I have recently tried two different kind off PPK kit - Mettatech and Tuffwing.
After analysis by the forum professionals, both kits have had noise issues.
It is either the M+ or the drone since the kit has changed.
I thought I would start a new thread to discuss this (while keeping my PPK thread separate). It might help with future issues and searches.
I fly a mine site, about 45kms from anywhere, so no environmental noise is present that I am aware of.
I intend to run my Mettatec setup with M+ outside my house:
Running on it own, no drone attached
Running with drone attached but not turned out
Running with drone attached, turned on but not spun up
Running with drone attached, idling
Running with drone attached and hovering.
Running with drone attached and tinfoil wrapped around.
I’ll run 20minutes on each test and restart the M+ when finished.
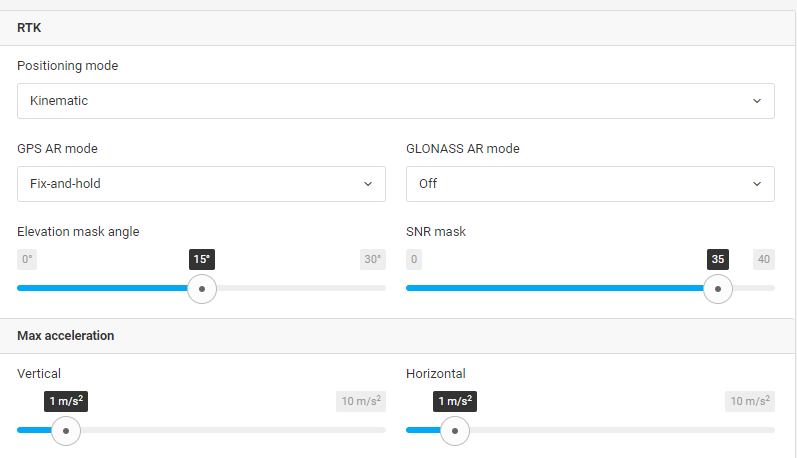
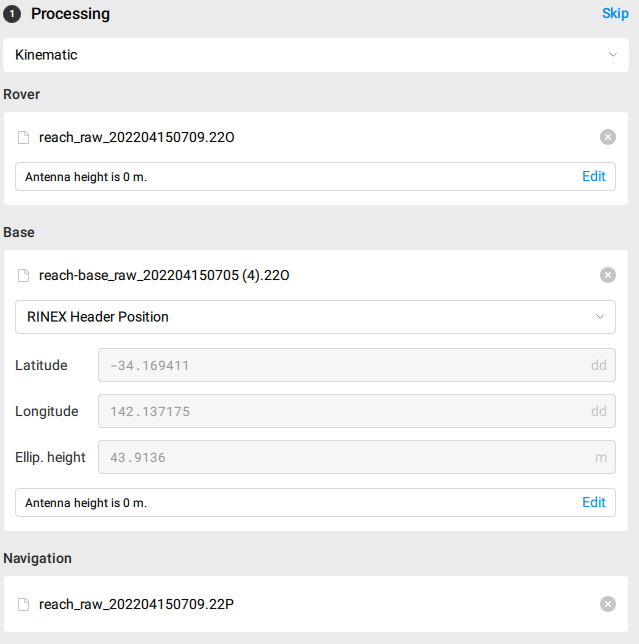
Before I do, given the time and effort involved, can someone tell me if my setting are OK to give good results (my base is an RS2 and I’m in Australia)? Here are my settings on the M+:
Are these OK? While the experts are reviewing these, can they give a little more information than is nessecary. I’ve read a few posts now about noise, and they’ve been great, but I’d like to finish this post with a final answer to my problem and a summary of how best to go about solving it for future searches rather than them scroll through 100 posts and give up and ask the question again.
I have been advised that the M+ is much more prone to noise than the M2, I have one of those on order now, I’ll still do this trail, I just need someone to tell me if the settings are good? @wizprod
