Another DIY project and alternativ way to survey offset point. This applies to survey a point in a difficult location or bad GNSS area. Stakout works almost the same but in the reversed order.
App used:
-Q-cogo
-Mobile cogo
-mobile topographer
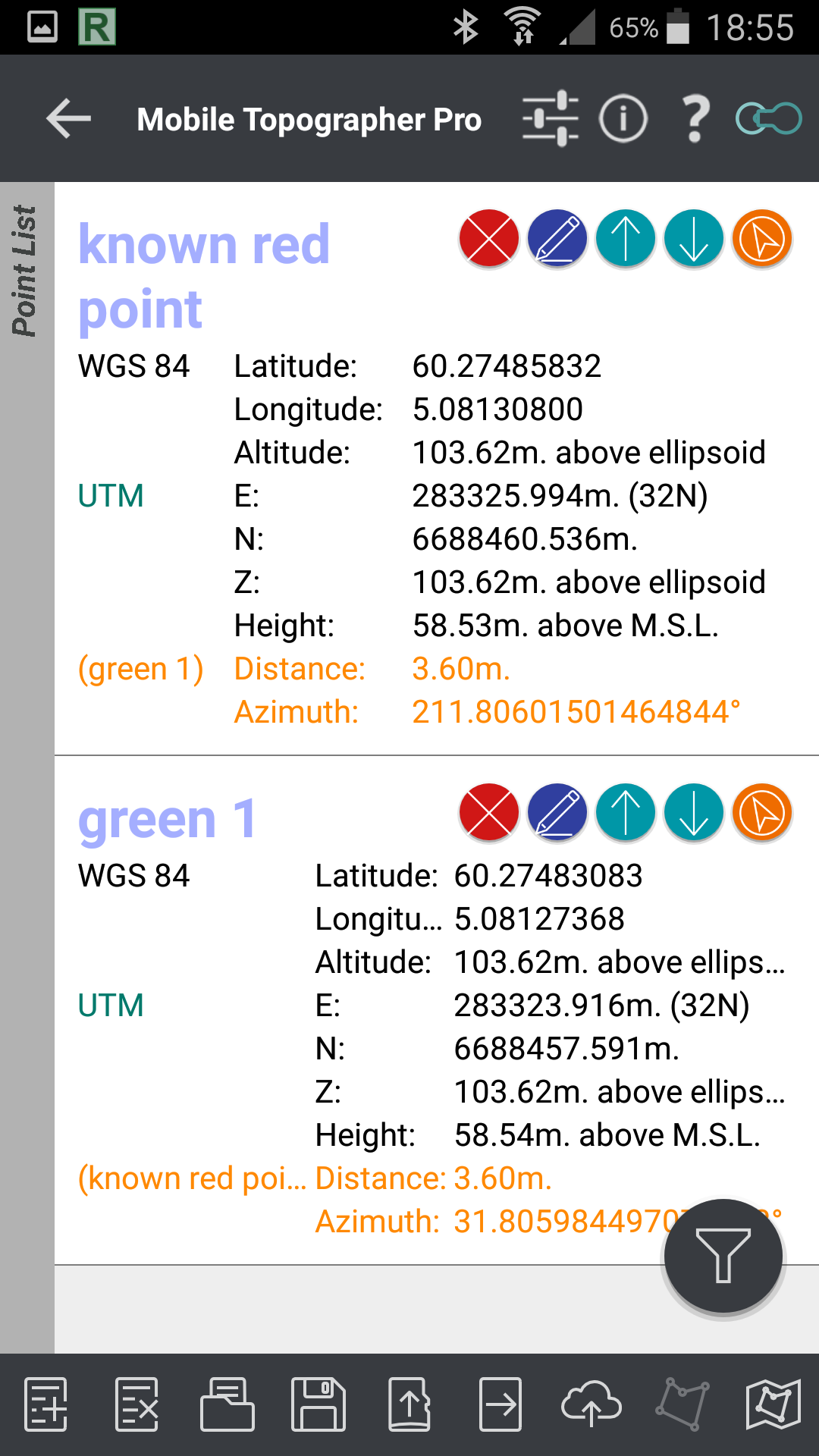
One thing to notice in mobile topographer, is distance between point is located in point list. Nice feature.
