I received three Reach RS modules about two weeks ago and I’ve been spending quite some time testing them. Right now I have one of these modules set up as a base and installed on a roof of a 10m tall building (great visibility, usually 24-27 satellites visible with SNR well above 40). This base module is set to broadcast correction output messages with LoRa at 865MHz. Two other modules are on the ground and they are set as rovers listening to correction messages with LoRa at 865MHz.
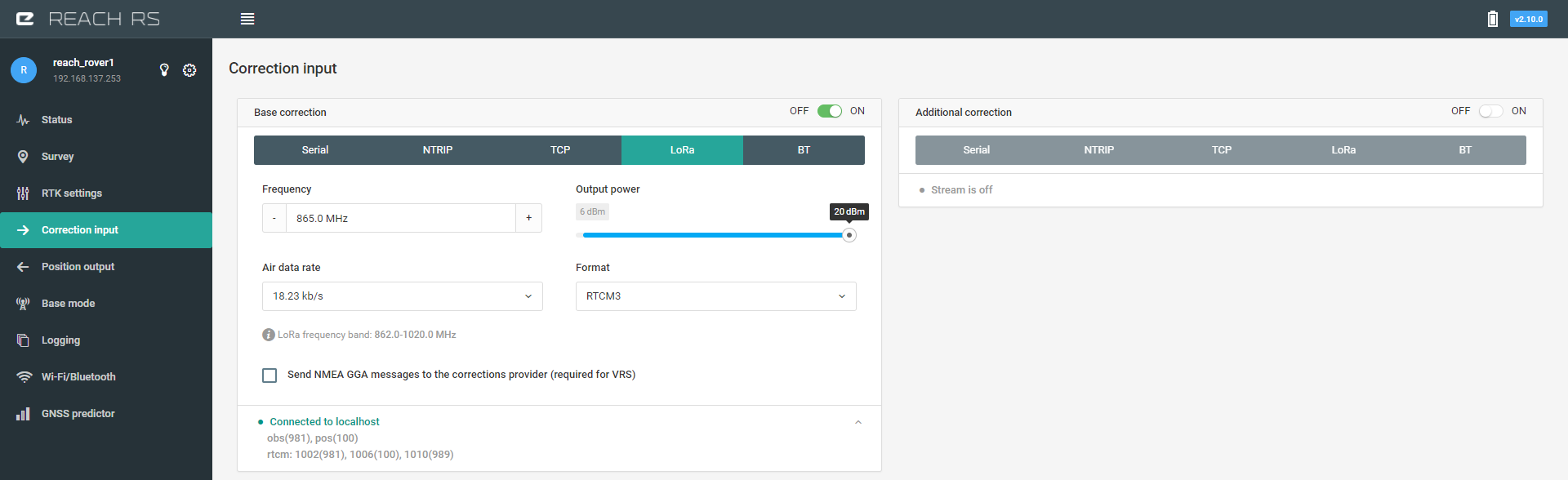
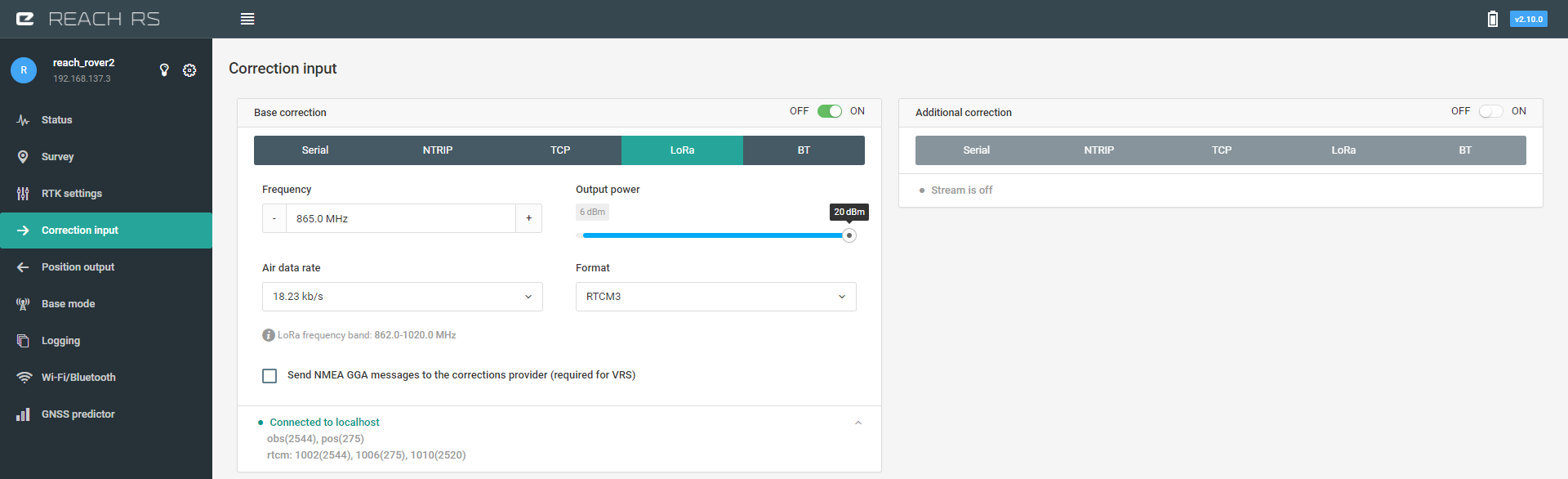
The problem is that only one of the rover modules is able to reach float and fixed modes and display the grey base bars in status window. The other rover never displays the grey base bars in status window and never reaches float nor fixed mode (stays in single mode). In “Correction input” window both modules have the text “Connected to localhost” and similar information about the messages received.
