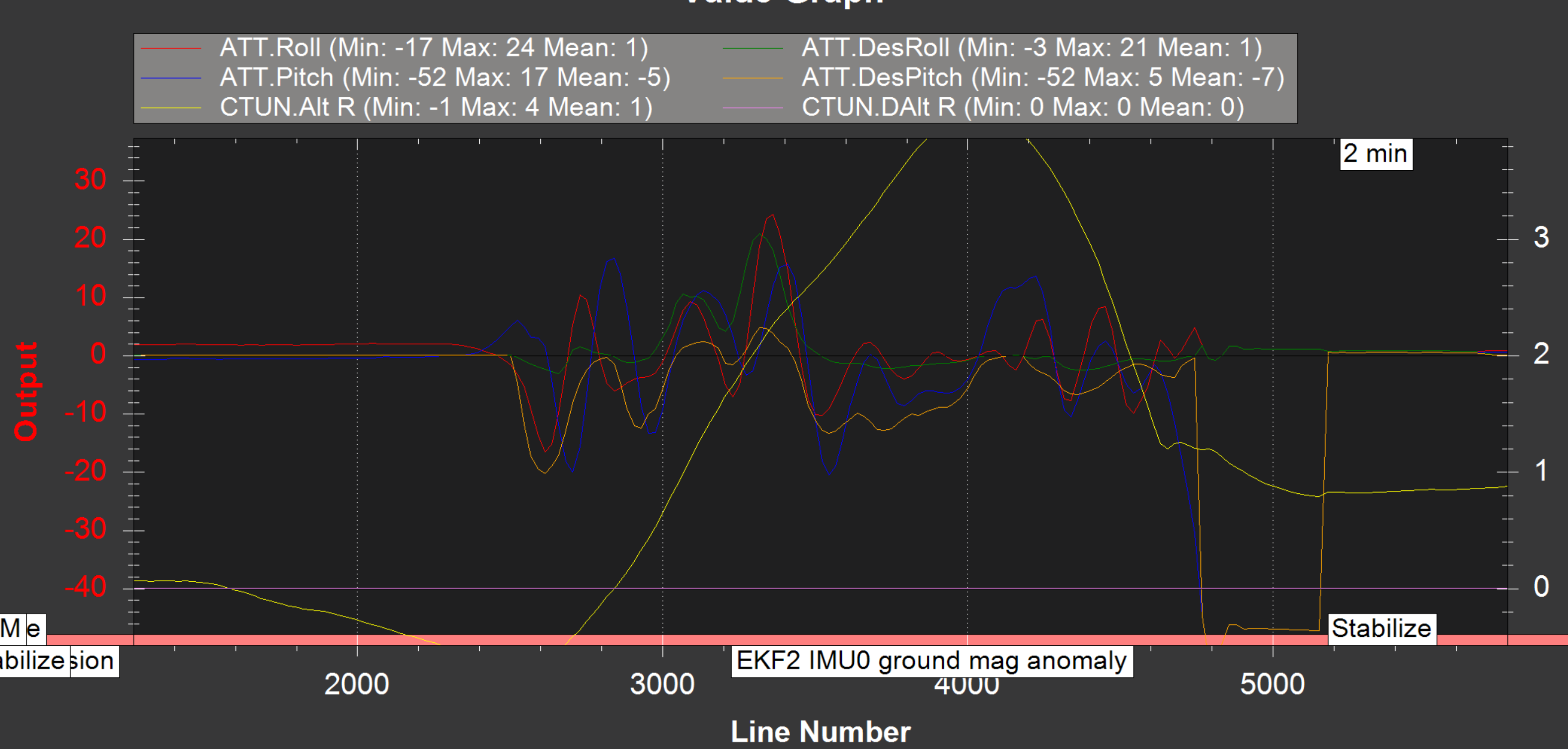
I did notice some some differences between desired roll and pitch and actual roll and pitch and I wondered if that represented a problem?
I would love the eyes of someone who has looked at these logs more than I.
