



Delta is for the antenna offset. That is your pole only. You need to convert your coordinates. You can use the height without conversion, I think. You also need to read the manual… .
1 Like
I think the ground elevation and pole offset should have either been accounted for in in Reachview or whatever data collection software you used making the drone relative to that ground elevation. All you should have to do is enter the antenna offset for the rover (drone) and the base ground elevation converted to meters. I would put the base position in QGIS as a point with your XYZ (State Plane?) coordinates and export it back out as WGS84 - unless you have another converter.
Hello, from RTKLIB manual 2.4.4
(5) Position (pag. 43-44)
Base Station
Lat/Lon/Heig ht (deg/m)
Set the position of the base‐station antenna.
‐ Lat/Lon/Height (deg/m): Latitude/longitude/height in degree and m
‐ Lat/Lon/Height (dms/m): Latitude/longitude/height in degree/minute/second and m
‐ X/Y/Z‐ECEF (m): X/Y/Z components in ECEF frame.
‐ RTCM Station Position: Use the antenna positionincluded in RTCM messages
‐ Average of Single‐Pos: Use the average of singlepoint solutions
‐ Get from Position File: Use the position in theposition file. The station is searched by using the head 4‐character ID of the rover observation data file
path.
‐ RINEX Header Position: Use the approximate position in RINEX OBS header.
Delta‐E/N/U
Set the delta position of the base‐station antenna as E/N/U offsets of ARP position with refer to the marker (m).
Reach RS+ U (m): 0.065 (ARP to L1)* + 0.0215 (adapter 5/8" to 1/4") + heigth of rod and other adapters
*As RS+ is not included in the IGS antenna file, it must be added
Greetings to all
Saludos a todos
I have exactly the same Problem. About 50 Time mark Events are missed!
