After some months waiting for the new stable version, I updated RS2 to firmware 2.24
I mounted the RS2 on a static point on a tripod and connected it via NTRIP to my nearest Caster (53 km) with a SIM card and mobile data, and left the RS2 there for almost 2 hours (until the rain came) .
First it took almost 20/30 minutes to get FIX, and then I expected the Z value to stay the same, or change a small amount, but for 75 minutes I could see a difference of about 1m between the minimum and maximum Z value. All the time, the RS2 at the same point and FIXED solution.
Z value for “Position” from the “Solution LLH” file. 1m difference over time
These are the values of points recorded with Reachview 3 every 15/20 minutes:
I know I am on the NTRIP limits with 53km, but it is the closest station I have and I was not expecting such differences.
Is that normal?
Can I improve it?
If I buy another RS2 (I´m not sure at the moment), can I expect the same performance or using 2 equal antennas and shorter distances may be better and I’ll have reliable RTK?
I’m running these tests to see if I can trust RTK for real work.
Here are the “base”, “solution” and “raw” files from RS2 and the Obs/nav files from the 53km Base. https://we.tl/t-mvqfD4XnYR
I did the same test with 2 brand-name receivers. A Sokkia GSR2700ISX and a Spectra Precision Epoch 35. Both are based on the same Novatel OEMV board.
I connected both to my local NTRIP COORS which was sending corrections from a VRS that was about 5km from the receivers.