Max acceleration is your estimate on how the rover will move. Say, you plan on just walking with your rover and you set Max acceleration to a relatively low value. This information will allow the positioning engine to filter serious fluctuations in solution as errors, resulting in a better overall experience.
So far I’ve discovered that with the Mettatech kit, you need the drone to be on to get the kit to fire up. The kit will stay on when you turn the drone off, but only for about 15minutes.
Didn’t get one with drone in the air, I was watching it. Didn’t fly for full 20minutes either, hover it 1m above the position it was sitting at.
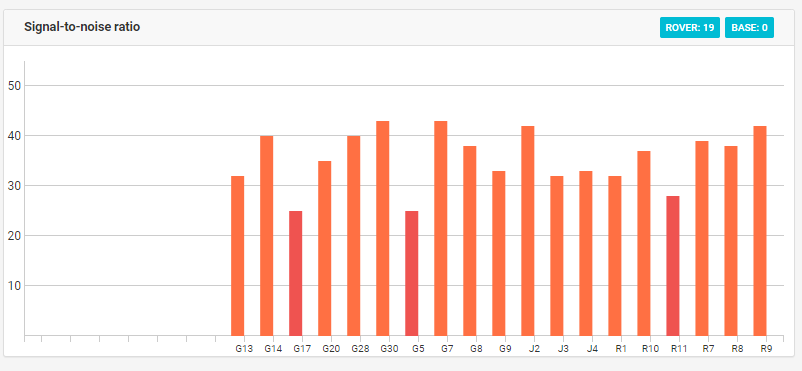
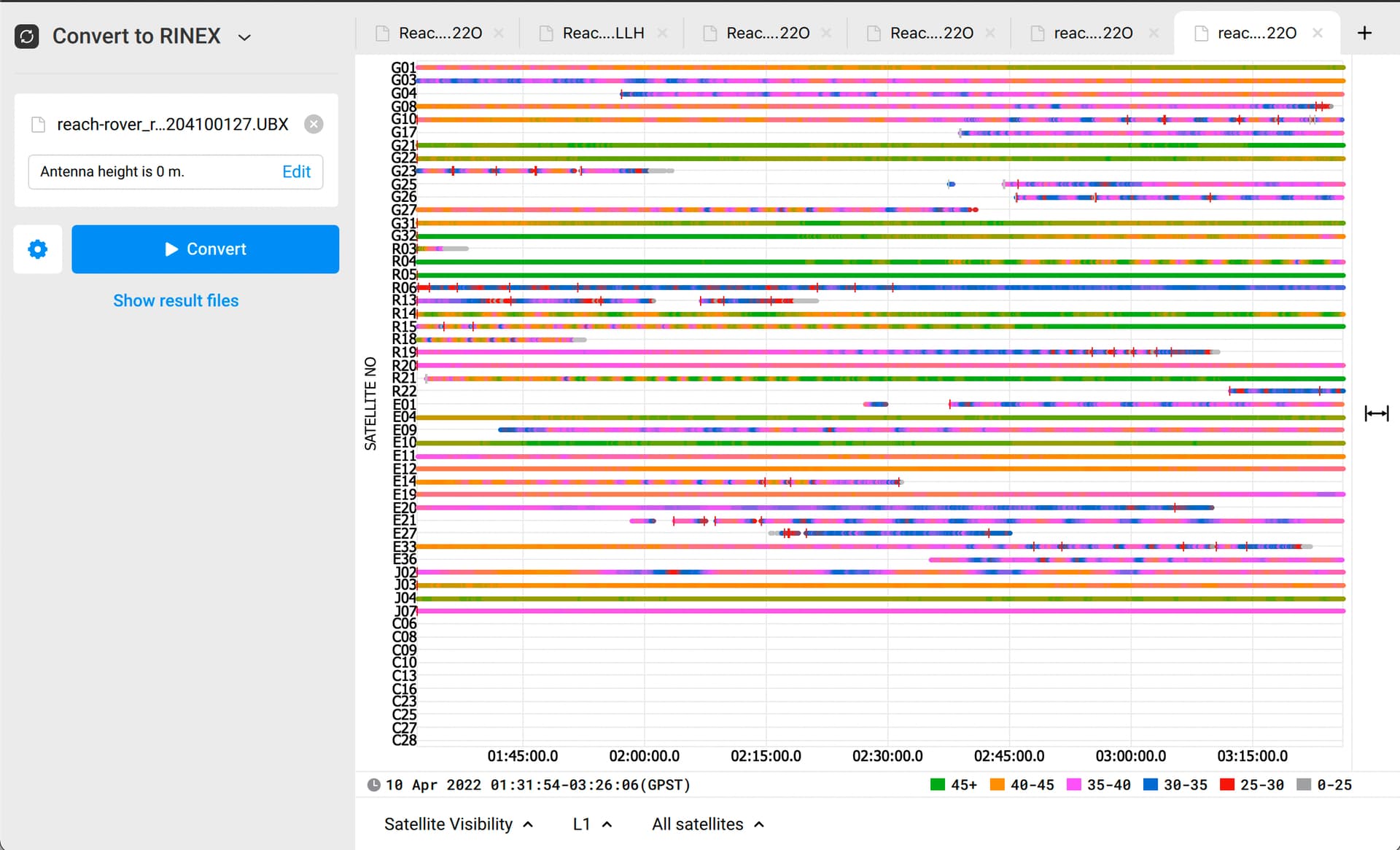
