



Wow you are magic, can I see the last config? I must start to intend how the config works.
Thank you very much


1 Like
I’ve done one for Forward RTKPOST.
Might help to add GAL satellites. Also, appears Base has GLO sats on, but Rover only has GPS +SBS
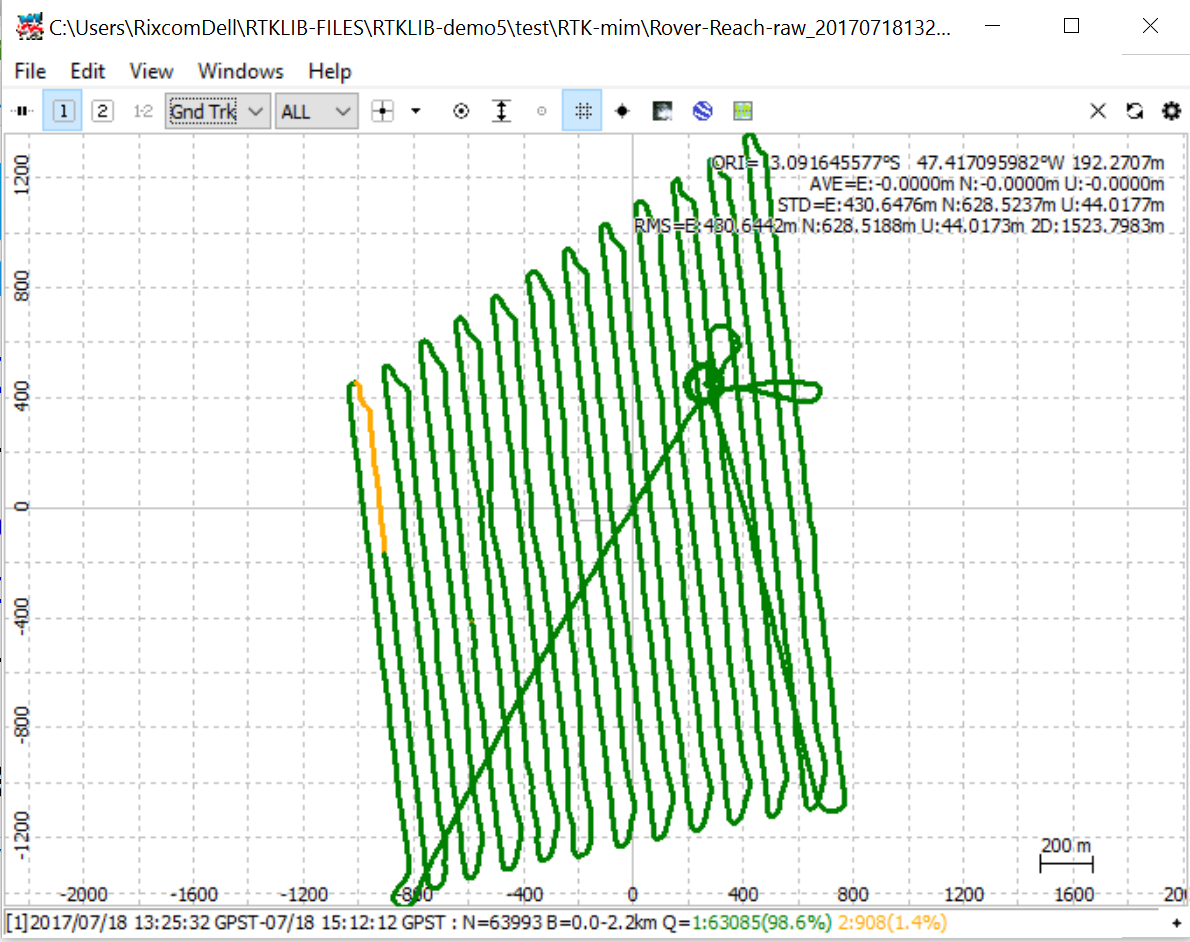
I had trouble with Combined Forward-Reverse processing. Position file showed 100% AR values above 3.0, bit Q changed between 1 & 2 Must be some bug in version I’m using.
I also see that there were only about 3 SAT with good signals above 30 degrees on Rover.
Also, signals to BASE in one direction are weak. Is the sky blocked?
