Good Evening,
We want to use the RS2+ Sensor for generating Localization Data while it is mounted on a moving robot.
So that means, we want to configure the sensors settings and receive data by executing a program in our ROS2 Humble Node. While also contuniously charging the sensor so that it can be used for a long time.
Regarding Correction Data, we want to use NTRIP. So that would be something we would like to set by configuring the sensor.
The following topics are still unknown to us:
How can you connect a PC with the sensor while charging it?
What would be the recommended connection type?
We read about USB-C to Ethernet in this forum USB-C to Ethernet and also in this one: RS2 Connection to Laptop.
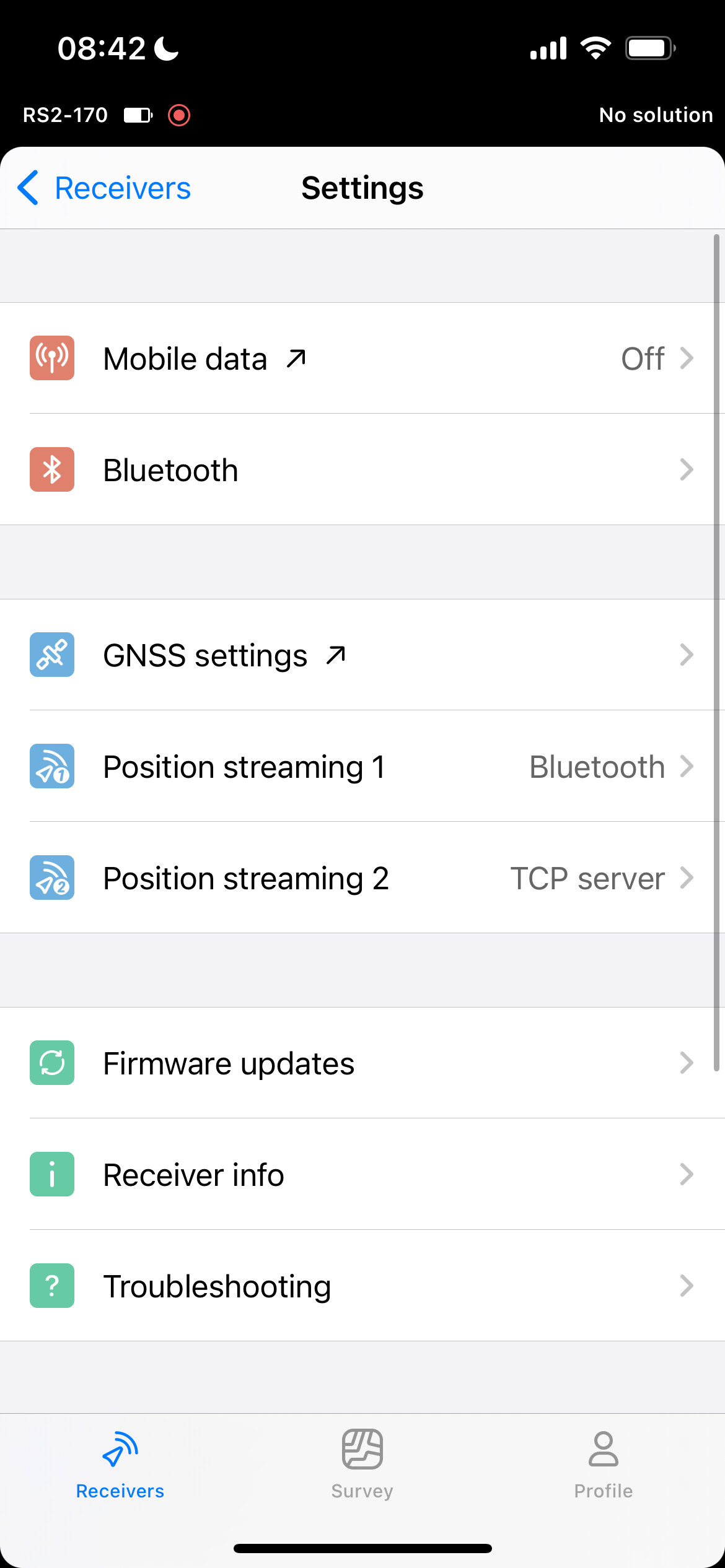
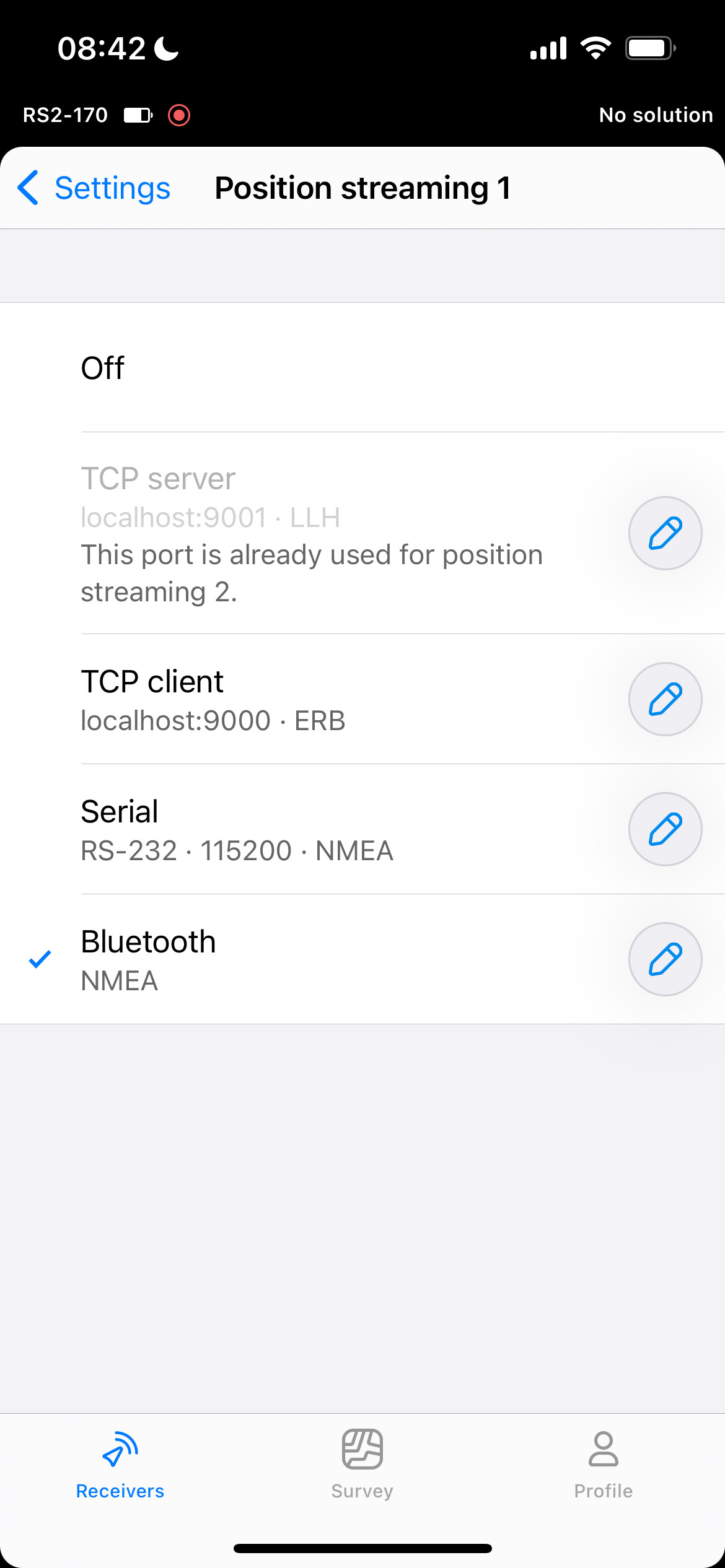
Is there a way to configure the sensor by using that connection and not the app?
More precisely, what kind of message should be sent to sensor for the configuration?
Appreciate any kind of help, so thanks in adavance.