Can the gurus tell me what my RINEX data says? Also it might be worth tell me how to diagnose it myself. I have ordered a M2 and will repeat the same results in a week with it.
Load in the Rinex file into RTKplot. Each Red vertical line you see in the Sat Vis window is a cycle slip.
RTKplot is a really awesome tool in many regards!
In summary:
the M+ is the poor mans choice for PPK kits. If you have an RS2, get the M2 first.
From my testing, very little made a difference, no drone, with tin foil and there was still noise.
Looking forward to my M2 coming, I will post as follow up then.
I’ve checked the data you’ve shared. Thank you for that!
However, I want to warn you from drawing conclusions in your summary. As I see from the logs, Reach is affected by the strongest interference from the drone or the drone’s electronics.
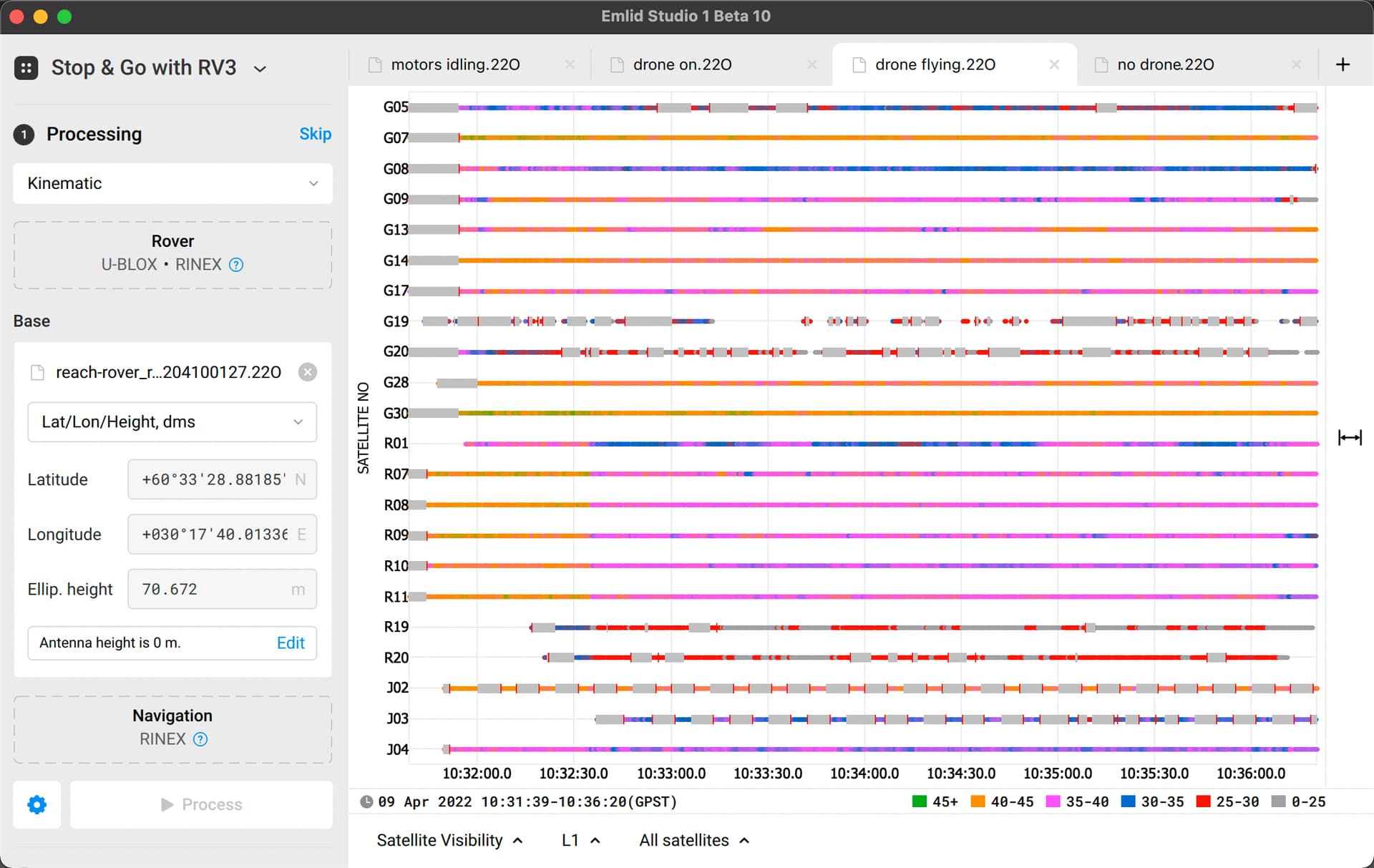
