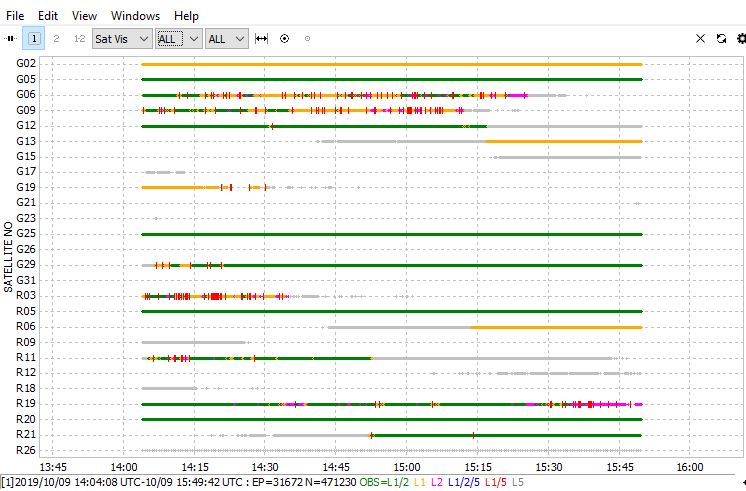
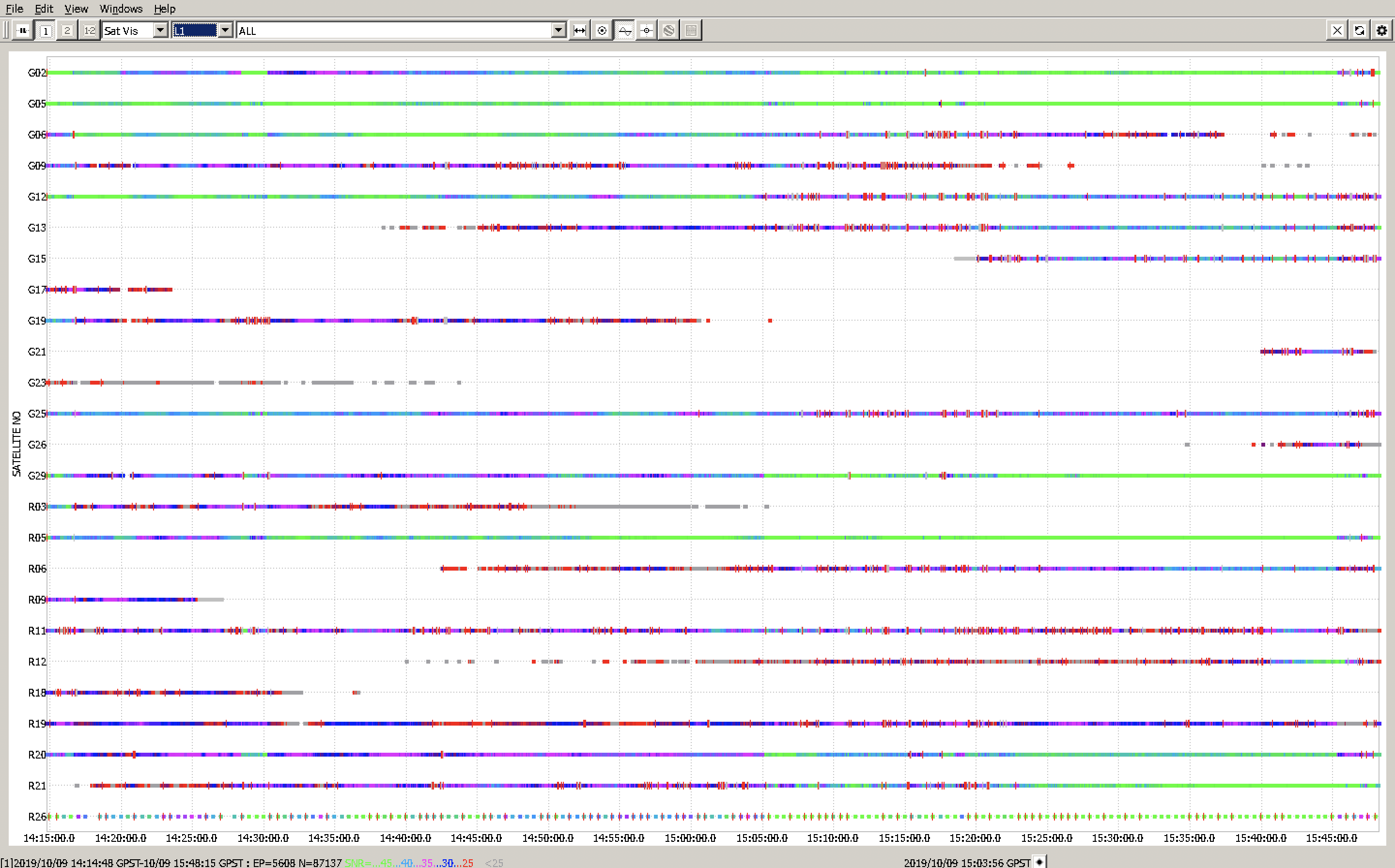
I have a field crew running a PPK survey and I have a section of data where I can’t achieve a solution with RTKLib (demo5 b31). Running two RS2s with latest version of ReachView. Below is a screen shot of the Base and Rover Sat Vis from RTKPlot:
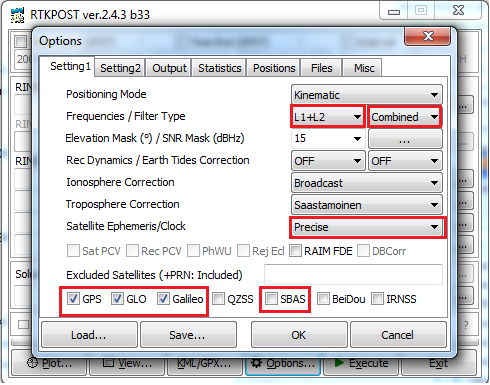
Lots of cycle slips from the Rover. I’ve attached my RTKPost config file. Can any advanced RTKLib users provide some settings tweaks that might do the trick? If anyone wants to see the raw data message me directly, as the Base file is too large to upload directly.
Take the std config from the RS+ rtklib distibutable.
The problem is that there is not one-size-fits-all with this. 1 config might work nicely with good snr, with bad SNR it is a different story (as you have compromise i.e. SNR values to get a usable solution).
here is my experience with a free and commercial softwares:
to get a better result using RTKLIB
I add a few things to the example that I treated at the link
a very simple configuration for example is to change some options.
You can also test one frequencie L1 for a baseline less than 20 km or a little more for an ideal environment and change Filter Type to combined (it will took more time in post process).
Change Elevation Mask to 10°.
Satellite Ephemeris/Clock to Precise when a files a ready to download.
if you are in North America you can almost check the SBAS box so
the extra measurements will increase the robustness of the solution, particularly in the case of a moving rover where many satellites may be unusable due to cycle slips.