I have used the following Settings for my PPK (base aund Rover the same).

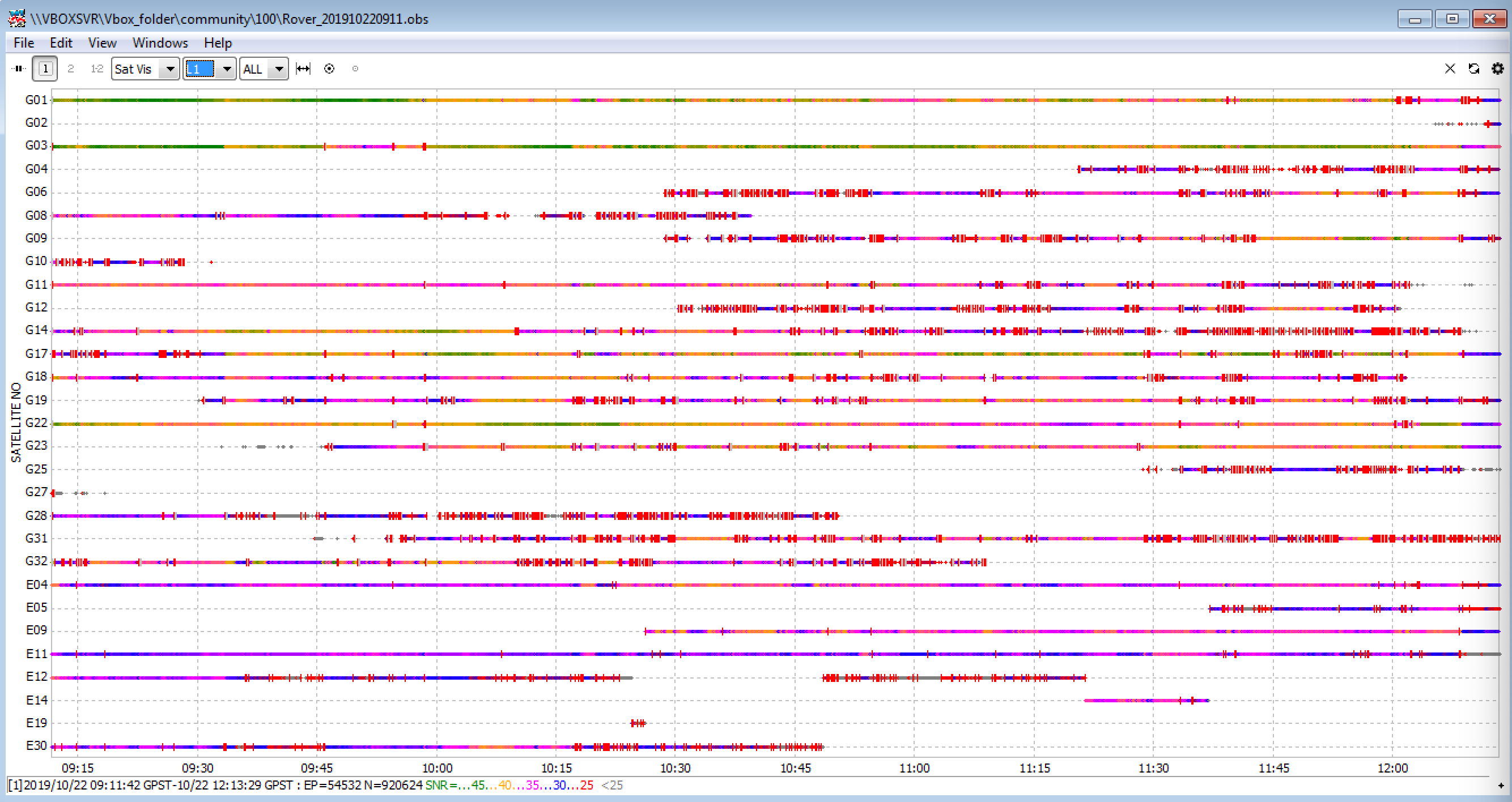
The Observation file from Rover:
All data was downloaded and processed using EMLIDs rtkconv and rtkpost apps using the recommended settings found online.
I do not know the recomended RTK Settings for Germany! Any Idea?
Thanks alot.!
Hi Maryam,
For time mark logging, we recommend using one of the following settings:
| System | Frequency |
|---|---|
| GPS + GLONASS + GALILEO + SBAS + QZSS | 1 Hz |
| GPS + GLONASS + QZSS | 5 Hz |
| GPS + GALILEO | 5 Hz |
| GPS | 10 Hz |
Otherwise, time marks can be lost.
3 Likes
Hi Tatiana,
thanks alot for your answer. Now i have all my timemark events :). I use PPK with Base and Rover. The events.pos : Rover_Sapos_Base_201910231053_events.pos (126.6 KB)
The Question is: Q= 2 , but the sdn, sde, sdu are all in mm. Q=2 means Float : accuracy is submeter-level, but my standard deviations are all in mm ? Whats wrong?

Thanks alot.
Hi Maryam,
Glad to hear you managed to get all the time marks 
May I ask you to share raw data from both base and rover? I’d like to check your observation data quality and try to post-process them.
Thanks!
Hi Tatitana,
the files are too big and i can not share them here. How can i send you the files?
Hi Maryam,
You can upload them on WeTransfer as Christian suggested or use any other file sharing service
here are my files. Thanks alot
Hi Maryam,
We’ll check them and get back to you!
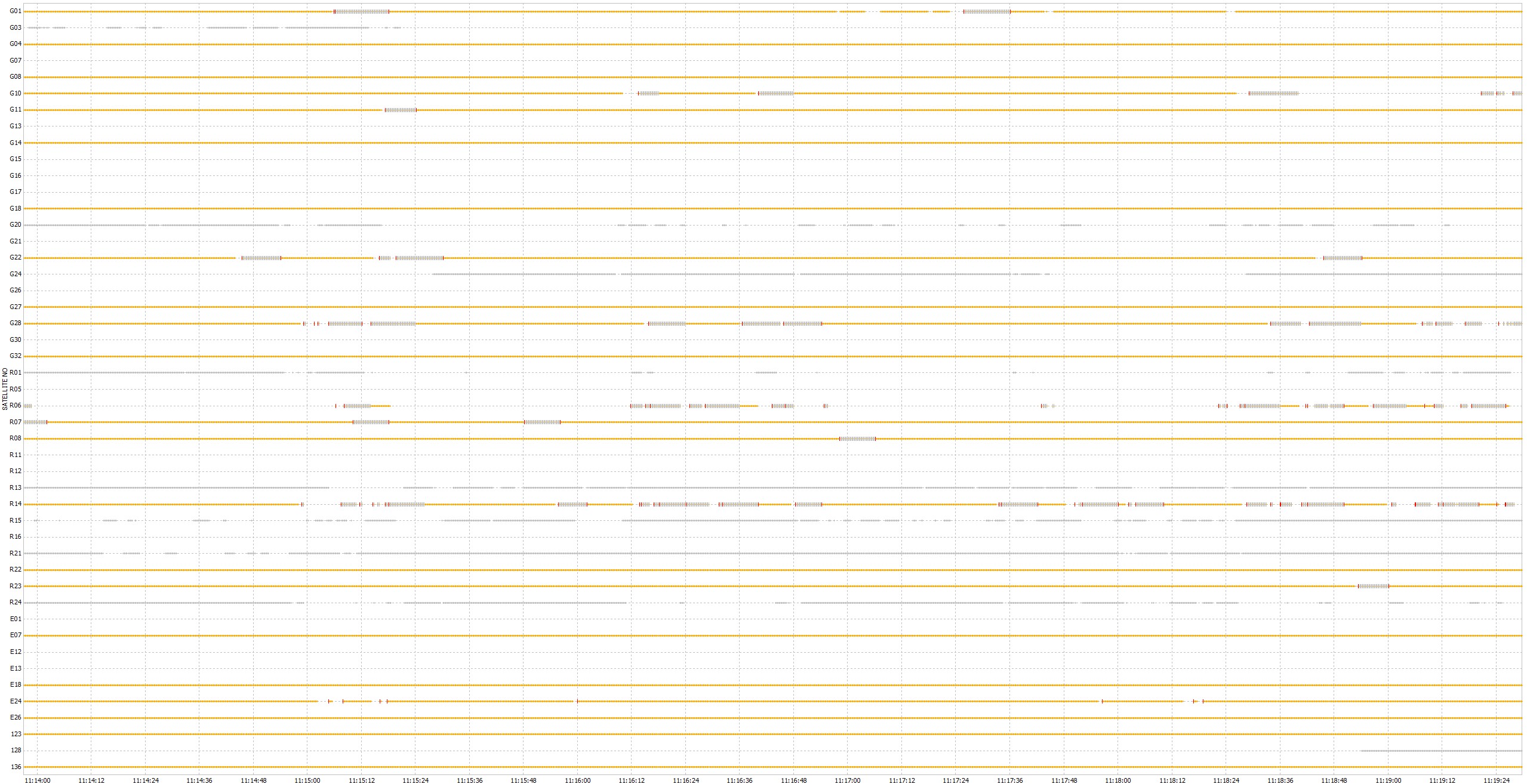
Your Rover SNR quality is so bad!
There are a lot of slip rings in it.
Such data will not give you a fix.
1 Like
yes…I know.
But i use post-Processing of my data and the goal is to improve my accuracy.
After post processing get it Float.
Change antenna first.
Then try to make survey again.