-Lefebure ntrip
Both apps can be used on site to calculate new uknown position on the fly.
Tools used: 2x Reach RS, 1x Leica Disto D510, and some adapters to fit Lleica to the pole, also support legs is nice to get the accuracy needed.
You could use a different laser, but the model i used has option to set offset distance, built in camera for tricky targets and most important a buildt in 360° tilt sensor to calculate true horizontal distance on the fly.
Scenario: You have a point you need coordinates for, but there i no satellite view or the signal is to bad or the location is tricky to reach, what do you do? Well, you could survey with offset. This is a bit eyeballing and the accuracy you get may depend on alot of things, but with some care and well placed tools you should be able to get within few cm accuracy.
Here i have a scene. I used red and green cones to visualize my targets better. The red one is the point i like to survey and for the sake of argument, this points is surveyed and to be compared with the result.
I used Reach RS base in average single and all measures made is only relative to the base. It works the same with absolute values too. This setup assume you have the basic knowledge on how to setup RTK, if not start here









Her is the red cone beside the target (a rock i like to survey). I used a cardboard to better see the laser on a bright sunny day.





For the Leica and how to set the offset value when measuring with the laser, i measure the distance from the refrence point on the Leica to the center of the pole, which in this case is 145mm. I then apply this in the menu. So when i use the laser and measure a value, this value show me the distance from laser target to center pole without needing to calculate anything further.




For refrence, this is the unknown point been survey. Named known point red

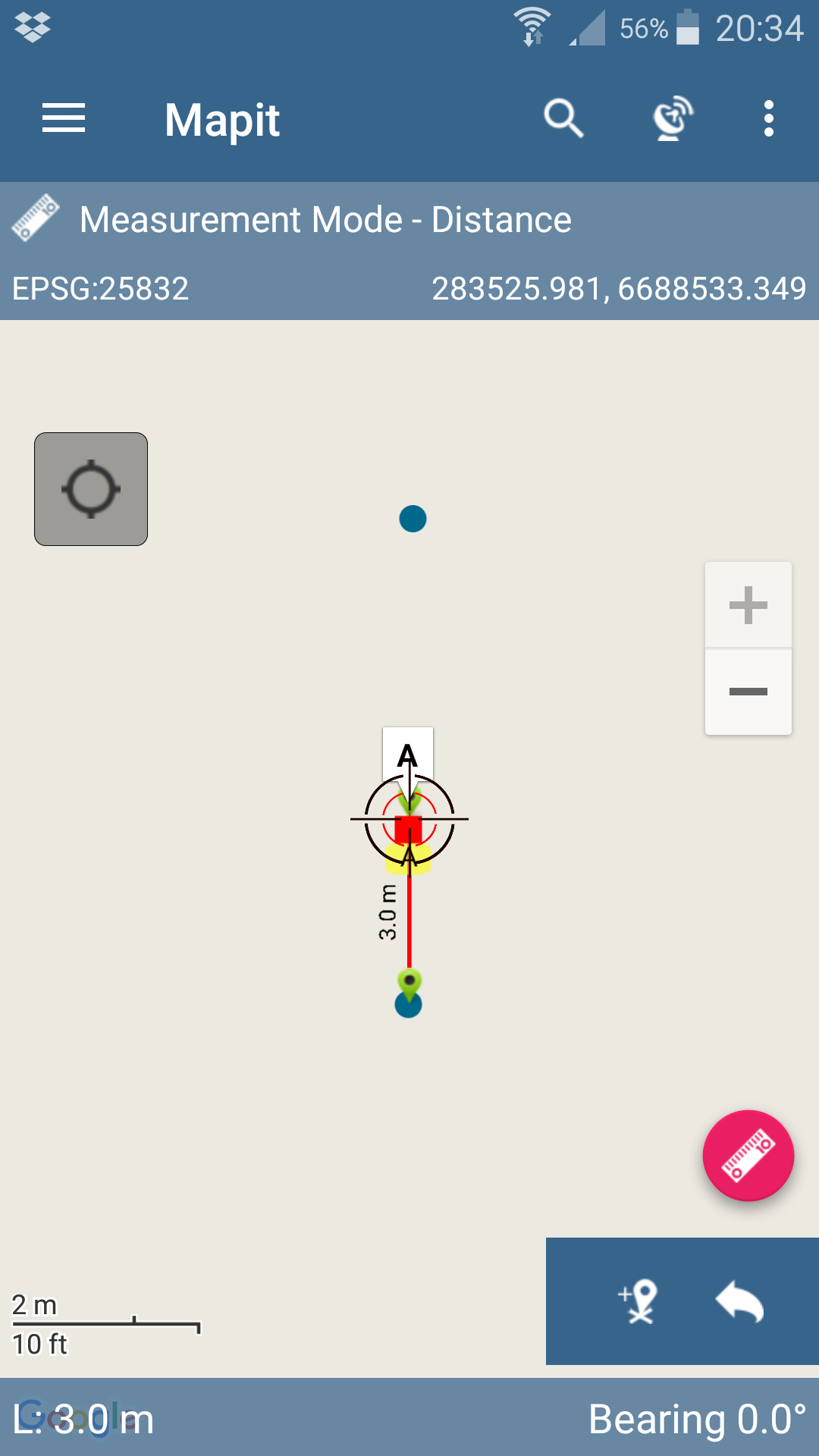
First step is to survey a point as close as you can to the unknown point, i have placed a green cone to illustrate where i did it. I then use the laser to measure distance from center pole to the red cone where i have placed a cardboard to mark the spot. Laser tells me its 3,621m true horizontal