Next, what material is your plane? If it has aluminum or carbon fiber, it most likely is causing severe multipath especially in turns where there seems to be difficulty holding fix. The data slips appear to suggest this. Is it aerodynamically feasible to locate the gps antenna so it is above the tail ,wings, and/or nose when in turns?
Processing results suggest minimizing turn rates if antenna cannot be raised.
2 Likes
Yeap, its all about pushing the right button 
1 Like
Not sure SBAS is much help in Southern Hemisphere. Maybe some one has more info. Also, Emlid is upgrading RTKLIB according to Blog.
1 Like
I choose SBAS only because of higher refresh rate
You can see the UAV pictures up in this thread
The Base had no sky blocked
I stil can’t get those results, and I get the out of memory problem at least twice then it works (have to close and run RTKpost again until it works)
Thank you
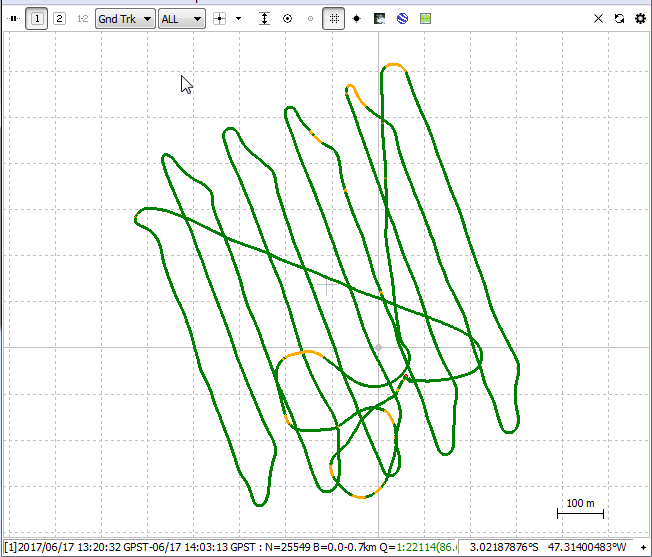
After some discussions with Tim at RTKLIBExplorer.com, I see that my results might be somewhat misleading. Although I got good fixes in the Forward processing, there may have been some false fixes. The reason I did not get good FIXes on Combined solution is that the RTKLIB software compares the Forward and Reverse solutions and switches to FLOAT in the Combined mode if there is too much difference.
I switched to Continuous mode for Kinetic mode and although my FIXes were less, there appeared to be less differences between solutions.
Re SBAS, sounds OK to me. Thanks.
Re: Out of Memory problem. I’ve had that as well. I remember it went away when I shortened the Total size of the log. I think it is computer dependent, but I don’t remember which computer acted up.
1 Like
One other item: I commented about SNR levels being low on both Rover and Base. Usually, the Base would have much better levels. I’m a bit confused. Is there anything in common in Rover and Base setup? Excuse me if I offer too many thoughts…
1 Like
Dear Richard, thank for your thoughts, I am actually doing without knowing deeply what’s happening so any input is precious for me, I upload a video that shows that survey, you can see the Base station on a tripod at 0:25
Apparently, my setup won’t display your you-tube video. Someone else may have some experience with this. I think possibly a link is needed…
I’m learning, too.
sorry it’s fixed now
Hello again,
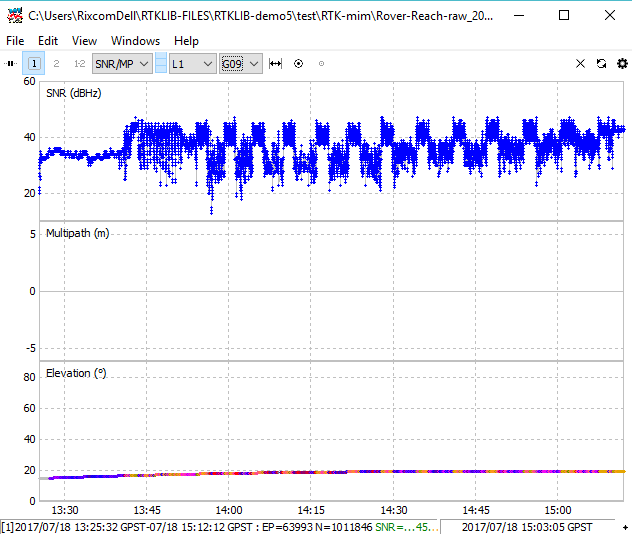
After looking again at Rover and Base SNRs for individual sats, it seems that most of the Base sat SNR are relatively consistent although lower than I would expect. The sudden drops in SNR appear to be when individual sats drop or rise at the horizon. This is to be expected.
