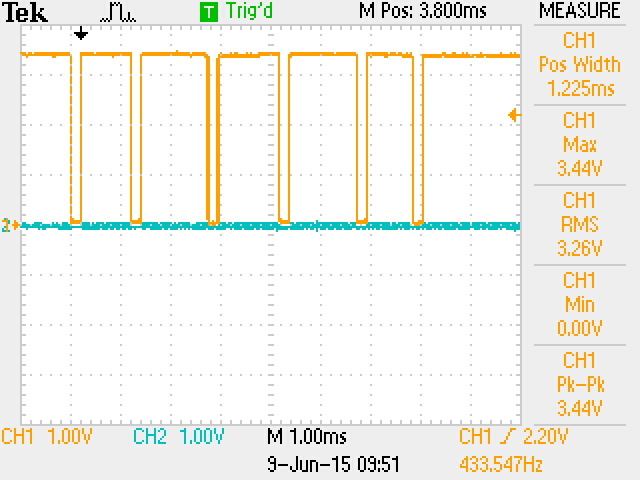
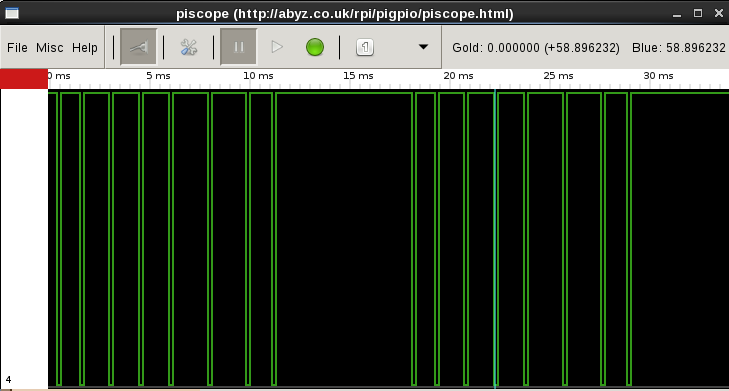
I’m having some problems getting the PPM decoder to work and was wondering if anyone could provide some insight. I am using a signal converter from fpvmodels for the PWM to PPM conversion (). I verified the output from the converter using an oscilloscope and noticed a few differences between the oscilloscope output and the definitions in the PPM.cpp example file. The ‘ppmSyncLength’, which I’m assuming is the time between repeats of the concatenated PWM signals, is 7ms instead of the 4ms defined in the file. The number of channels was also different as I only had 5 inputs (The output PPM signal from the converter is dependent on the number of channels connected unless it is less than 5).
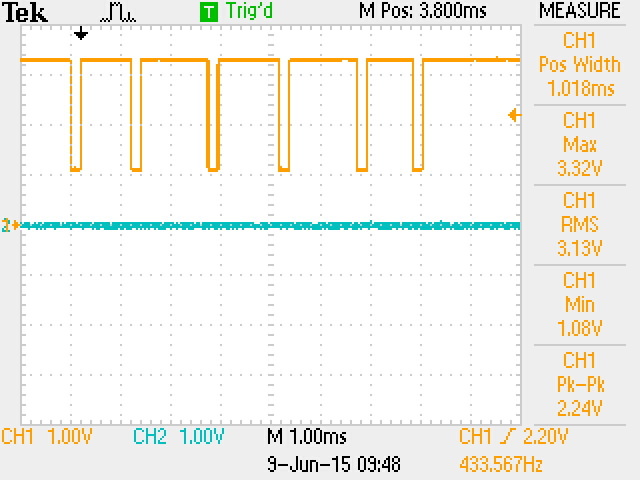
After changing ‘ppmSyncLength’ to 7000, ‘ppmChannelsNumber’ to 5 and ‘float channels[8]’ to 5, the output to the console is just a flashing cursor. It appears the execution is hung up somewhere before the if statement for console output (‘verboseOutputEnabled’ is set to true). Doesn’t matter if I wiggle the sticks on the transmitter or not. Also the peak to peak voltage is only 3.13V even though the input voltage is 5.25V, not sure if this is a problem or not.
Is there something else that needs to be changed in the PPM.cpp file for this to work with this converter?