I collected points for about 2 hours in 10 sec interval and then did a simple statistical analysis.
The variation in Z was about 12cm in one occasion.
The next test was by using sokkia as base station and epoch 35 as rover. The baseline was 1km.
The results was much better by reducing the Z variation in 6cm.
I attach the tests. epoch-sokkia-test.zip (59.6 KB)
A 53km baseline is very long even for a multifrequency system but I think the variation of 1m is too much. Maybe the Internet connection was not very good?
Anyway by using small baselines you will get better results for sure.
Maybe someone with 2 RS2’s can give us some light?
Yes @wizprod and @svetlana.nikolenko, the Rover Obs file has GPS and GLO because when I converted the UBX file I selected that 2 constellations, that are the same that the Ntrip Base transmits. The RS2 had all constellations enabled.
Thanks @vgo195 for your tests, I’ll take a look at them. And that´s the big question I have: what results would I get using 2 RS2 at a distance of 2/3km (usual ranges in my jobs) running the same test? As you say, someone with 2 RS2 maybe can give us their opinion.
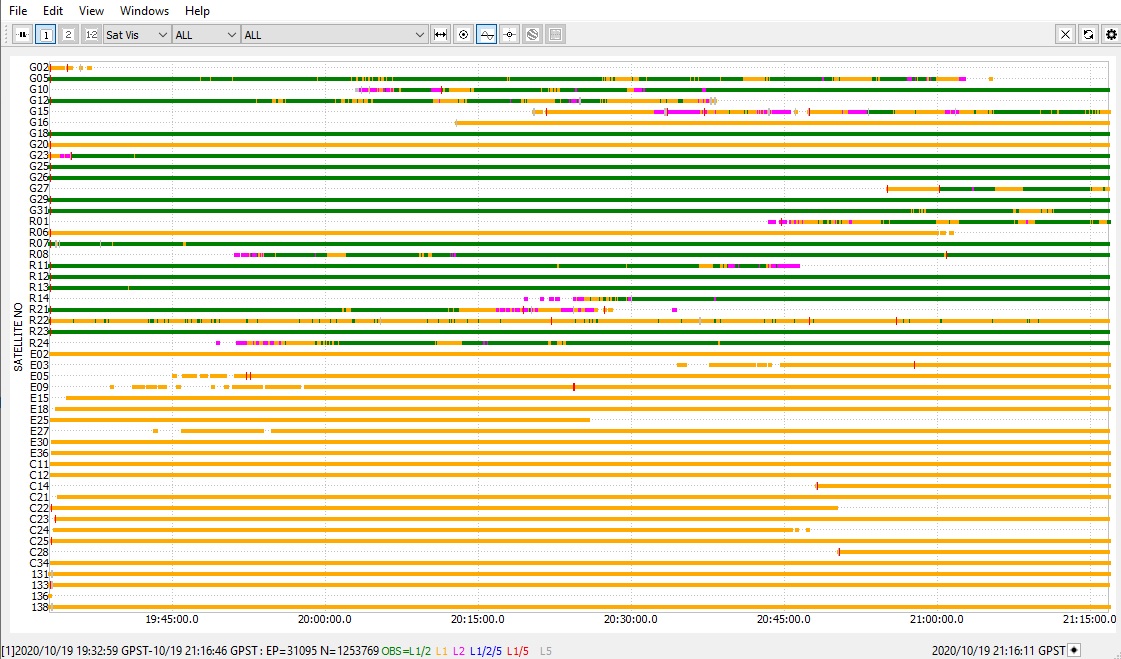
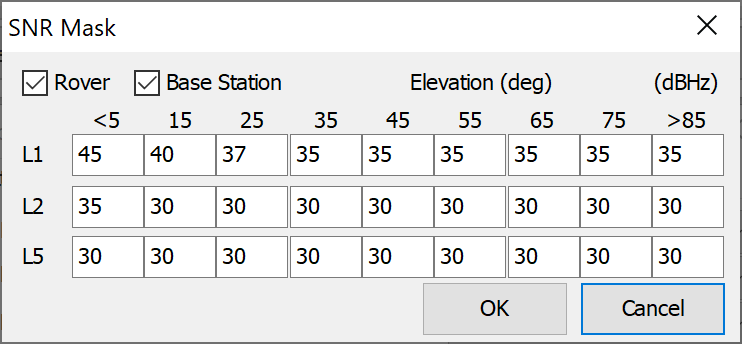
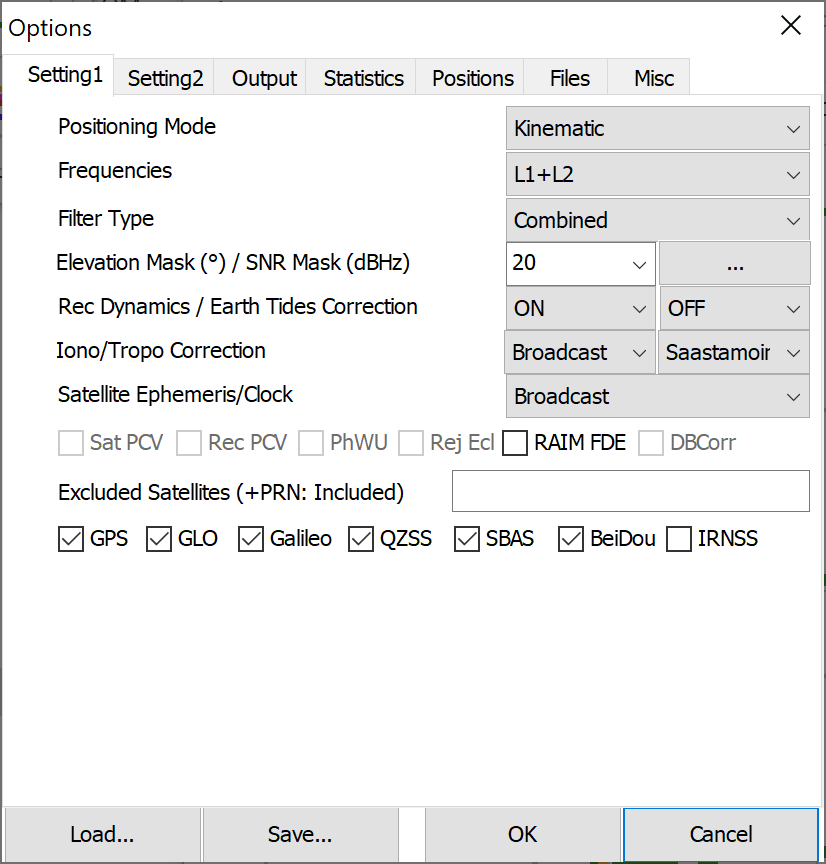
Just tried again, tweaking the angle mask to 20 deg, and processing as kinematic instead of static did something. Now up to 75% ish fix rate.
But from 20:45 it gets wonky and floaty again.