distance and its confirmed with a measuring tape ( its only 3m long so i had to ad the rest with a second measure). Close enough for me.










I now have distance and coordinates for a second point, illustrated with a green cone. I named this point Green 1 and it has a distance of 3,621m to uknown point (red cone).
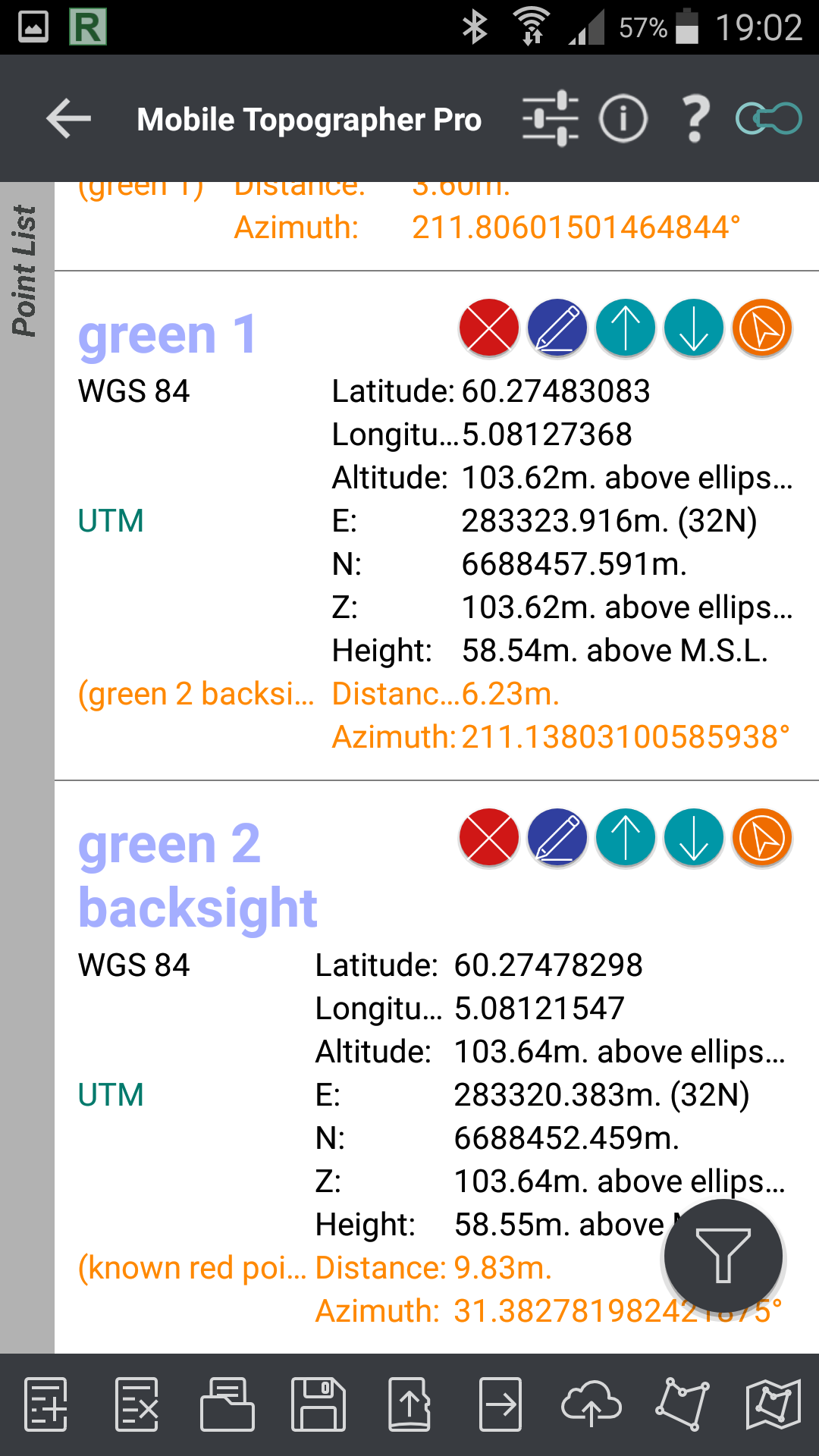
Next, i need a backsight to line up with Green 1 so it hits red cone perfectly.
I use a second green cone and place it by eyeballing it behind green cone nr 1 but with a greate distance to have a better aim at where red cone is located. If you place green nr 2 to close to green nr 1, you may find your measurment to be more out of center due to nature of