



You are in the USA, check the constellation of GNSS in both the RS+ and the RTKpost, and I would leave at least one hour to the two GPS in a place without obstructions and then do the tests.
Regards
1 Like
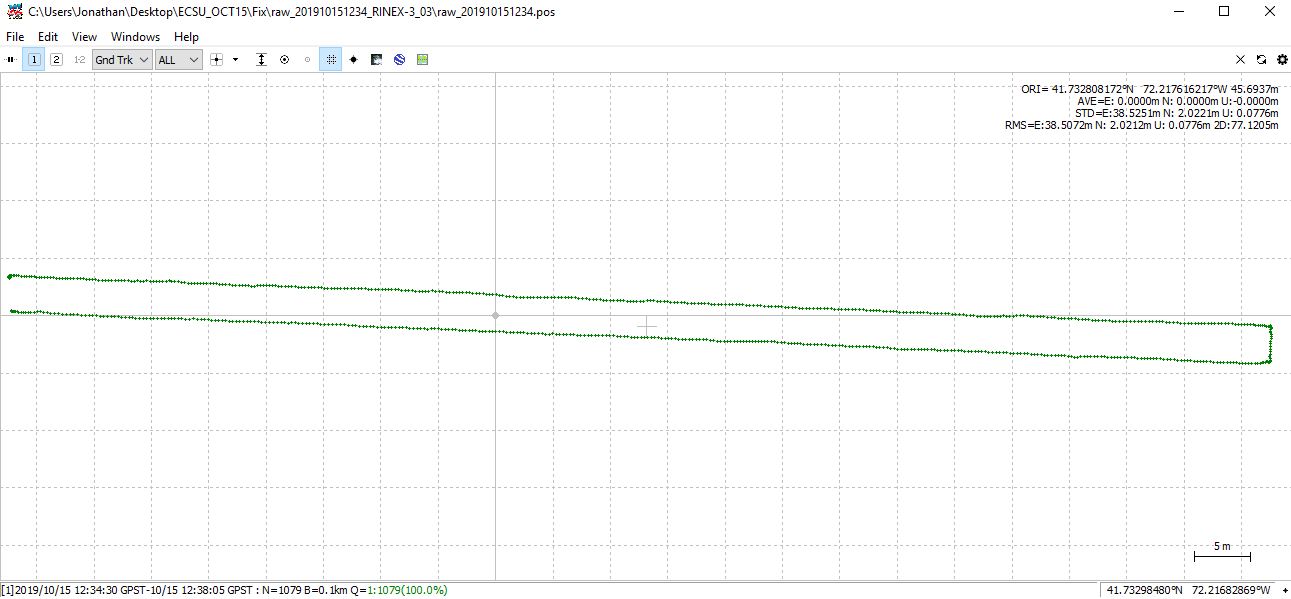
Thanks to everyone for your comments. I did a simple test today at a running track. I walked 100 m up one lane, turned 90 degrees a couple times to walk back down a different lane. The shape of the plot is what I walked. However, when I convert GPX file to a feature/shapefile,project to proper coordinate system on ArcGIS, it appears to be a couple meters or so off. I began to wonder if maybe the .tiff file of the aerial image is just off and the emlid is correct.
But when I checked a coordinate at one of the 90 degree turns I made on Google Maps (or the ArcMap tiff file for that matter), it doesn’t align with the emlid plot. The plotted .pos in RTKLIB is north a couple meters of my actual path. So now I am thinking I have done something wrong either during testing or post processing.
Conditions were perfect during the testing.
Anyone notice anything wrong during post processing?

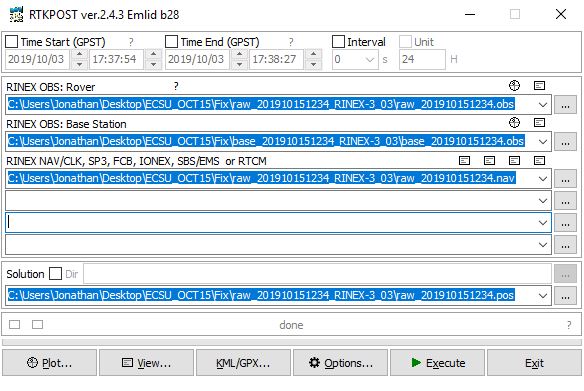

Also here are my files if anyone wants.
base_201910151234.obs (460.0 KB)
raw_201910151234.nav (14.8 KB) raw_201910151234.obs (1.9 MB)
-
Your rover is making an accurate survey in relation to the base coordinate. How did you obtain your base coordinate? Placing the base | Reach RS/RS+
-
Why do you think your survey should align with Google Maps or your GeoTIFF? By that I mean, do you have some data in regard to the accuracy of those products? e.g. A cm-accurate RTK survey is not to be compared against Google Maps. Even though in some places it could be quite accurate, in others it is not even close. And where did the GeoTIFF come from? Did they georeference it to a nearby benchmark with published coordinates? Can you put your base on that point and survey from the same coordinates? Or is the georeferencing just accurate enough to show that the photo is in your country, or within a particular city block, or just as good as a consumer GPS can do?