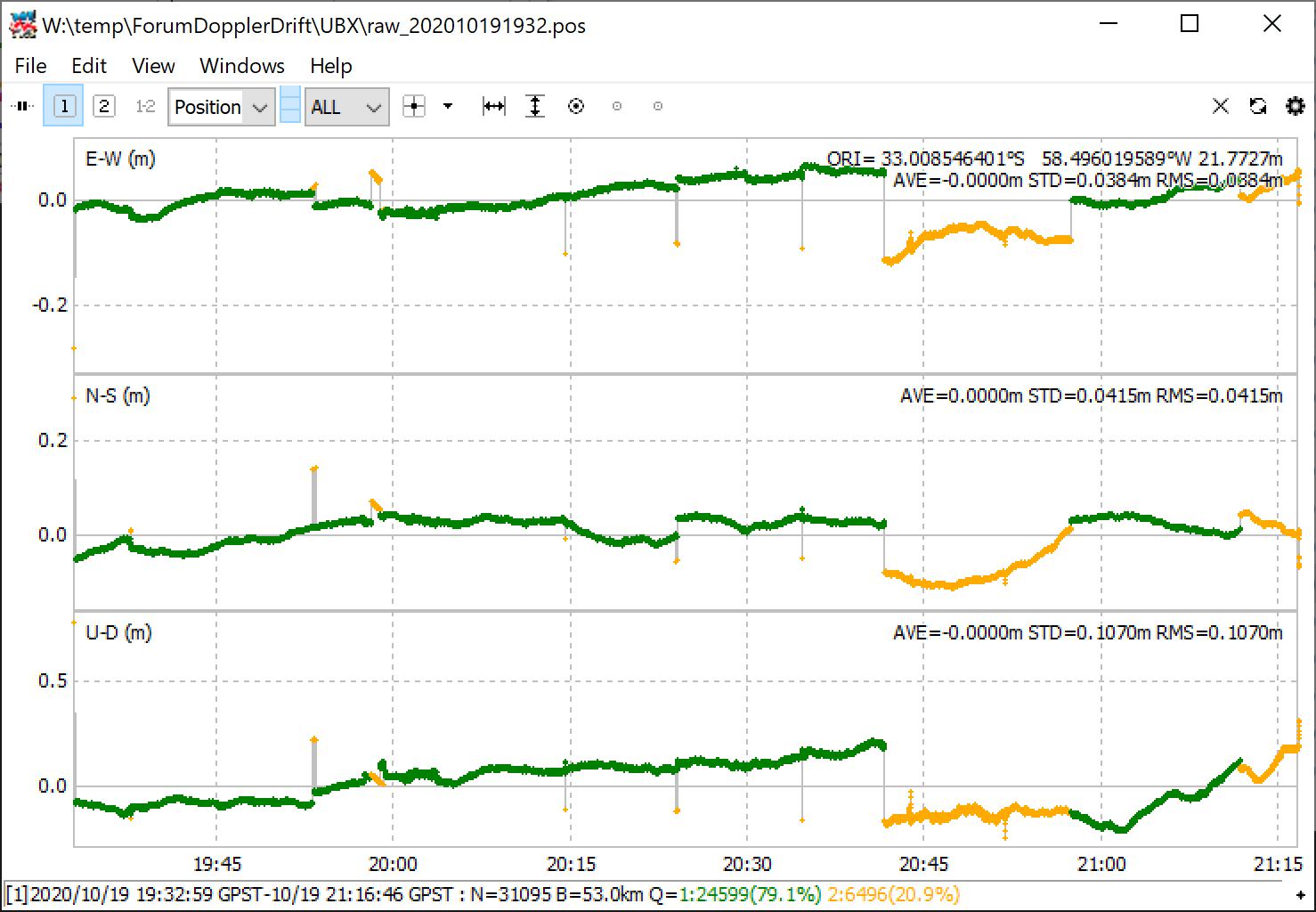
It seems that the variation in Z after post-processing is about 30/40cm, while in RTK was about 1m. It´s better, but still not a good variation for a “Fix” solution.
And about PDOP, when I can I will try to repeat the test to see if I get a better geometry of the satellites. I don´t remember right now, but does Reachview have an indicator of PDOP while doing RTK?
About PDOP value, Reachview 2 shows it, while Reachview 3 doesn’t (or I couldn’t find it).