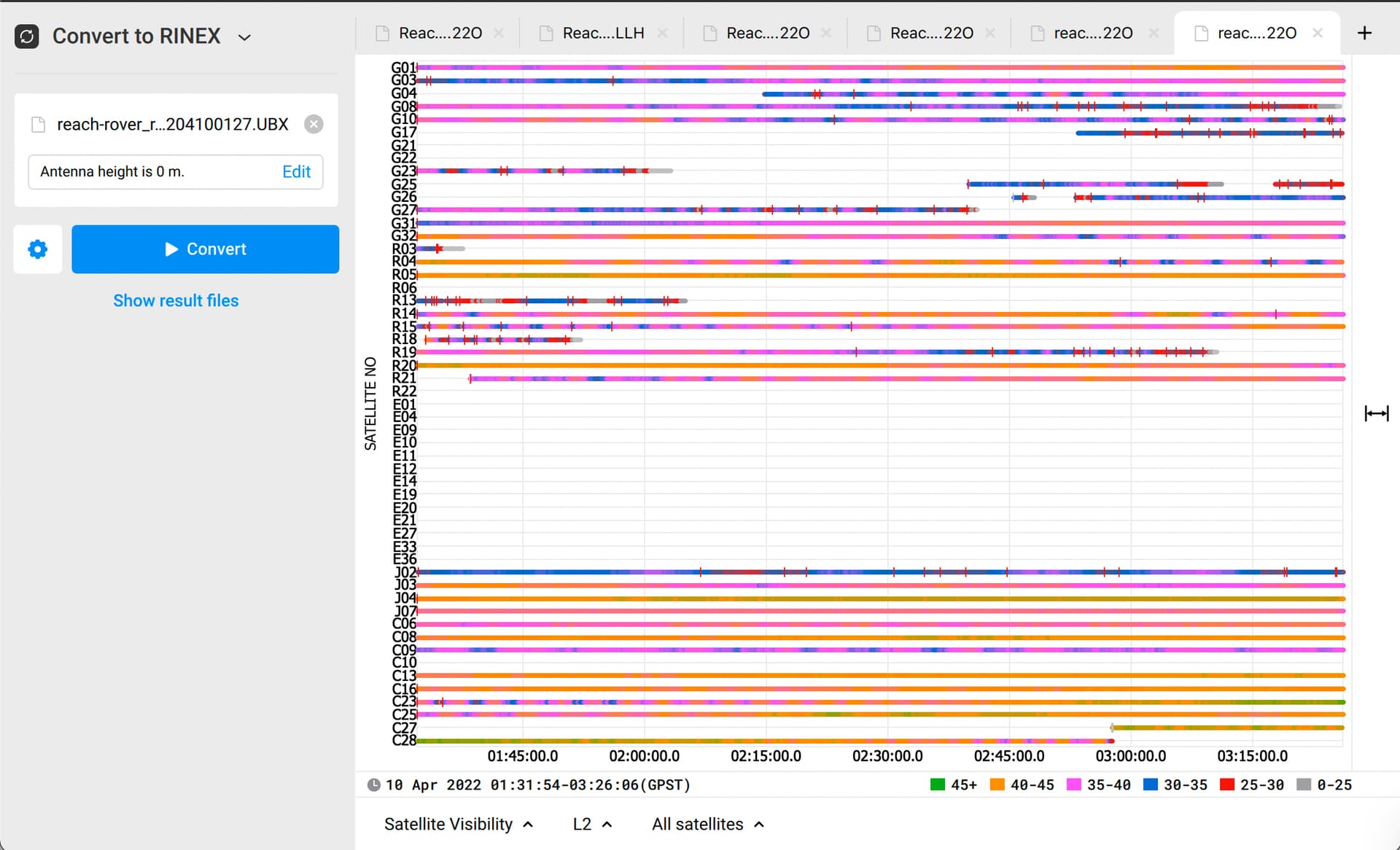
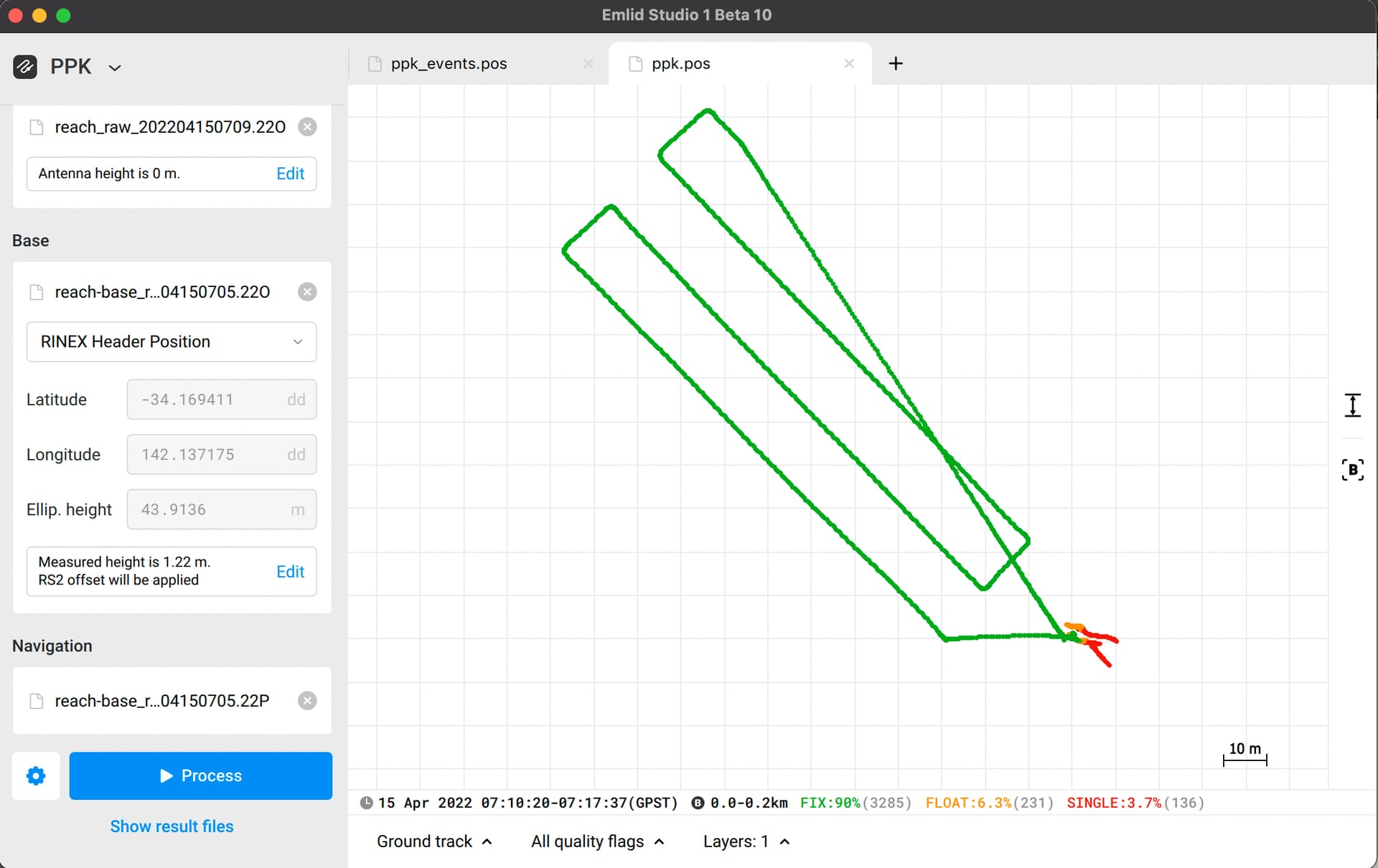
For instance, you can compare these two screenshots. The first one with no drone has cycle slips, but not as much as the second one when the drone’s flying.
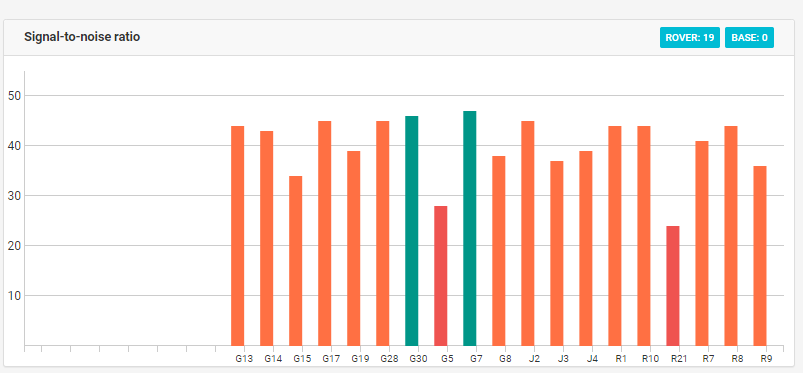
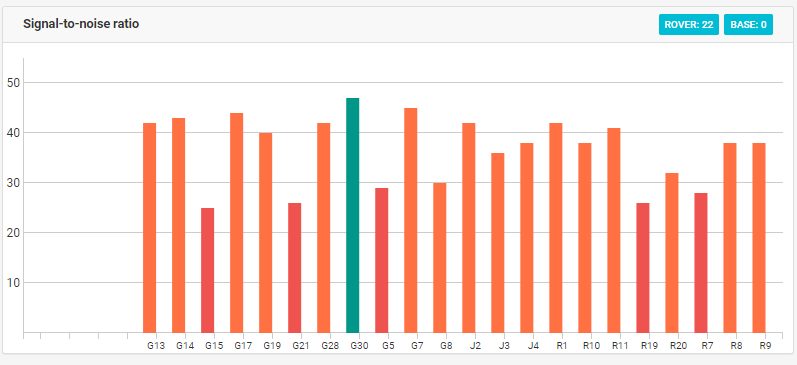
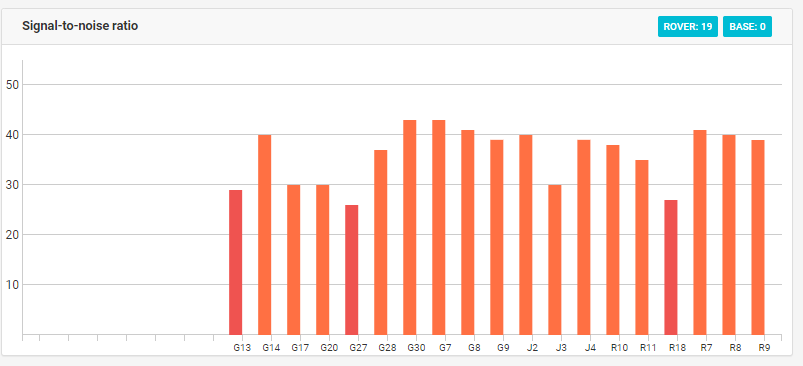
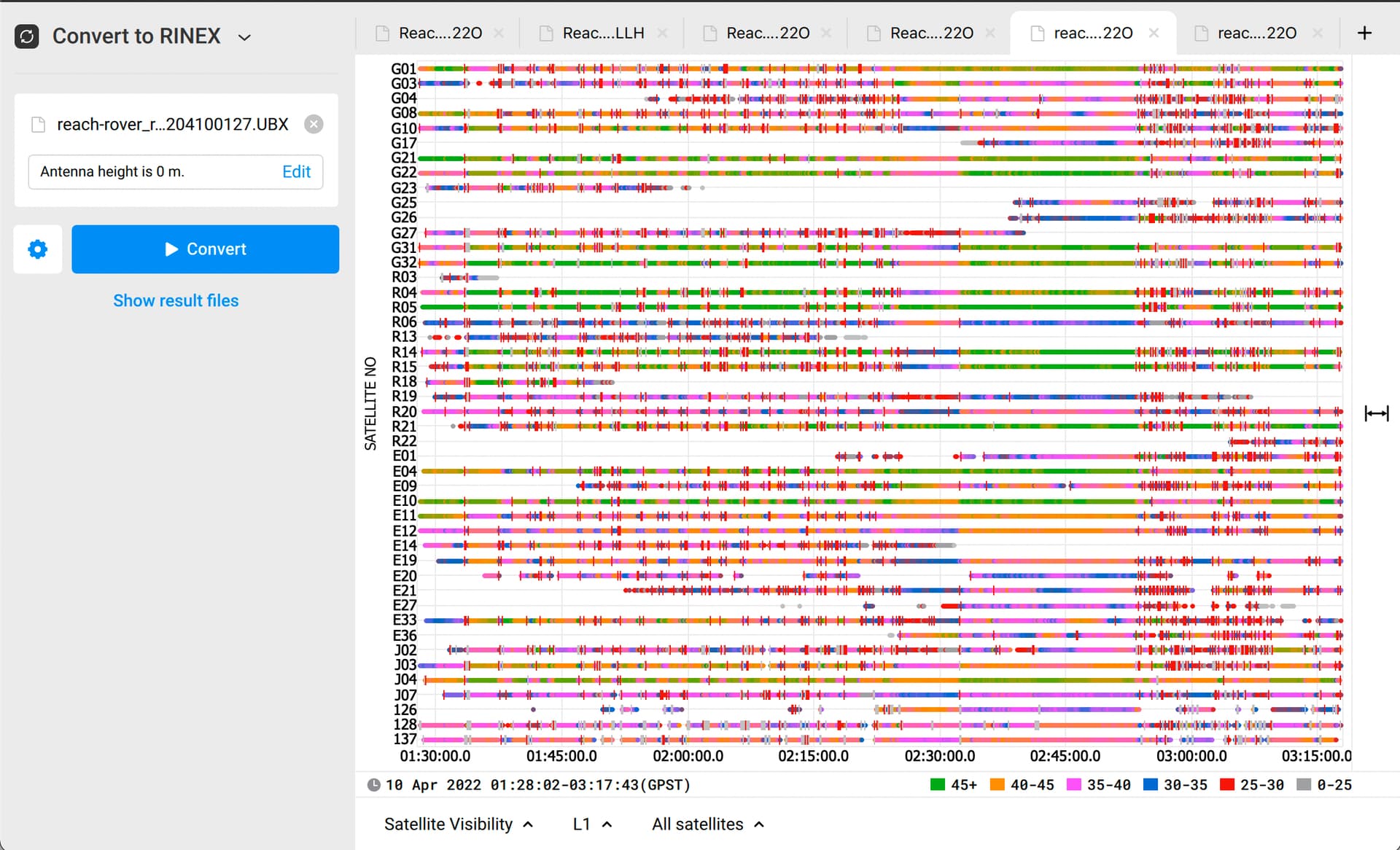
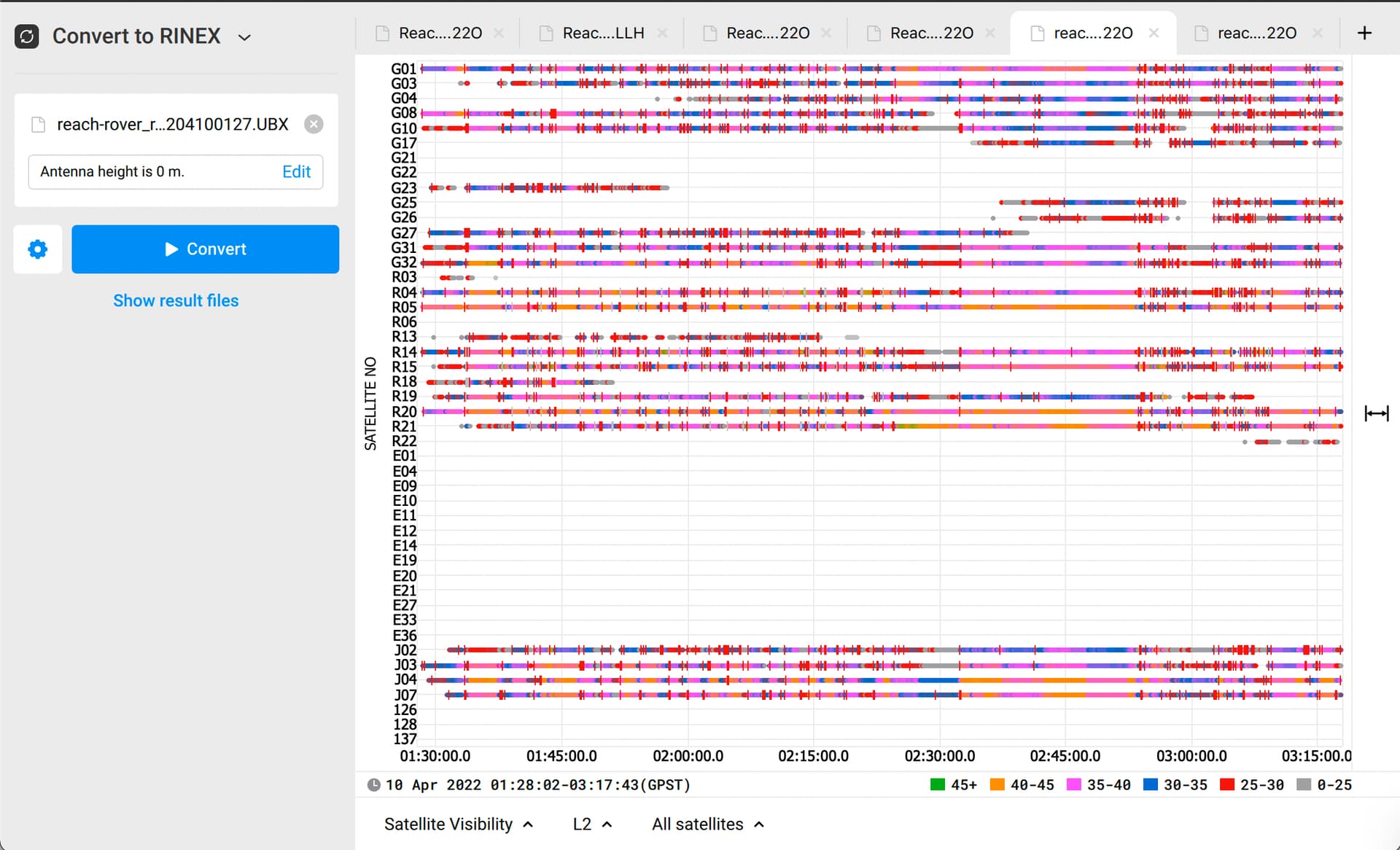
Also, please look at these screenshots from the folder “Why is my data bad”:
The first two are from the rover, and the second two are from the RS2 base. As you can see, the first two are full of red bars while the second two have good quality. It means that the signals were interrupted on the rover. It is one of the impacts of the drone’s electromagnetic interference as well as cycle slips.
