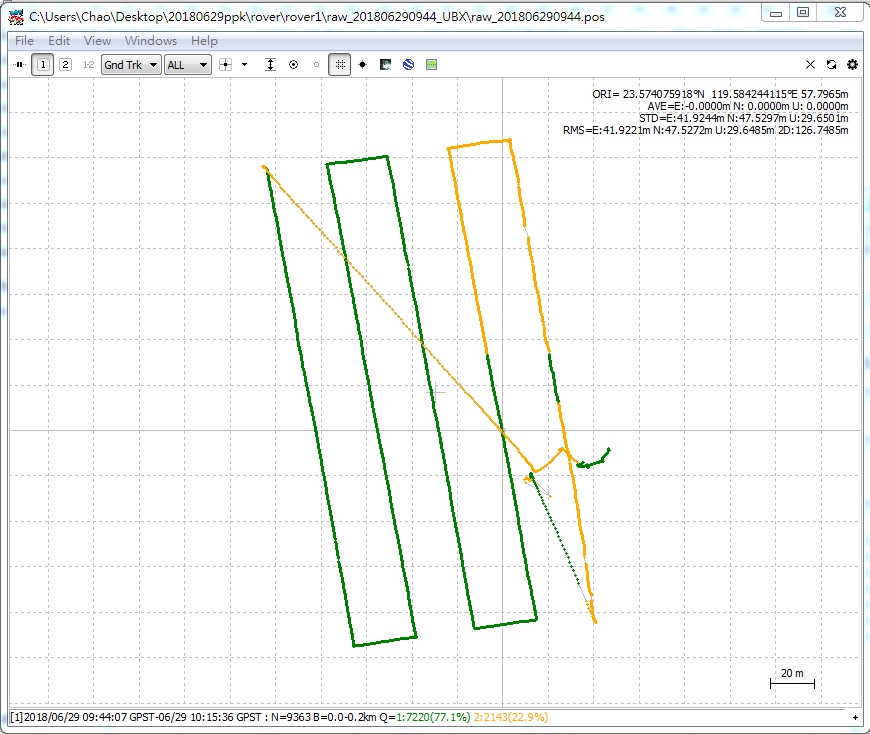
The following is my RTKPOST (ver2.4.3 Emlid b28) setting:
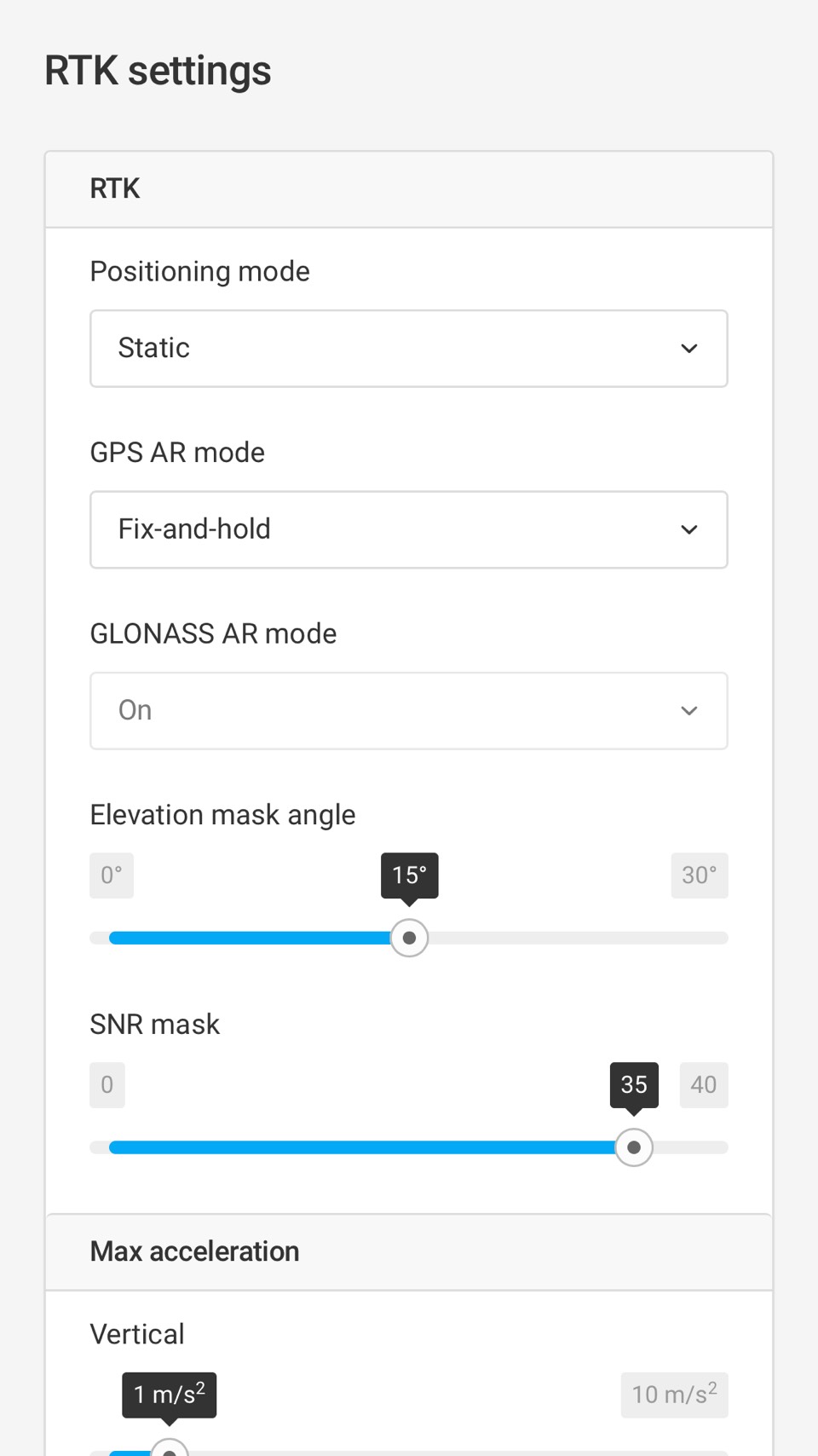
The following is my Reach Rs and Reach’s ReachViewApp setting:
o Position Mode: static
o GPS AR mode: Fix-and-hold
o GLONASS AR mode:on
o Elevation mask angle: 15
