I am very new to GPS and processing data so my apologies if I am not clear.
I am doing some preliminary testing with the Emlid Reach rs+ and went through system update just fine and the getting started tutorial. I have had what seems like some success for the last couple weeks. However, this situation pops up frequently:
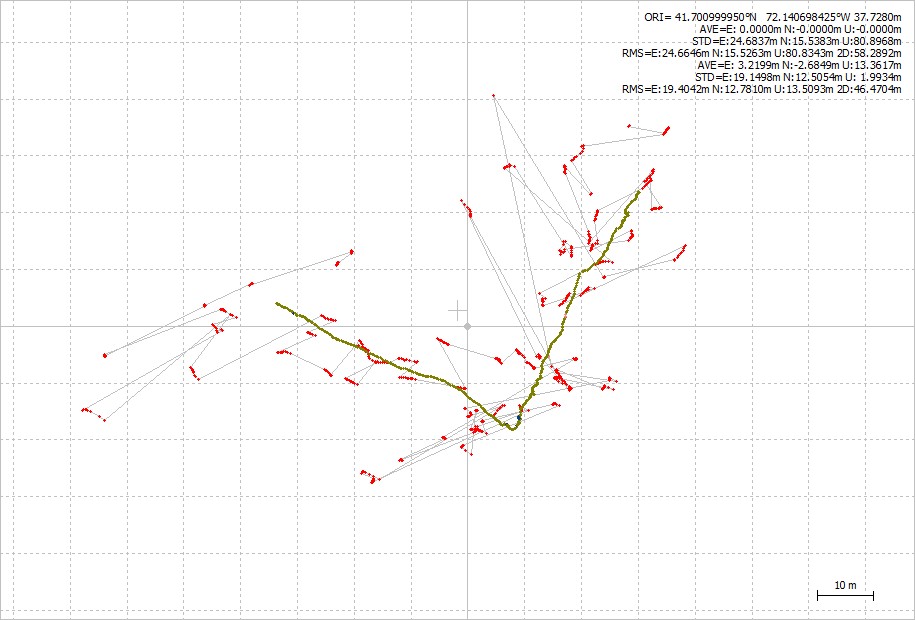
I go through RTKpost in order to convert RINEX files, and but when I ‘drag the .pos file’ to the RTKplot or just click ‘plot’ i get a giant mess and nothing that looks anything like what my walking path was. However, when I ‘drag the .LLH file’ to RTKplot it gives me what looks like a perfect plot of the path I walked. My problem is I need to convert my data into a .GPX file. This is easy in RTKpost but the .POS file is a mess and you can’t do this with a .LLH file.
I’ve never seen the discrepancy this extreme but does anyone know what’s going on just by looking at this image and a usual reason why a .POS file does this after conversion ??
-The green line a plot of the .LLH file and resembles my actual route .
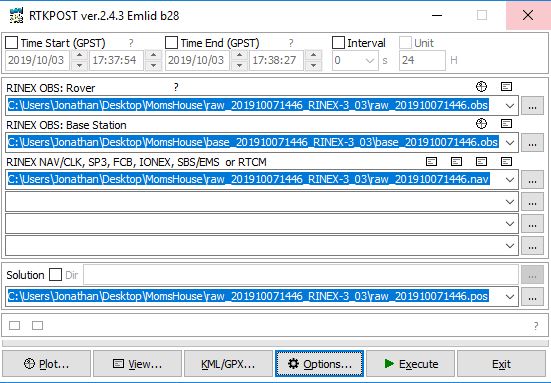
Sure. A picture of the rtkplot is the one in the OP and here is a picture of rtkpost.
I’ve followed the directions to the T, and double checked it just now.
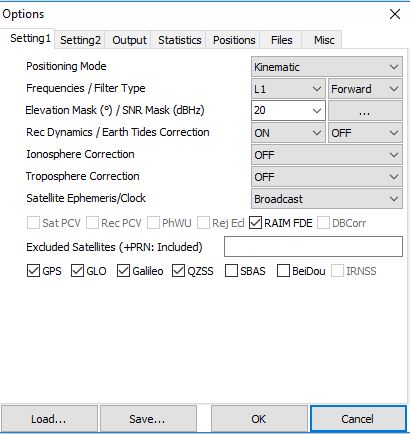
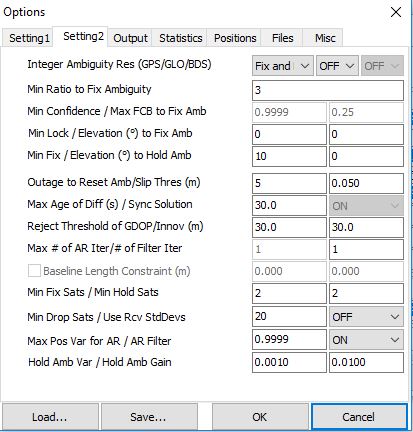
The only settings that look different from what I run is it appears GLONASS AR is off and I have Min Fix/Hold Sats at 3. If AR was off in the RTK settings then you can’t turn it on in RTKPOST, but neither should cause what you are seeing. I only use PPK for my drone so I always run fix-and-hold, but if you are surveying points on the ground I have seen people run Static. Beyond that we will wait for a Ground Survey PPK genius to chime in.
if your doing PPK i think you need to select combined instead of forward.
from the RTKlibExplorer site
This is the direction in time that the kalman filter is run. For real-time processing, “forward” is your only choice. For post-processing, “combined” first runs the filter forward, then backwards and combines the results. …
you just unzip the file and inside there are *.conf files
click on “load…” and you can load them into rtklib
first save your config file so you can compare them in something like winmerge
So when I download my sent my data from Emlid Reach RS+, I get Base .OBS, Raw (Rover) .OBS and .NAV files and I also get a folder that is called ‘Solution’ which contains a .LLH file. That’s the file that when I plot it, it works. This forum will not let me upload it here though. It says .LLH files are not allowed. So included here are Base .OBS, and Raw (Rover) .OBS and .NAV
Hi @fangjian , you only have 2 minutes of observation in your files, and the Base has very few satellites and very poor signal.
My result Q=2 (47.0%) Q=5 (53.0%)
[quote=“gabrielgal76, post:19, topic:16488”]
Hi @fangjian , you only have 2 minutes of observation in your files, and the Base has very few satellites and very poor signal.
My result Q=2 (47.0%) Q=5 (53.0%)[/quote]
Thanks for checking it out.
Before experiments are officially conducted, I’m just going out there and walking clear paths that I can verify afterward with ArcGIS and check its accuracy. I knew that for this one that the satellite signals would be poor because I did not set up the base in a clear area with 30 degree visibility. I was a little shocked at just how off it really was though. Also, the .LLH file was correct (green line in image uploaded earlier) and also the rover said it was in float mode at the time (sub-meter accuracy) so I assume it was getting base corrections. Although just not centimeter accuracy. And does anyone know what the .LLH file is ? Can I use this file and somehow convert it to .GPX ? …