So, if you replace single-band M+ with multi-band M2, it’d be twice the number of interrupted signals. I’d recommend you reconsider the hardware setup. For example, to isolate Reach from RF noises of the drone’s electronics.
Great replies guys!!
I’ve recieved my M2 and have done a quick flight.
The base is an average for 10minutes (its only a test flight, nothing important).
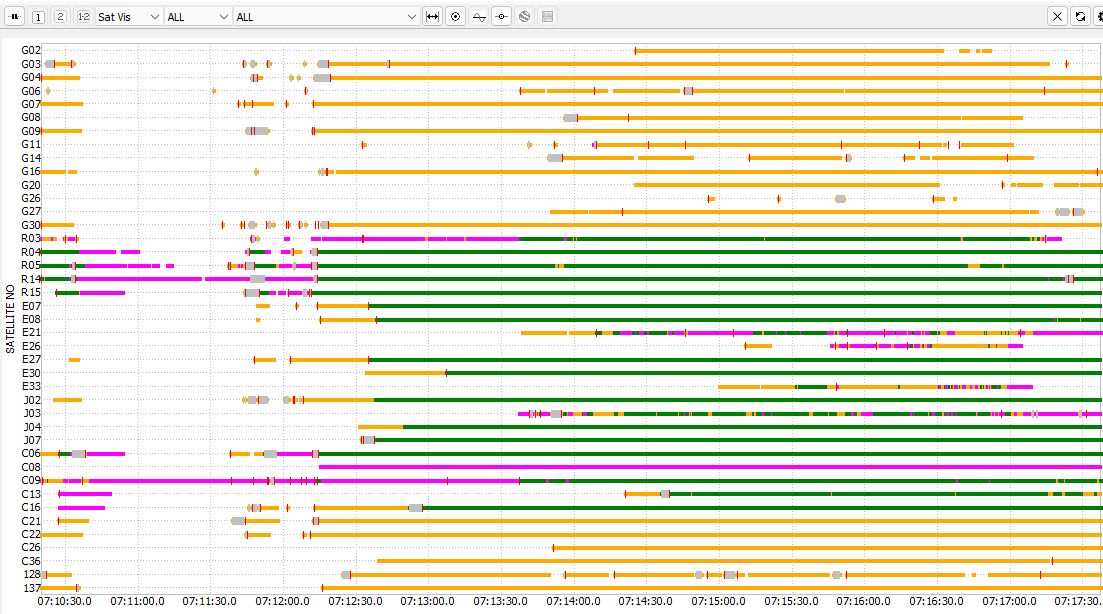
I loaded the .obs file into RTK_Plot.
There appears to be a lot less breaks or noise in the data?
I got 100% float regardless, but I suspect I’ve done something silly.
All GNSS constellations are on, 5Hz data at base, 10Hz are Drone.
I now think my drone is noisy and causing the issue, thank you @kirill.pavlyuchuk I’m not sure where the noise is coming from. I’m not sure DJI would accept EM noise in a warrenty claim either, as it doesn’t affect the drones out of the box function. All I can do now, is try and get work arounds that minimise it and allow me to PPK.
I’ve gotten a new folder: https://1drv.ms/u/s!AutYJ-QZGpnehNMYQ7iTccJ13VZryw?e=1ZjRlX
Would the pros mind having a look and tell me why I’m floating 100%?
My continued appreciation,
Joe
Thank you for your patience! I’m getting back to you with the update regarding your logs from M2.