o SNR mask: 35
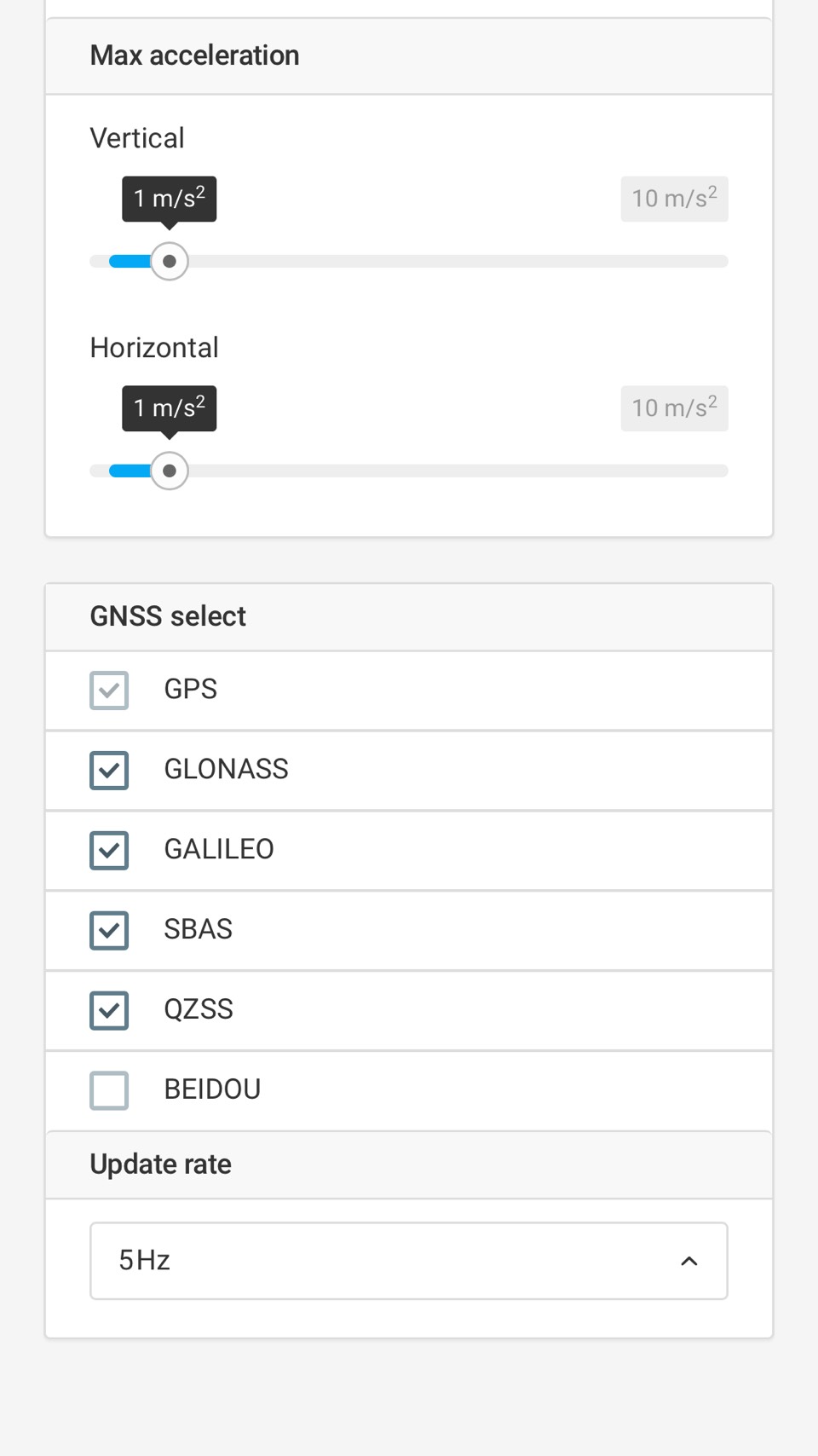
o Used positioning systems: gps, sbas, glo, galilo
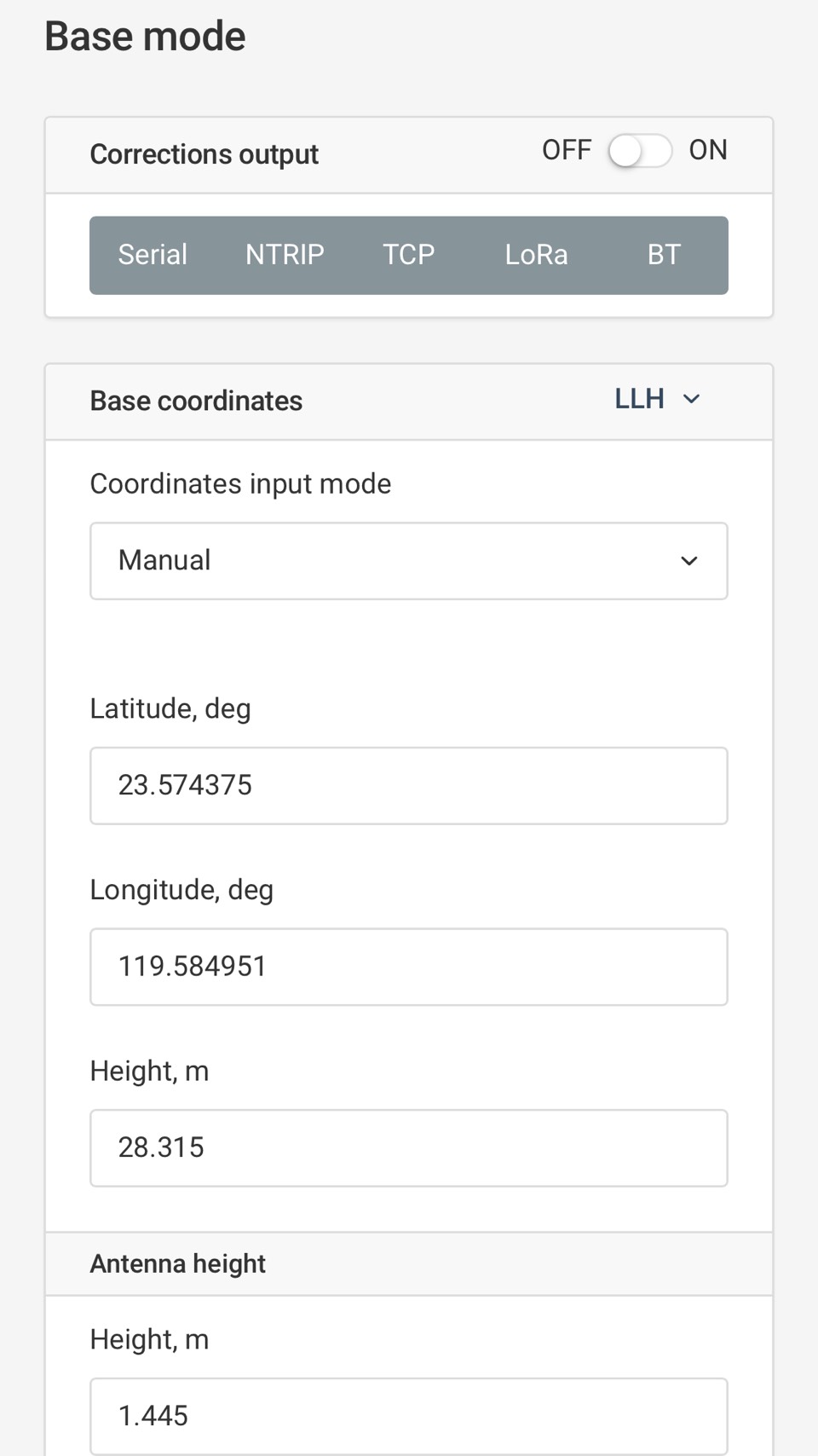
o Base mode–>base corrdinates input mode–> Manual
As I can see from your raw logs, there is a poor satellite visibility for both the rover and the base. In what