Quando vou visualizar os “pontos” eles estão deslocados, e estão bem ao lado da base, mesmo sendo coletados a 30 metros dela. era para os pontos estar no “ponto” azul e não próximo a base.
Segui a risca esse tutorial:
OBSERVAÇÕES:
fiz o pós processamento da base por PPP do IBGE.
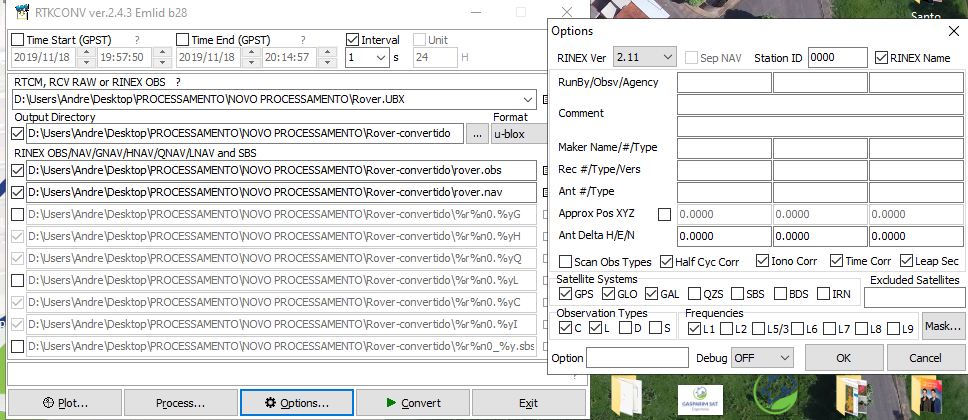
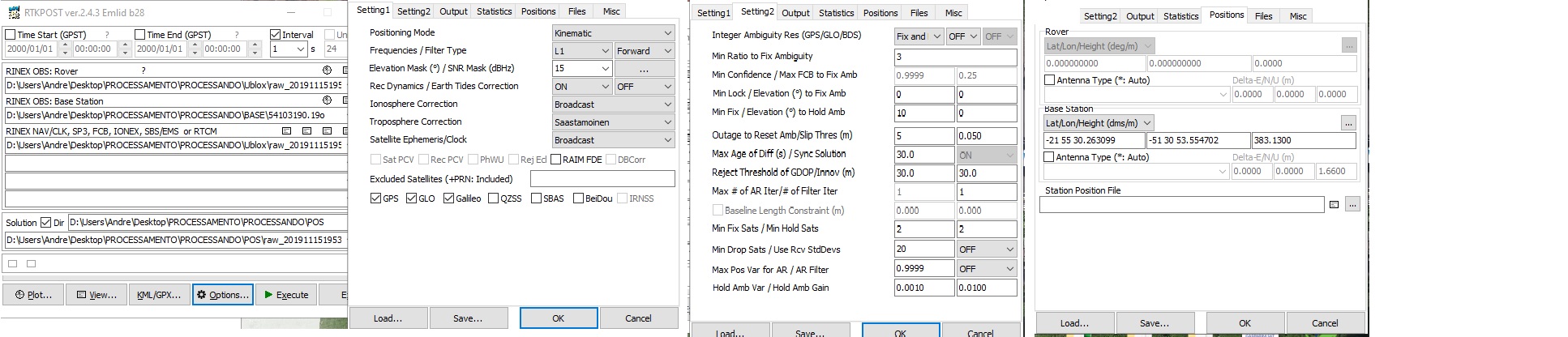
eu utilizei o software (PPK point extractor software) para separar as “leituras”, uma vez que peguei os pontos pelo survey e tenho o inicio e fim de cada.
Analisando o resultado de seu processamento, ao verificar o arquivo .pos, notei que o seu ponto ficou autônomo (Q=5), ou seja, não houve correção. Processei seu arquivo da base no PPP e realizei o pós do rover utilizando o RTKPOST. E processou corretamente, vou te enviar imagens de como eu configurei o RTKPOST. E a baixo eu inseri tanto o ponto da base quanto o do rover no Google Earth Pro, e aparentemente bate com o local certo descrito por você.
Gabriel, obrigado por todo esse tempo que você utilizou.
Fiz a alteração de acordo com as suas configs e TCHANAM !
Muito obrigado, eu só tenho uma dúvida, apenas 1 dos pontos teve 87% “Q1”, ou seja, nenhum deles fixou, certo?
Para utilizar esse método, você costuma ficar quanto tempo no 1 ponto até que fixe e você comece o caminhamento? (pelo meu teste o ponto fixou com 8min aproximadamente)
No caso de coletar em “logs” separados, qual o tempo indicado para que eu fixe um ponto avulso.
Olá André,
Sobre 87% Q=1: No começo do processamento é normal que as ambiguidades não estejam resolvidas então o Q é diferente de 1. Assim que são resolvidas, o Q fica =1.
A respeito do tempo antes de começar o caminhamento, é uma variável difícil pois depende muito do ambiente e distância da base. Se está próximo a base e em um local aberto, este tempo fica inferior a 5 minutos.
Você deve tomar cuidado se passar em locais que terá obstruções nos sinais dos satélites, pois isto causa a perda de ciclo e a solução fixa pode ser perdida.




 era para os pontos estar no “ponto” azul e não próximo a base.
era para os pontos estar no “ponto” azul e não próximo a base.

