I’d like to clarify some points regarding conversion ETRS89 data to WGS84.
Both RTKLib and ReachView calculate a rover’s position relying on a base’s coordinates. Basically, the rover knows the centimeter-accurate distance to the base while it’s maintaining the fixed solution.
If the base position is shifted on some offset from the real point on Earth, all rover’s coordinates will be shifted on the same offset too. That means that if the base’s position is specified in WGS84, all the rover’s measurements will be in WGS84 too. If the base coordinates are specified in ETRS89, all the rover’s measurements will be in that coordinate system too, even if ReachView and RTKLib will consider it as WGS84.
Sorry for misleading you earlier! I hope this explanation will clarify things a bit.
Base RS2 - receives real time corrections with NTRIP in ETRS89
M+ on drone (without correction input) for PPK Mapping
Procedure for PPK Mapping:
Simply correct M+ Rover data in RTKpos with RS2 data --> that’s it?
It has been proposed to use the position from RS2 base (from survey mode or also from RINEX raw logs header) for RTKpos position of base. — If I understand you correctly, this is not necessary?
Results will all be automatically in ETRS84, correct?
That depends id you have corrected it in the previous run? You should never double process the antenna height so to speak.
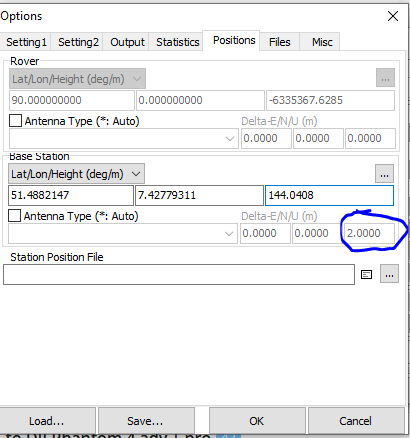
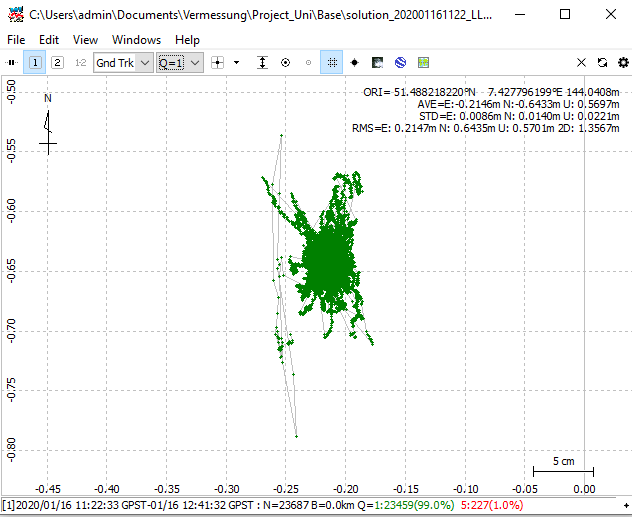
I usually process the base point, so I have the resulting point’s altitude without any antenna-height. That means that I always enter the antenna-heights when processing.
In this example, the data shown in RTKplot are from the solution file .pos that I donwloaded from Reachview. To my understanding that would mean that, this is the z-position of the antenna, meaning that I have to correct for that in RTKpos when PPK the rover data.
Yes, you’re right, you should specify the antenna height in this case. Please note that antenna height is considered as pole/tripod height plus 0.134 m (the distance from the antenna’s bottom to Reach’s bottom).