I have tried to move the modules to better location, swapping the roles of the modules, sending the correction data with different frequencies, trying TCP connection and re-flashing the modules. The conclusion is that no matter what I do, only this one specific module out of the three I have is able to display the grey base bars in “Status” window and reach float and fixed modes.
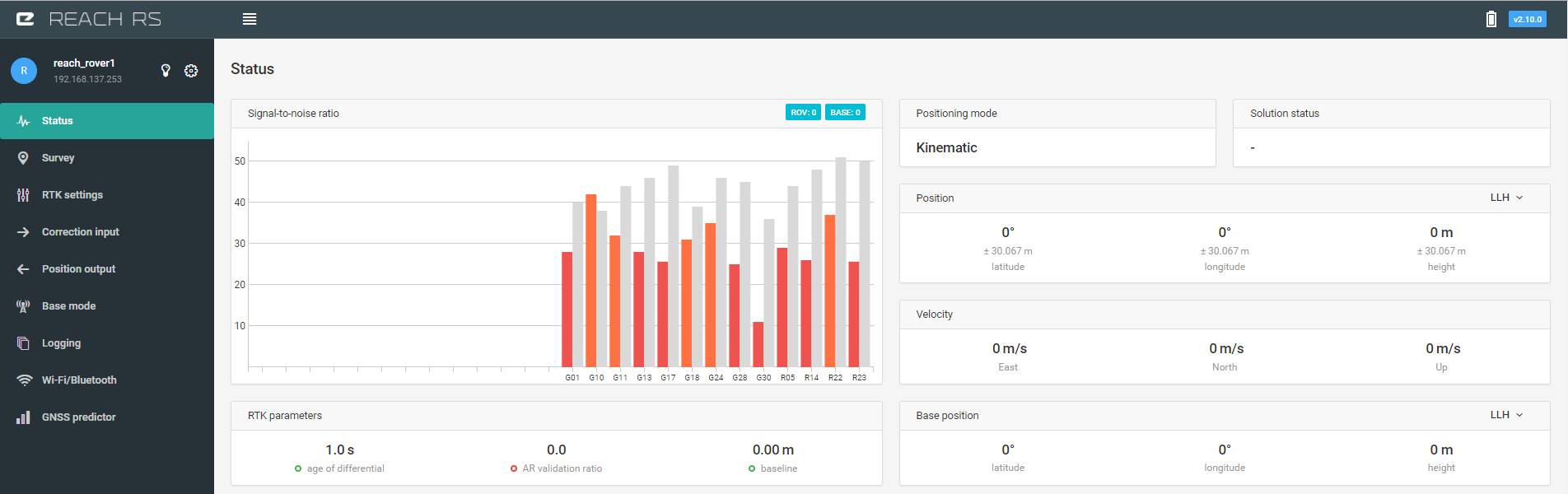
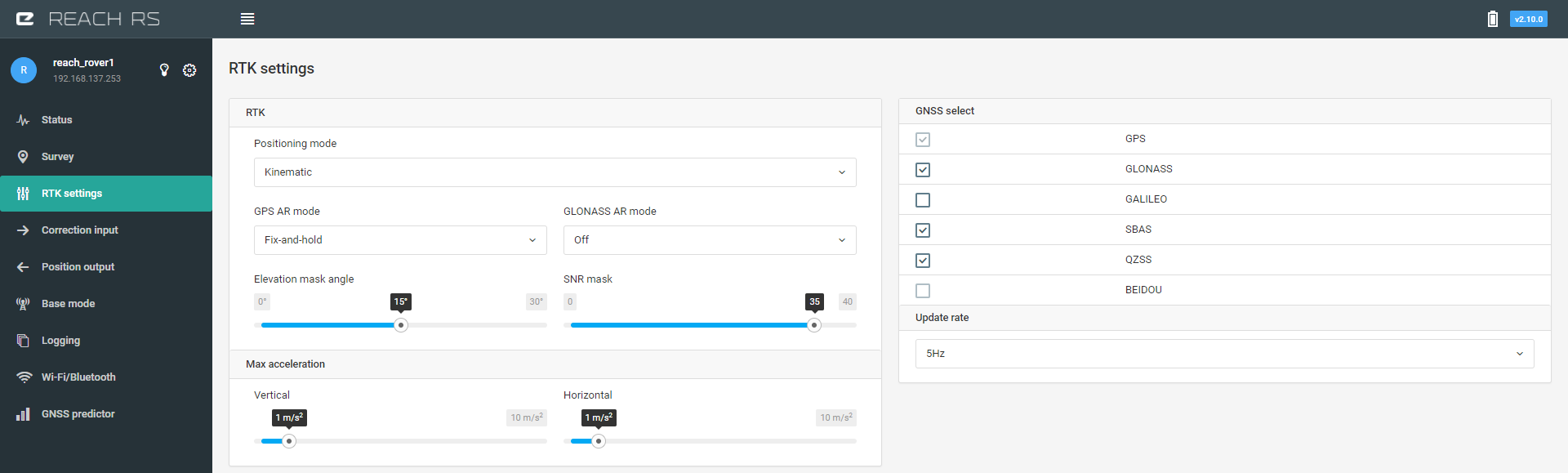
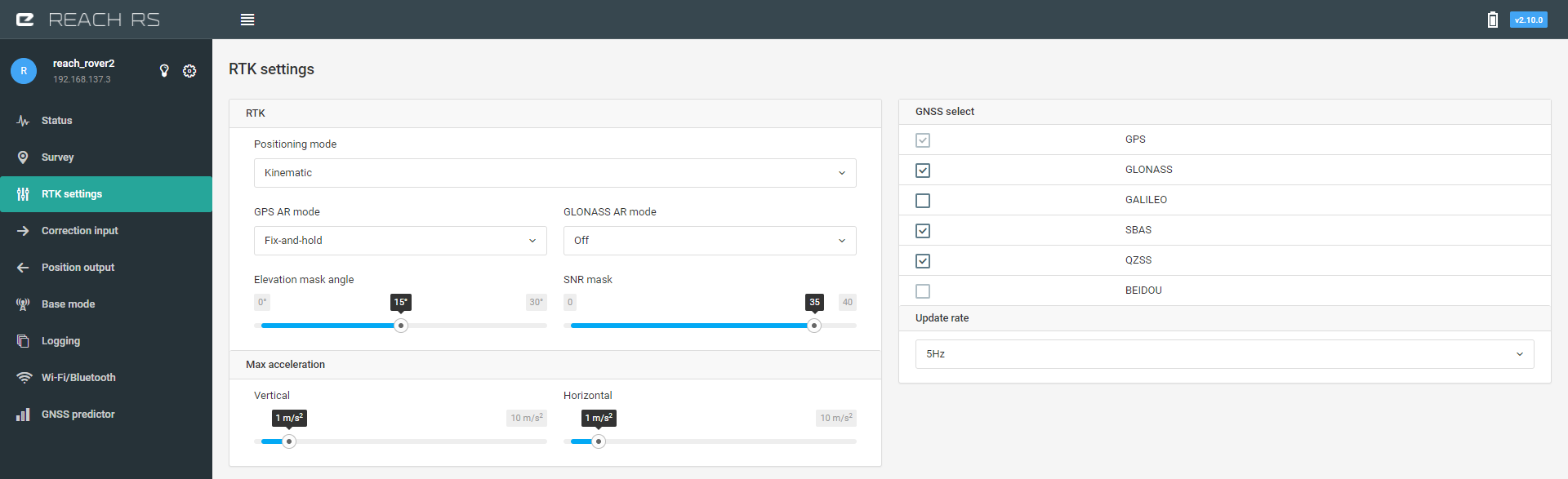
Does anyone have any suggestions how to fix this? Below you can find screen captures of the browser version of the ReachView app. These pictures show “Status”, “Correction input” and “RTK settings” windows for both modules. Module named “reach_rover1” functions properly and “reach_rover2” has the described problem. I desperately need two rover modules for my project.
Best Regards
Simo
In pictures about status windows you’ll notice that the modules’ own satellite reception is awful. This is because screenshots were taken while both modules were inside a building (it is currently snowing heavily outside and I didn’t want to take mo computer out). Despite of this it can be seen that the other rover (reach_rover1) has the grey base bars in its status window and the other rover (reach_rover2) does not.