geometry. Anyways, i usually double the distance between green point 1 and backsight in refrence to the distance between uknown point and point nr 1.



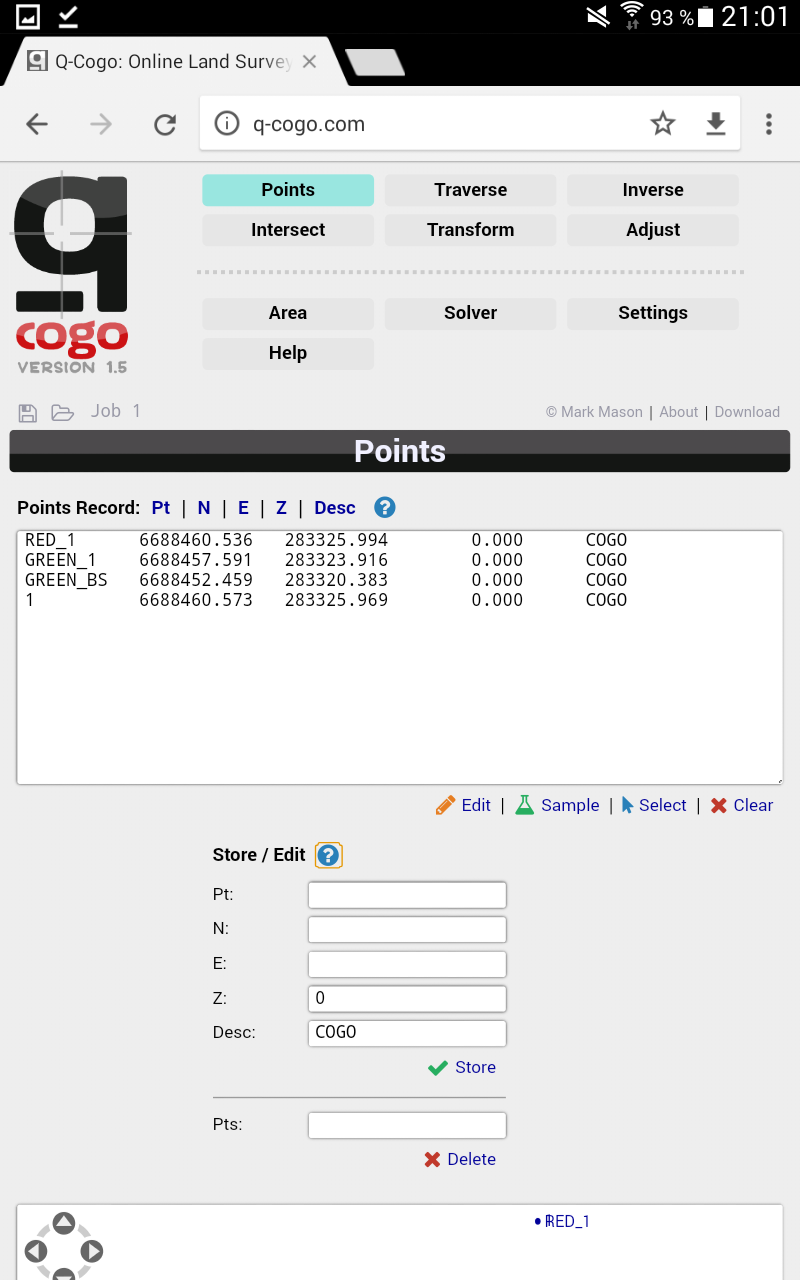
Here is screenshot showing coordinates of all points.
Red uknonwn point
Green 1
Green 2 known as backsight.
Now that we have 2 points with distance to uknown point, we can use cogo tool to calculate coordinates for uknown point. We use UTM system and here where i live, we use zone nr 32 North.
Q-cogo is a online tool (you could download and use offline too) open with your brower, i would recommend Chrome for this.


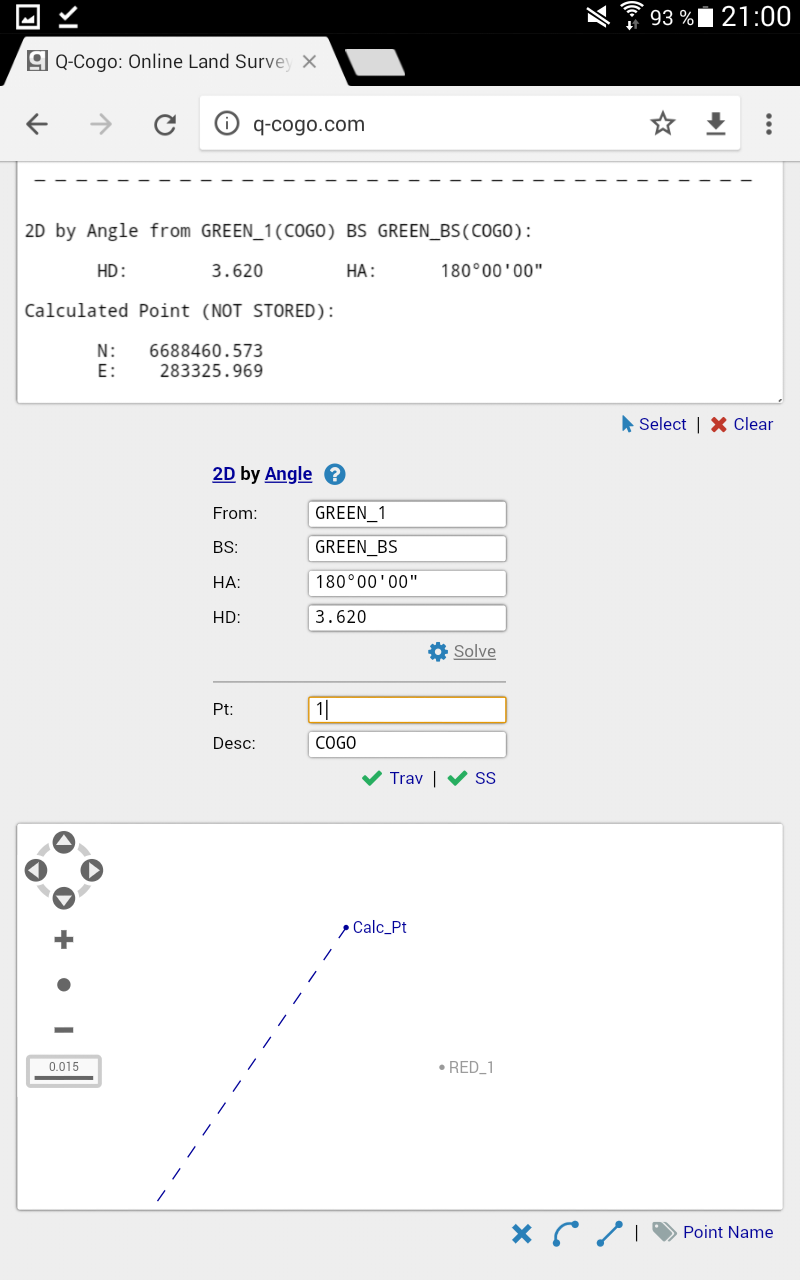
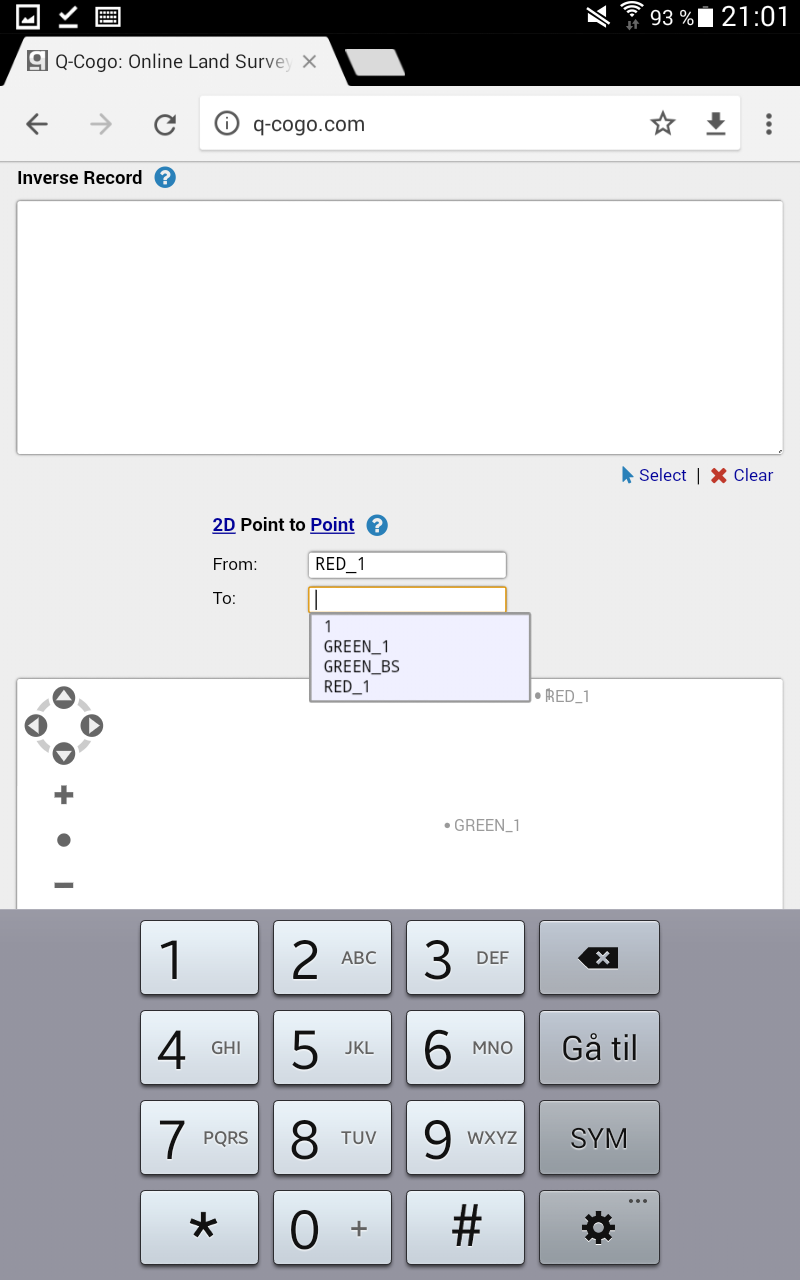
We use traverse to find Red1 (unknown point).