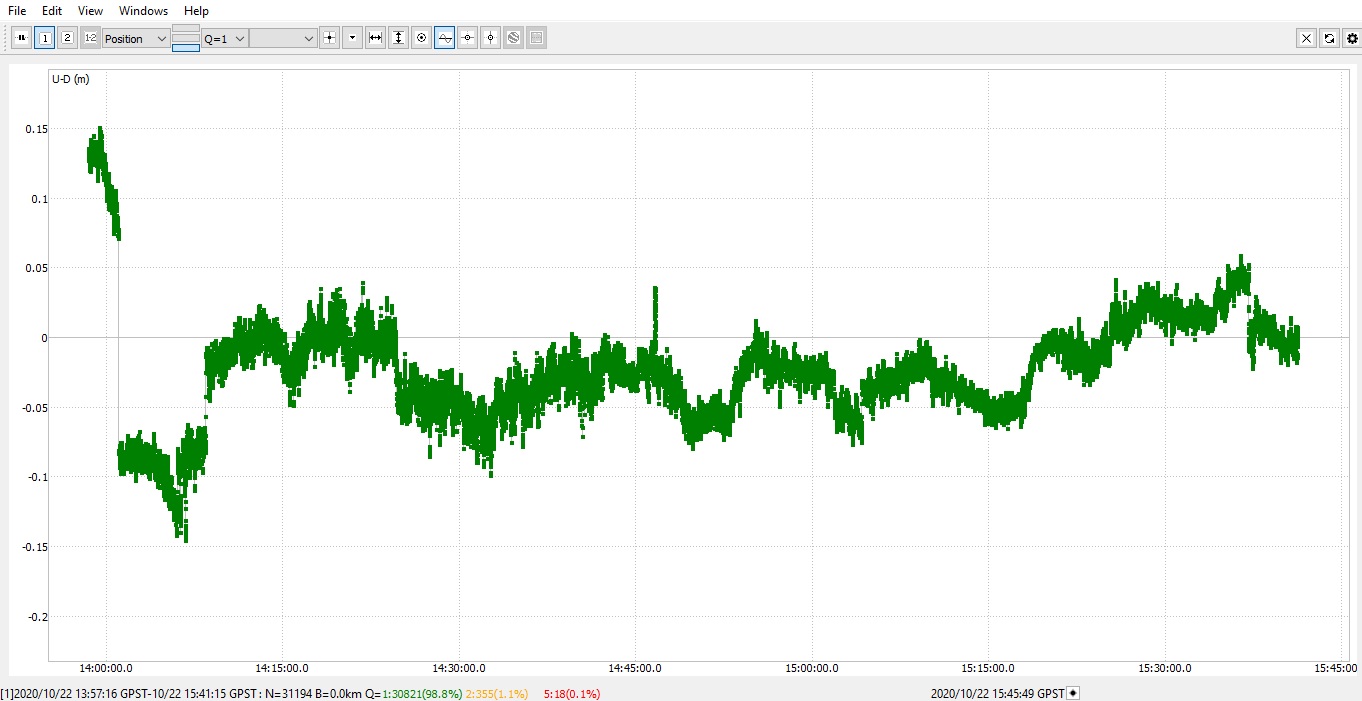
I run the same test again. This time Fix was faster. The RS2 was static on the same point for about 1:40 hour, and now variation in Z was less than the first test. There is a “jump” at the beginning and from 14:07 the maximum variation is about 15cm.
It´s not perfect, but for 53km baseline maybe is reasonable. Variaton in E/N is about 4-6 cm.
Z value for “Position” from the “Solution LLH” file. 15cm difference over time.
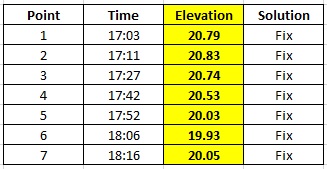
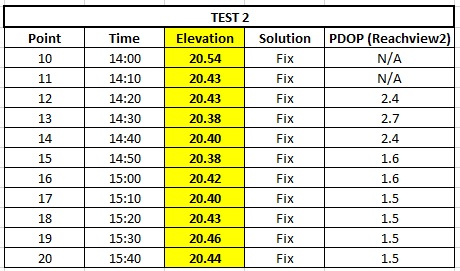
These are the point values recorded with Reachview 3 every 10 minutes:
Post-proccesing the files, the Height value for the point is 20.53, so the question that I still have is:
Why running the same test twice give so different results? I mean, in test 1 I had almost all the time a FIX, but with 1m difference in height. Same location, point and Ntrip base as in test 2.