The questions are not meant to be condesending, but to help break some common assumptions that we all seem to make at first.
4 Likes
Thanks for your comments. I don’t necessarily believe the geotiff is accurate. I would just get different results from the Reach receivers multiple times. Don’t think I explained properly. If I used the geotiff as a base map and did multiple walk throughs on the same path, it would give me slightly differing results on the map. I follow the directions on setting up the base on what I think is the ‘averaged fix and float’ method where it accumulates data upon startup.
The other thing that I find confusing is, when I plot the .pos file, occasionally it will give ridiculous results yet the .llh file looks perfect. Why that is I have no idea. Does anyone know how to get the .llh data and export it? In RTKplot, I clicked on edit tab and ‘solution source’. That’s where all the data is that I can make an excel file out of and then export that to a GIS. But I can’t figure out how to export it. I can’t copy/paste and there’s no options from what I can tell.
As of right now, my ‘Rover’ receiver died a couple days ago and I’m waiting to hear back from Emlid on how to proceed.
you could also possibly pick a point off the geotiff and use that as your base station coordinates. look for something that you can clearly pick a point for and at the same time is a location you can set the base station up on. parking lot lines are good for this. by doing this your effectively geo-referencing your data to the photo.
1 Like
you know you may want to go to the RTKLIB site and get the documentation, you may find it informative. the LLH is just a text file of coordinates, you can read them easily into a spreadsheet or into any GIS.
1 Like
isnt the base .obs usually larger than the rover .obs?
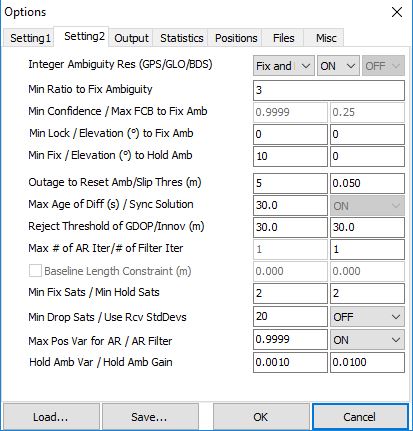
a number of your settings are out of wack.
maybe try posting your .conf file instead of screen shots.
Looking into rtklib.com now. Haven’t found any information just yet though.
As far as the Base .obs being greater in size, I have no idea.
I don’t know what settings are out of wack. Where can I find “the .conf” file so that I can share it ?
Getting back to this. I have a feeling that something is wrong here.
-
When you ‘average’ a base coordinate, it is normally done in ‘single’ mode. If you have incoming corrections from an NTRIP server or another remote base station, then maybe your base would show a status of ‘float’ or ‘fix’. If you do have corrections coming into your base, please say so, otherwise we’ll assume that your base is operating in ‘single’ mode.
-
You only ever average a base coordinate once for any given spot. It is pointless to average it again because you will get a different result every time. You do it once, and then record those coordinates for that spot and use them again each time you place a base station on that spot.
I’m sure you understand that even if your base station is sitting on the same spot as last time, if it thinks it is in a different place, then in surveying the same points as last time, your rover will definitely give a different result. If you want repeatable results, then you need to start at the exact same place with your base, using the exact same coordinates.
1 Like
The rover typically runs at a higher frequency so it is usually larger unless you let the base acquire for hours before you started roving. In our case we run 5hz vs 1hz.
its the documents link at the top of the main page
http://rtklib.com/rtklib_document.htm
use the “save” button on rtkpost
oh that makes sense! i was using 5hz at the rover but found it problematic.
I have been starting up the base (single mode) in different places every time I go out with it. `When I map with the ‘rover’, I often map one path a few times, and then go somewhere new.
Hi Jonathan,
Sorry for the delayed response.
Such a difference between PPK and RTK solution occurs when you use different base positions during computation.
As it was already stated above, when you place the base, it usually finds out its position by averaging in Single mode. After averaging, Reach knows its position with a few-meter accuracy.
As for the rover, it calculates its centimeter-precise position regarding the base position. So, even if rover coordinates are centimeter-accurate in regards to the base’s, they’ll be shifted on the same offset on which base is shifted from the real position on the Earth. Such accuracy is called relative accuracy.