and finally sometimes enabling or disabling some satellites or the all constellation can affect a solution.
they are numbered most conservative to least conservative
i run them in series and create a composit product
the settings are based on what i have read at rtklibexplorer.wordpress.com
and i use b33a
In kinematic mode, you either get a fix or you don’t. I think the only setting that may have led to a different outcome is the ambiguity setting. I use continuous for static & fix & hold for kinematic. But I have interchanged those 2 settings because I forgot to check and would still get a fix. This is the reason why I use a 2nd base for my kinematic work. At least I get a 2nd reference station data that may fill these missing data gap.
There are much advice in the messages above that can help you achieve a better result in post-processing. Also, it’s always possible to consult our guide on improving the PPK results.
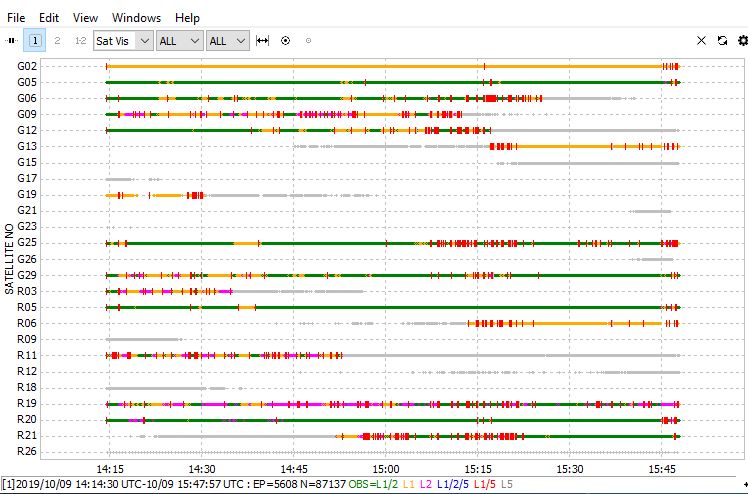
However, I’d recommend starting with the first step for the good PPK which is the quality of observation data. From the data you’ve shared with us, I can see that both base and rover logs have a lot of cycle slips and generally low SNR. I’ve attached the screenshots below.
For the time of the rover observation, you can see that simultaneously both base and rover see only two satellites with somewhat good quality (G05 and G02) and two more satellites with partially stable SNR (G12 and R05). I’m afraid this data can hardly allow you to achieve a good post-processing result.