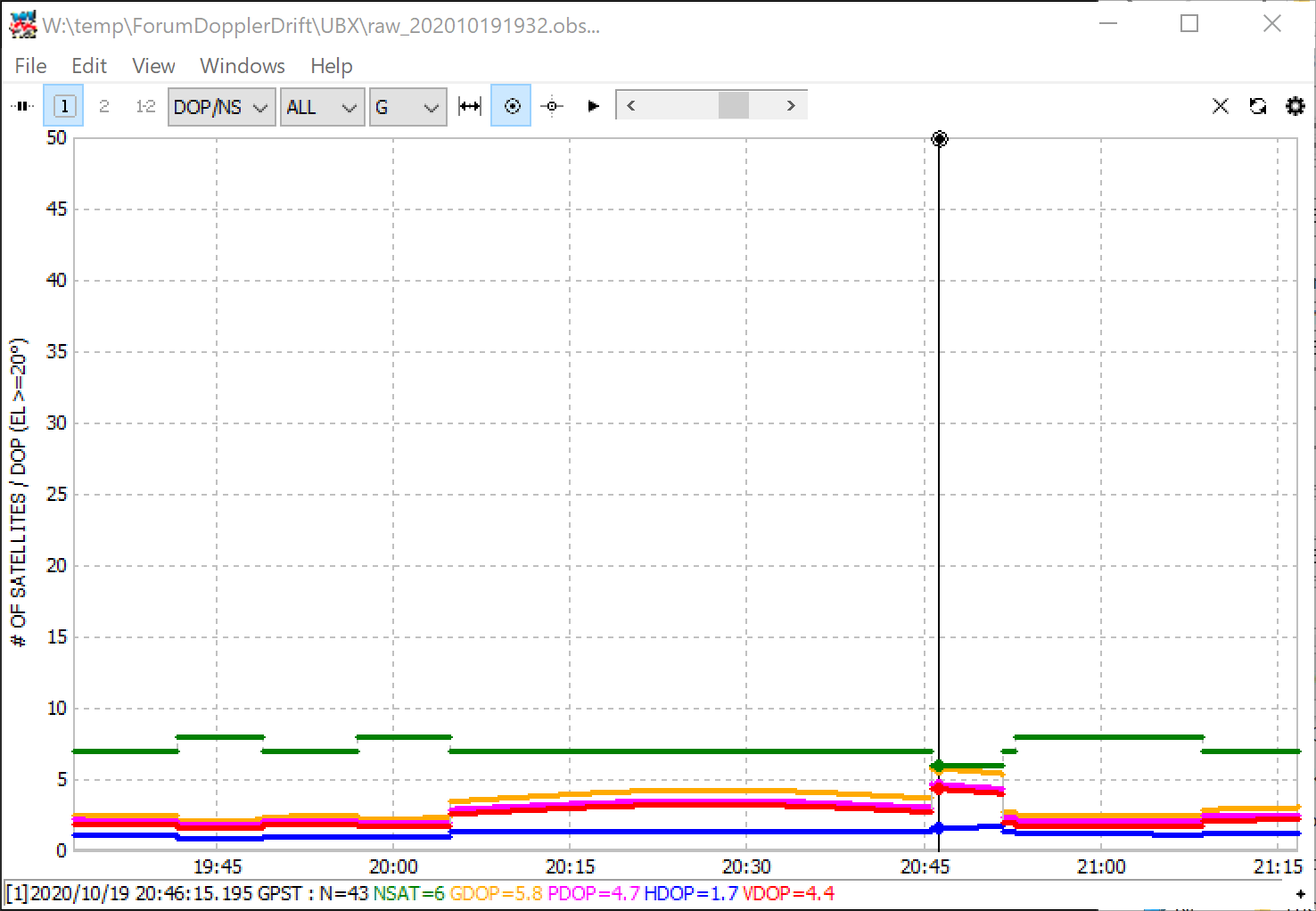
this one seems to process much easier. However, Looking at GPS alone, you still have issues with your PDOP.
However, I still think it somehow the ntrip playing up. Can you get between 2 CORS and process against both in PP?