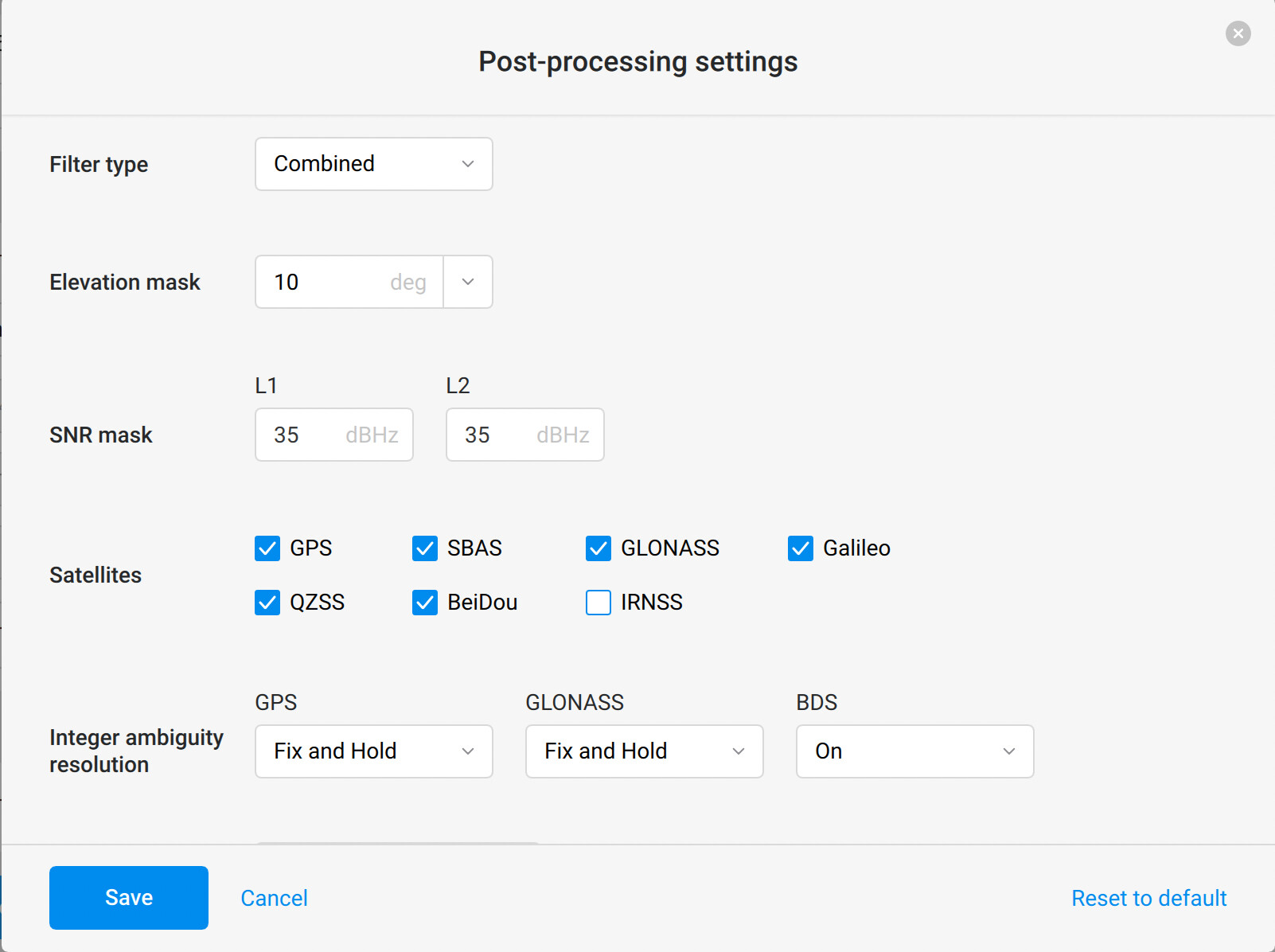
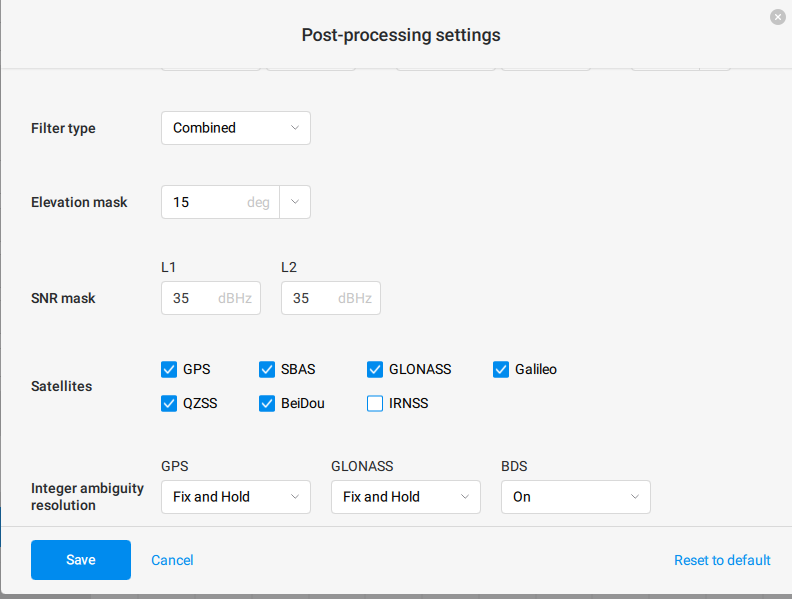
First, I see that the screenshot you provided was made in RTKLib. You can get our free desktop application Emlid Studio for Windows or MacOS.
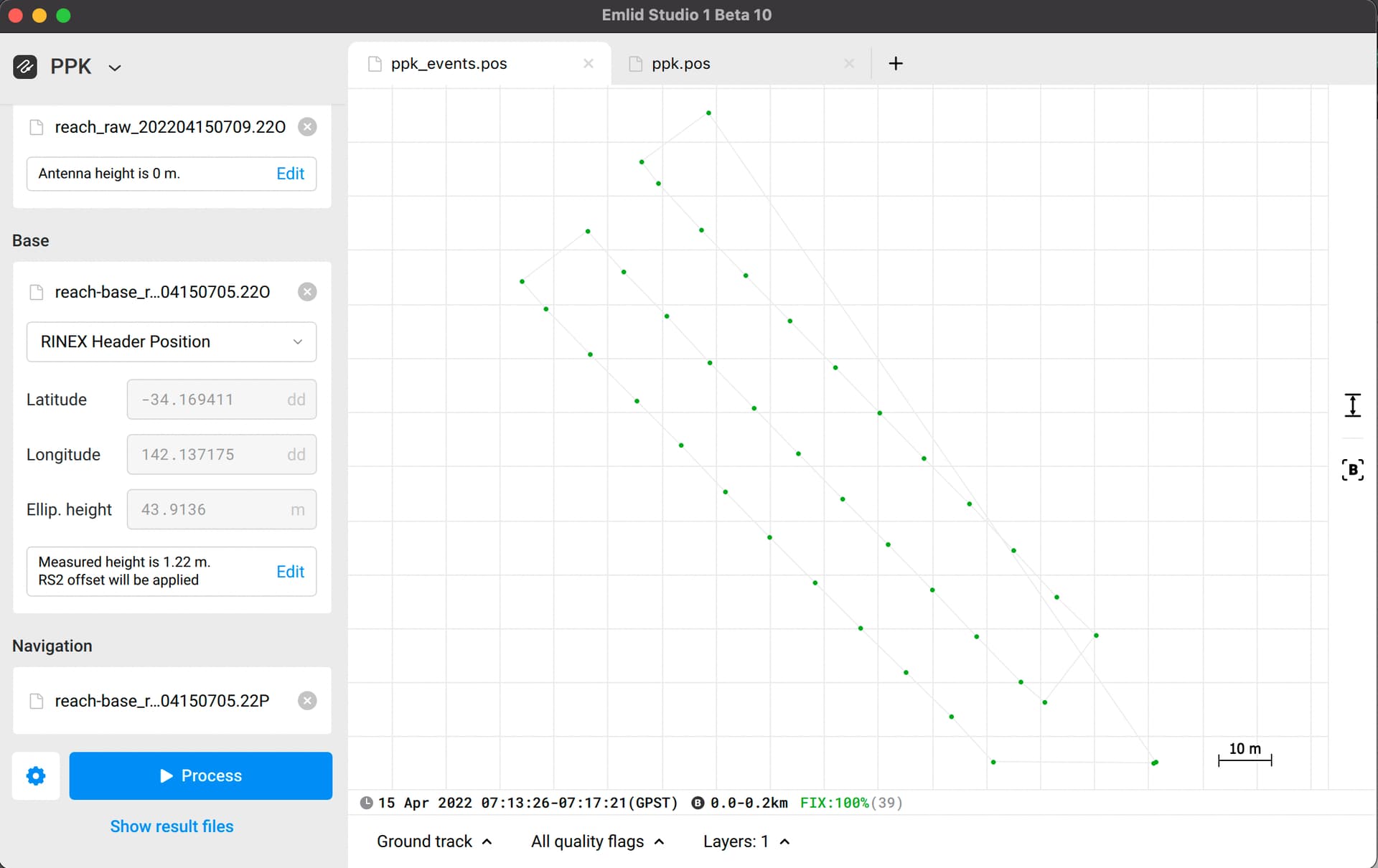
In Emlid Studio, you can change the setting Integer ambiguity resolution of GLONASS to Fix and Hold instead of On. It’ll help you to obtain a 100% Fix result in the events file. I attached screenshots with the settings of Emlid Studio and the obtained .pos files.
