Hello everybody,
Yesterday, after a period of inactivity with our RTK system, we went to do some tests to verify that the system works correctly.
In the morning we did some tests with the RTK system near the office, where we obtained the expected results,although with AR levels not very high (in other tests we have reached AR values of the order of 20 and yesterday morning just obtained values up to 8).
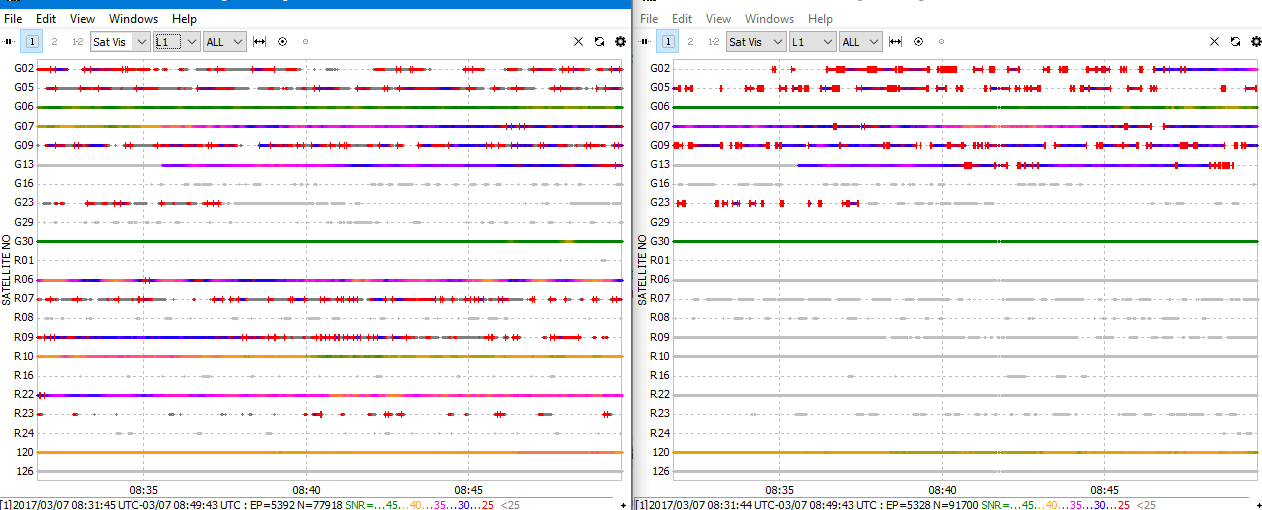
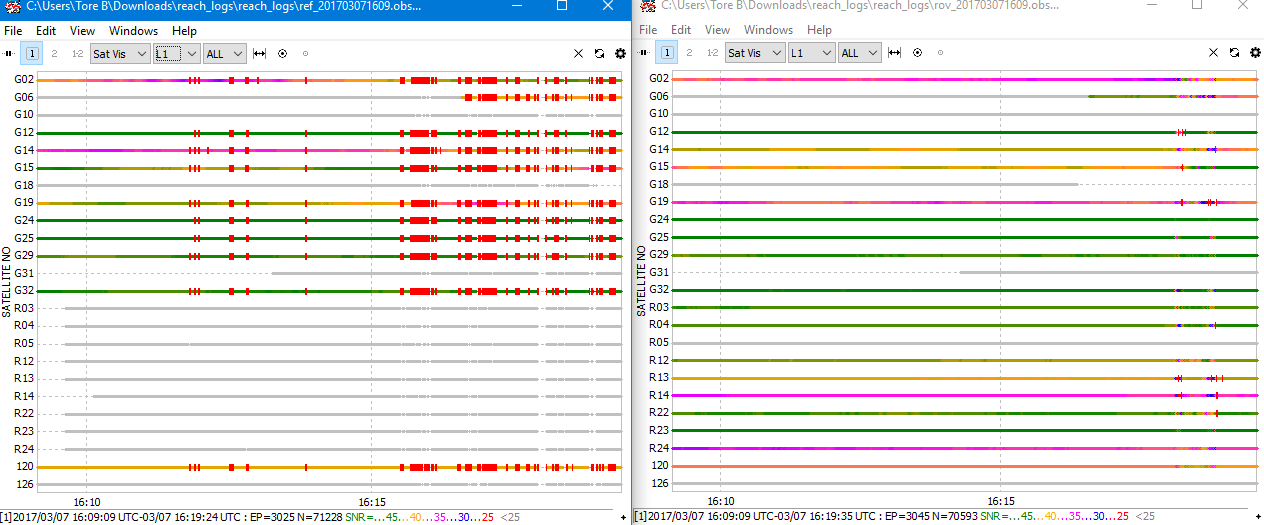
Later in the afternoon, we went to a different place to test the system and we were not be able to obtain a steady fix. The system struggled to get a ratio of 3 after several minutes, and when it gets the fix, after around 20 seconds the ratio falls down to 0 again. That cycle goes on and on without getting to keep the fix status for a long period.
The firmware version of ReachView is v0.4.9 and Reach Image version is v1.2.
We have the base on a tripod about 2 meters above the ground and the rover is about 50 meters away from the base. The base sends the corrections to the rover via a WIFI router.
We did the same procedure to obtain the base’s coordinates in all of our tests: get coordinates from Rover with single solution and set those to the base.
I attached the rover logs as well as all the information I could extract from the RTKPlot during the test.
Any help or opinion will be welcome.
Thanks.