type of environment did you test your Reach?
In regards to ReachView app settings, there is a guide on the forum providing a detailed information of settings for PPK.
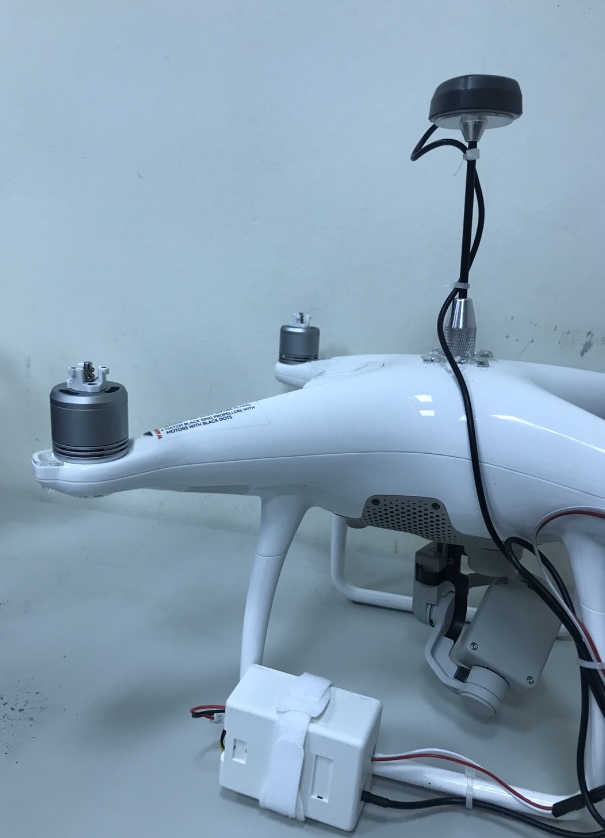
Also, could you please share an image of Reach hardware setup?
I highly recommend you to increase your antenna ground plane and to try isolating Reach from noise/interference. Phantom may be really noisy during the flight. You can use aluminum foil to shield the box with the receiver.
The base log is not perfect as well. Try to set up base in different place and record the new sample dataset please.