I got it working on my end! I’ll have to do some research on the ambiguity setting.
I found another snag that could trip people up:
when deleting lines in the .events log, ensure the last line finishes on an [Enter] otherwise it wont read the line and you’ll be a photo short.
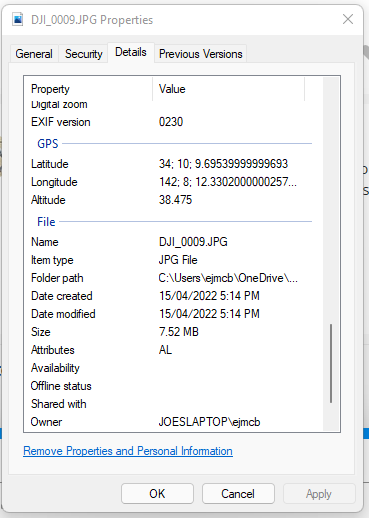
Finally, when I went to enter the newly tagged files into Dronedeploy, it wouldn’t accept them, the geotagged information was bad. I think it might have something to do with my heights, which I know were off. I need to do more work on my drone antenna height and base heights. The one with 38.475 is unmodified and was accepted. Is this an easy fix or just working out heights for base (I averaged my base for 10minutes, so I wouldnt think it would be out by 60m in the vertical?)
I geotagged your photos with the .pos file I sent you in the previous post. I managed to geotag them in Emlid Studio with the toggle Update original photos.
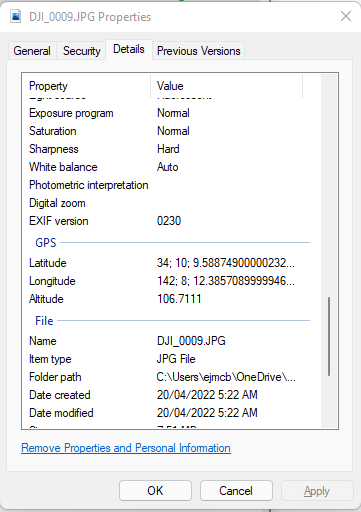
As you took for the instance DJI_0009.jpg, I did the same. I’ve got other coordinates in the EXIF data as shown in the screenshot below. You can check the altitude, it differs from yours.
It seems that you take photos’ coordinates from the initial post-processing with FLOAT solutions. I’ve prepared a link with the geotagged photos and shared it with you. Try to import them into DroneDeploy.
I will have to contact Dronedeploy and have a chat. I’ll keep you posted.
What worries me is that you got a different result to mine - I reran my results and I got ~106m. I suggest I am using different settings?
here are my settings:
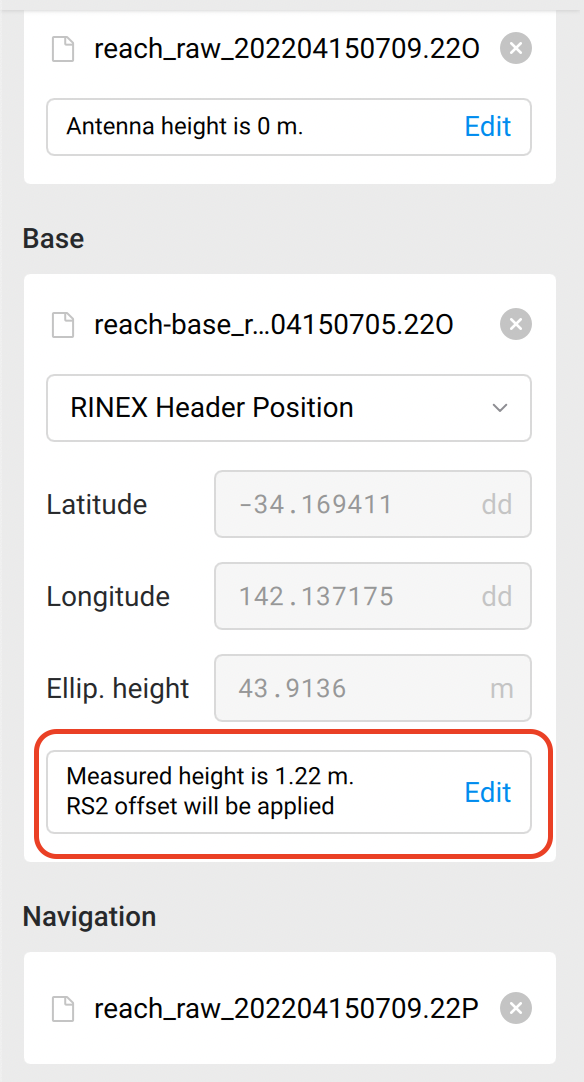
I see from your settings that your base antenna height is 0 m. However, I took it from the RINEX header and it is 1.22 m. Most likely, that is the reason for the difference.