



here is my experience with a free and commercial softwares:
- to get a better result using RTKLIB
I add a few things to the example that I treated at the link
a very simple configuration for example is to change some options.
- You can also test one frequencie L1 for a baseline less than 20 km or a little more for an ideal environment and change Filter Type to combined (it will took more time in post process).
- Change Elevation Mask to 10°.
- Satellite Ephemeris/Clock to Precise when a files a ready to download.
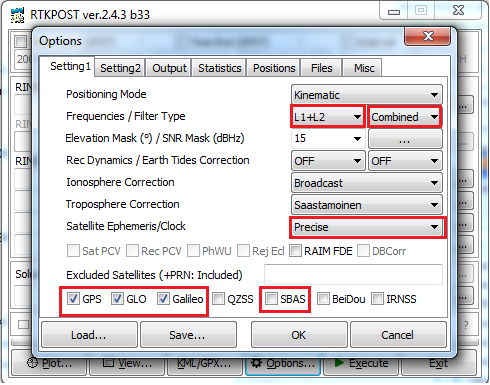
if you are in North America you can almost check the SBAS box so
the extra measurements will increase the robustness of the solution, particularly in the case of a moving rover where many satellites may be unusable due to cycle slips.
and finally sometimes enabling or disabling some satellites or the all constellation can affect a solution.