The Rover SNRs seem to be good up until just before the flight begins. This suggest that the data link and receivers are OK. Just before takeoff, The SNRs for all Rover sats appear to get quite noisy. If you look at the individual sats in RTKPLOT from visibility analysis, each appears to become very noisy and turns cause a significant drop in SNR for each satellite. So, my guess at this point is that there is something in the Rover that is inducing noise. I now think it would not be multipath, but something like motor noise or vibration.
The drone Copter Reach and Navio contributors may have some thoughts on this.
You should get good results with your setup in my opinion.
1 Like
Thank you very much Richard
I would try to test the drone tethered to ground and log for test purposes:
- Data - only Reach operating: log times
- Motors On
- Flight Controls - power on
- Props On/Off
5 Data Only - Set Drone to various attitudes
Data Only
Satellite G09 appears to be worst case as it was near horizon. Removing it from PPK improved results significantly, but not yet ideal. SNR plot for it illustrates stress placed on RTKPLOT to get good stable FIX. Notice one of first banks showing SNR dropping to zero and sensitivity to attitude and/or direction/speed.
1 Like
Can i update the firmware to latest version without affecting these tests?
I don’t see why not.
1 Like
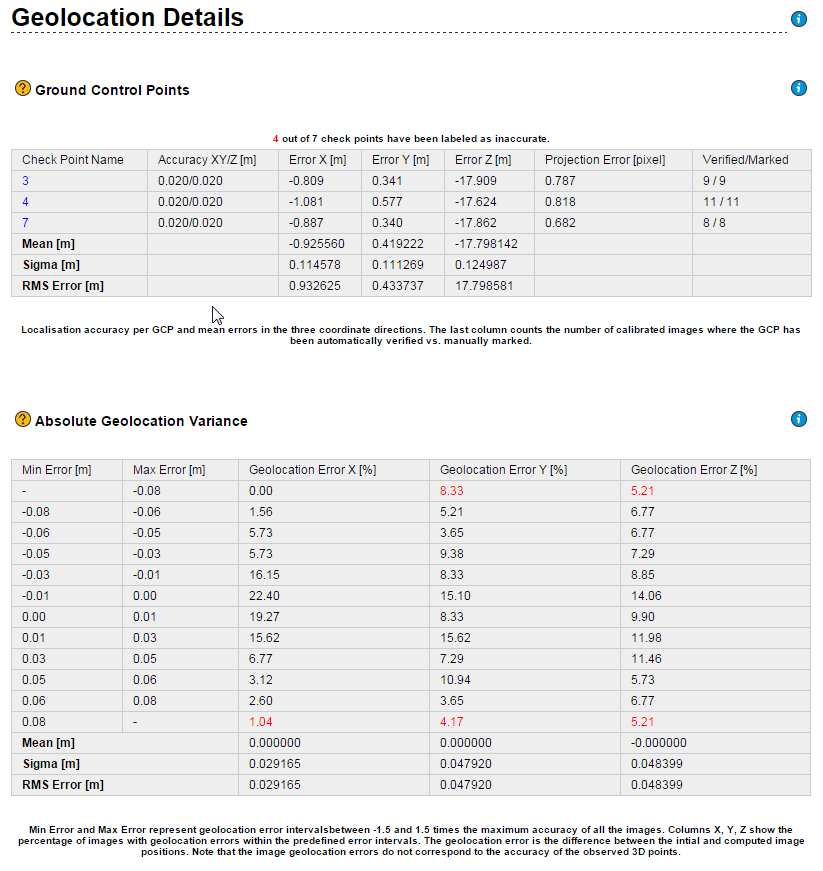
I had time to elaborate my first test where I have 3 GCP on the ground with Trimble geodesic GPS, RTK fix Q1, GSD 4.33 cm/px, and here the results by Pix4D, I think I can do better especially the Z.
p.s. btw I don’t know the precision of that Trimble GPS: Base Trimble R4, Rover Trimble 5700

2 Likes
This topic was automatically closed after 100 days. New replies are no longer allowed.