Signal-to-Noise-Ratio and accuracy go hand-in-hand. Fix your receiving-conditions (antenna, noise sources, location) and you will get a fix-solution eventually.
i have a question:
I got this Positions after Post-Processing
Sapos_Base_Rover_201910220911_events.pos (151.0 KB)
Are they all wrong,because of SNR?
They can be wrong because of many reasons.
But yes, if you have a float solution with a baseline under 60 km, you shouldn’t trust your results in general.
1 Like
After nearly 9 month of missed time mark and no solution on the forum, you can find my thread here I found one today, simply by ignoring this line from the GPS post-processing guide on the Emlid docs :
If your raw logs from base and rover are saved in .ubx format you should convert them to RINEX. If you already have RINEX logs from the receivers you can skip this step.
Using the RINEX directly from today’s flight, 5 missed time mark, but converting the UBX to RINEX and I magically have all my marks.
It’s really a shame, all this time lost modifying my drone , buying stuff to improve it, countless test for nothing, with my boss very mad a me, nearly losing my job. all that because of a software issue…
I’m sorry to here about your troubles. Anyhow I’m not sure whether the software bug is the single source of your problems.
In my case cycle slips are the source of the lost time marks. I work around those problems by machting images and time marks with an Python script. I interpolate the missing time marks from my Arducopter logs. Meanwhile I also do lever arm correction based on the Arducopter logs.
If that helps you I can send you a simple program to match the images and the time marks. But it is only working (the simple version) if youre camera supports subseconds in the exif tags or your capture interval is above 2.5 seconds.