From is Green point 1
BS is backsight
HA is heading azimuth (heading direction. We go straight forward and use 180 degree for that)
HD is heading distance (distance from Green point nr 1 to red uknown point 1
See pic

Next i compared result with survey data and i see i am of with 4,5cm. With a bit more thorough survey and aiming, i could have done this better, but good enough for me here.
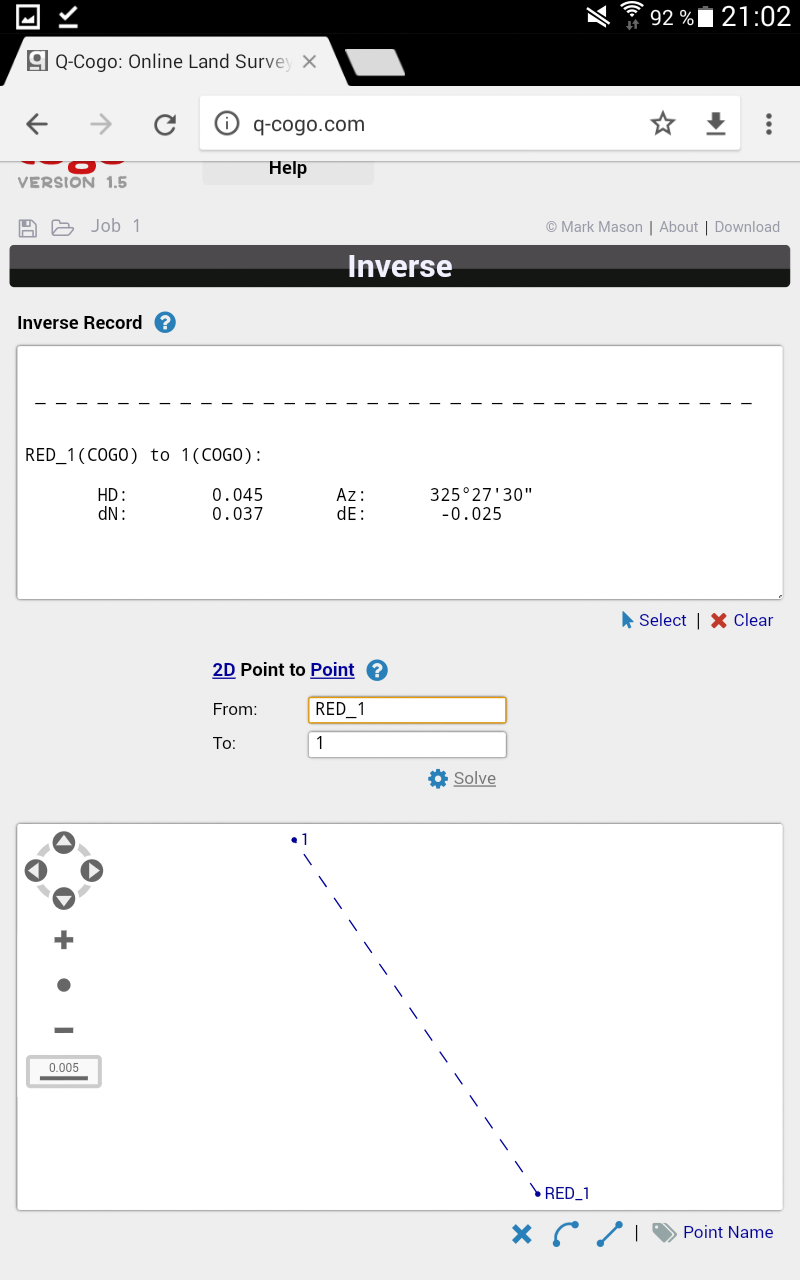
Have fun