However, if you know the coordinates of the point where the base is placed, you can enter it in manually. In that case, the base position is centimeter-precise regarding the real coordinates on the Earth. So you get absolute accuracy.
In case you use averaging in Single mode to figure out the base position, I’d recommend saving the coordinates of the point you acquire and use it in other surveys to prevent such shifts between different solutions. Also, you should enter the same coordinates in the RTKPost Options/Positions/Base Station position manually before PPK.
You can read more about Placing the base in this docs entry.
Also, I’d like to clarify what’s the difference between POS and LLH files.
POS is the format in which RTKLib saves the PPK solution. LLH is a format that Reach uses to record the RTK solution. There is no essential difference between these formats, and it should be possible to open LLH files as POS in RTKLib.
You also can convert both LLH and POS files to GPX in RTKPost if it’s needed. Just click on the KML/GPX converter button and browse for the LLH/POS file you need in the Input/Output/GE Exe File field to open it. Then you can click on the Convert button to accomplish this (check the screenshot below).
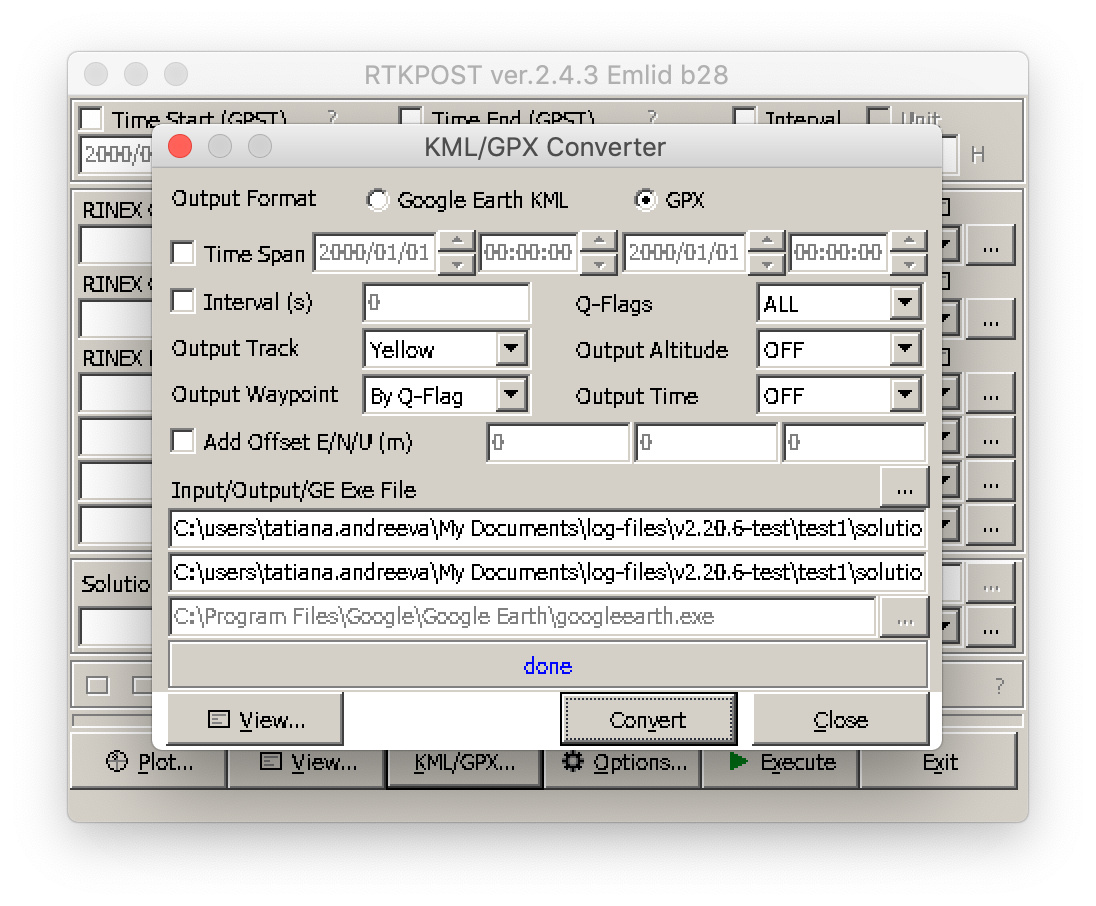
Hope this will clarify things a bit.
3 Likes
Thank you every for all of your comments. They were all very helpful in clearing up my misunderstandings.
Anyone know how to show the position of the base in RTKPLOT ?
Also, since I will be converting to GPX, is there a setting for that?
