Hi, folks. I am the fresh men here and also the field of drone mapping. I have read many useful information here, and found that everyone here is nice and friendly. Now I have some troubles with PPK using. If anyone can help that would be nice.
When I use PPK, I should set my base and start logging. At the same time, I should start logging at my Rover. I found in the previous questions that base should also collect maybe one point for 15-20 minutes, then I can use the rover to collect GCPs at where I want. Is that true? and how long it will take or how long is suggested for rover to take the GCPs later?
When I control the base and rover, they should be in the same WiFi net. So when I use the rover on the drone to mapping, it maybe not in the range of WiFi. When It come back and reconnect to WiFi, the logging data is still there and can be export from the app, am I right?
Sorry for asking some simple questions, even I read the tutorials from the homepage.
I will appreciate for anyone who browse this topic and give me some help?
To answer #1 you need to tell us which equipment you are working with.
For #2: The log files are saved on Reach. You connect with Wi-Fi to change settings (like turning the logging ON and OFF), and you also connect with Wi-Fi to download those log files.
Thank you so much bide. Actually, I am using the original Reach Module set, which just has a piece of Athena, the Reach module and the power bank. Here is the link of the one that I am using.
The base should be logging and stationary for the duration of your job, or at least as long as you are collecting points. The data collected by the base is to correct the rover position.
Dear Wizprod, thank you so much, I saw plenty of your answers before! It is really nice that you can help me.
I just tried the collecting points. And here I can get the UBX from base and rover, and the CSV that record the collecting points from rover. But when I open the CSV it is said that this point is single solution. When I use RTKLIB to process the both of the UBX, I will get the .pos, so how can I deal with the CSV and .pos. Would you mind telling me how to process with these two items?
GCPs’ placement with PPK may require more time than the same process involving RTK technology. For RTK you’ll need to write one durable log only once - for the initial base position. While for PPK GPSs’ placement you must also log every GCP’s position for several minutes and calculate their coordinates in RTKLIB separately.
Since you want to get coordinates of your GCPs with PPK along with writing a continuous log you should also collect points to know the exact time periods.
If you placed your base without using an absolute reference point you need to determine the base’s location first. For that, you need a correction log from your local reference station at the time of a survey. After processing it in RTKLIB you’ll get averaged centimeter-level position.
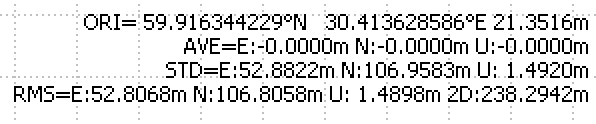
Further processing is done in the RTKPOST. You should also specify the obtained base’s position in the options’ “Position” tab. After that, at the plot, you need to edit Time Span for your log to get averaged GCPs’ position. This setting is located in the title bar (Edit > Time Span/Interval). Period must be selected within the time of certain point logging. The position will be displayed as an ORI position in the upper right corner.
Regarding the connection to the Wi-Fi network. Since you are calculating GPSs’ position with PPK it doesn’t matter if the rover loses the connection. It still will be able to log its position. Base corrections for centimeter lever precision can be applied in RTKLIB afterwards.
Thanks for your detailed reply. I will follow your suggestion and explanation in the field work of tomorrow.
I really appreciate for your detailed explanation. As you said, I should log both in base and rover, and then collect the point in rover, and according to the time for getting the points. I can determine every points manually by using RTKLIB, and the base will log both raw data and base correction. Is this correct? Shall the base also collect the points? And when the rover is collecting points it should be choose as single or fix or others?
You are right. Both rover and the base should log their position. Although, the base’s role in the survey is to provide an absolute reference point for precise measuring and to supply the rover with corrections. During the survey, you collect points only with the rover.
It is also true, that you can determine every required point collected by the rover in RTKLIB later on. For that, you need to separate these points in time with a Time Span/Interval setting. On the RTKLIB map, they will look like a group of points around one location. The point’s desired coordinates are the averaged value.
Since you want to involve PPK, it doesn’t matter in which state you will collect a point with ReachView’s Point Collection tool. You need them only to determine precise time spans of each point collected.
Thank you so much for your detailed information. I appreciate your help in giving essential information for collecting the gcps. Now I have collected all the gcps, and I noticed that you said that I need a correction log from your local reference station at the time of a survey. I searched the Geospatial Information Authority of Japan, and I found one local reference station, would you mind telling me whether I can use this to correct for my base data.
Thank you so much for your help, it is very kind of you.
If the reference station’s located within 30 km from your base’s location, you can. Then these logs can be used to determine the base’s location with centimeter-level precision.