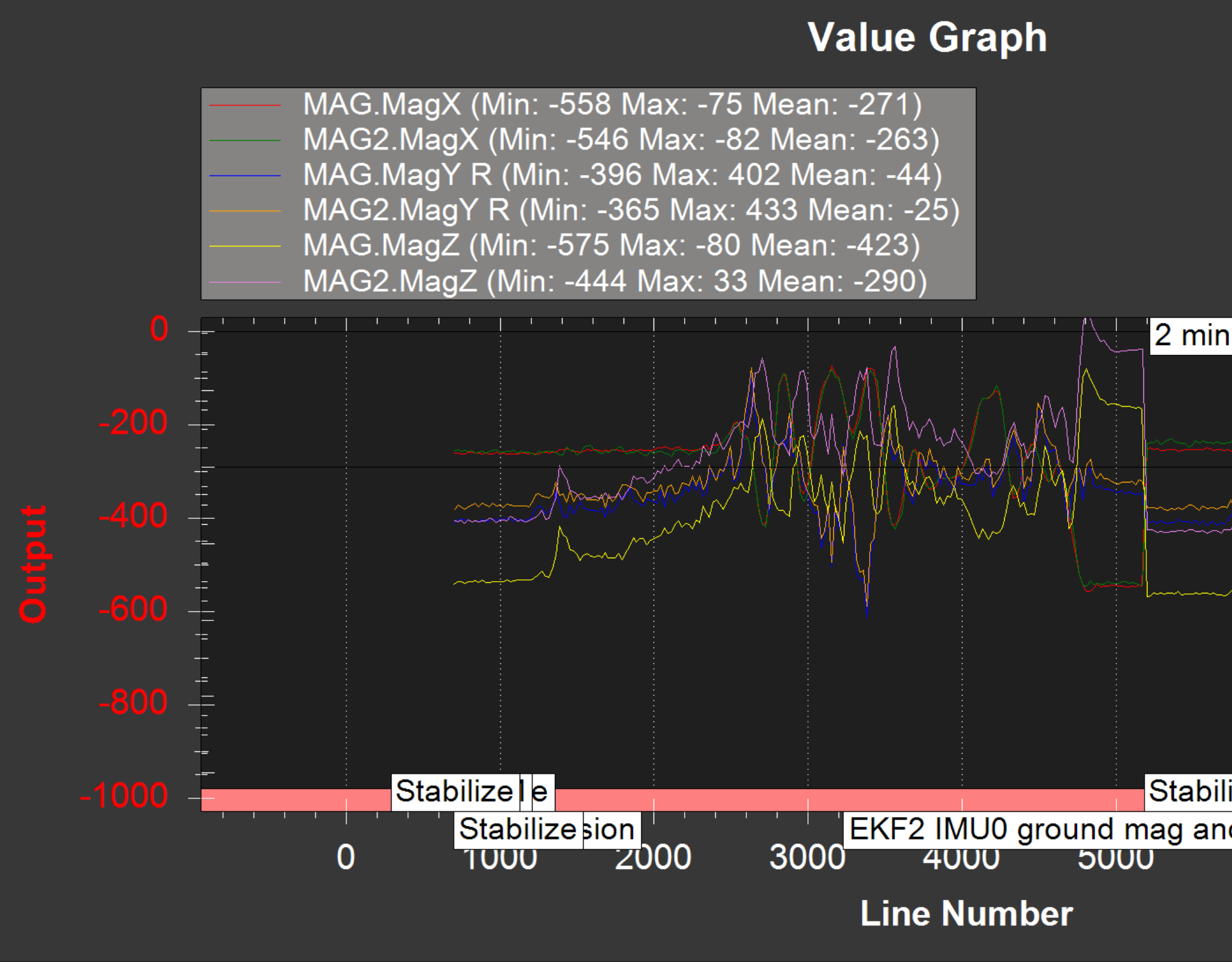
I also noticed that the mag readings looked particularly variable in flight. I didn’t think that should make a difference in Stabilise, but will it likely present a problem in other modes?
2017-09-24 16-43-31.log (1.4 MB)