Haven’t seen anything in the tutorial or in the settings and options.
Hi Jonathan,
Click on the Show map/Waypoint button to display the Base position. I marked it with red on the screenshot below:
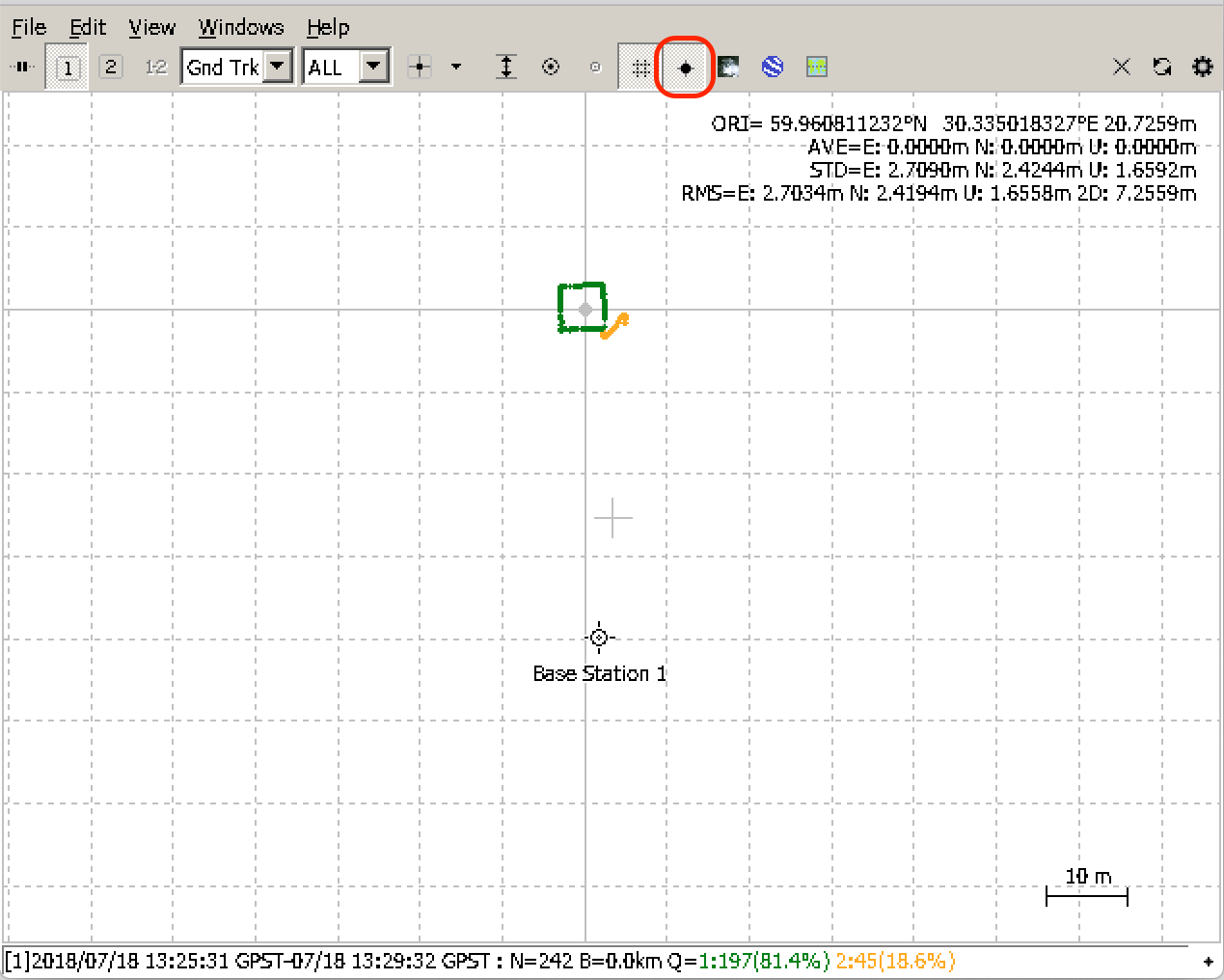
Could you please clarify which settings do you mean?
Weird. I remembered that it was one of those buttons. I’ve tried that and it doesn’t show the base position. I am well within the range of where it would be as well. Nothing pops up.
What I meant was, when I export it as a GPX file, would it bring the ‘Base Station Position’ marker into that file as well. Or only just the rover positions.
Hi @fangjian,
Could you specify which RTKLib version do you use? Can you share your solution file so I can make sure it includes the base coordinates?
I’ve just converted the pos file to GPS, and it seems the GPX file contains the base coordinates. It should be named as a Reference Position in the file.
1 Like
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.