That is really odd because if sending corrections by TCP also failed, then it points to software, not hardware. And you said that you reflashed, so that makes it even more odd and makes me think that it should be fixable, perhaps by resetting to factory defaults (in the gear menu).
It would also be good do something like number them 1, 2, 3. Then, one at a time, make each unit a base while recording which of the other units receive the base corrections and which don’t (either by Wi-Fi/TCP or by LoRa).
Then you will have a table of works/doesn’t work of base/rover roles like this:
base -> rover
1 -> 2
1 -> 3
2 -> 1
2 -> 3
3 -> 1
3 -> 2
After that, it will be easy to pinpoint the trouble spot.
Already did the numbering (labeled the modules with stickers that came with the modules). As I described in my original post, only one specific module can reach Fixed and Float state and display the grey base bars. Two other modules cannot do these things but they can act as a base.
I’ll continue tomorrow with the second re-flashing for the problematic modules. If that doesn’t work, I don’t know what will.
This further means the base function of unit#1 is probably fine, and that most likely the problem is with the correction input function of units #2 and #3. Since those are both software issues, then a re-flash should fix it. If not then it points to: communication trouble or finger trouble.
Why don’t you get a setup started where it doesn’t work, and then log raw data on the base, and raw data, base corrections, and position on the rover. Upload those files and we’ll give you some insight.
Just re-flashed the troublesome modules the second time and now they are working like a charm! I don’t know, did I do something wrong when re-flashing the modules the first time, but now the modules work as they should. Grey base bars visible, float and fixed modes reached! Thank you Bide for all your input with this!
So if anyone is experiencing the same weird bug, try re-flashing the module (and if that didn’t help, re-flash the module again). Here is the link for re-flashing instructions: Firmware reflashing | Reach RS2/RS2+