



Hello,
Some changes since 2017:
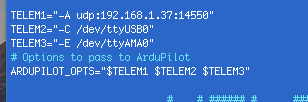
/etc/default/arducopter is now like this:
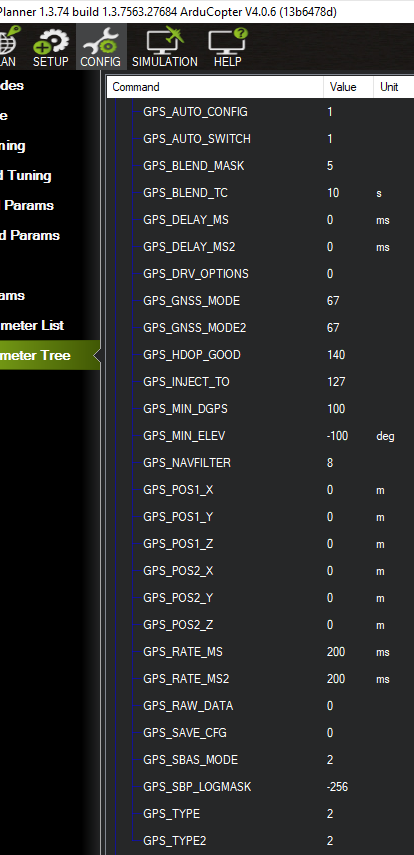
Before plugging GPS to UART Navio2 port, I checked configuration with UBlox utility and adjusted UART serial speed at 57600 and other parameters according to my need (I do not use GPS_SAVE_CONFIG option). I use the same method for the Navio2 GPS (ublox utility).
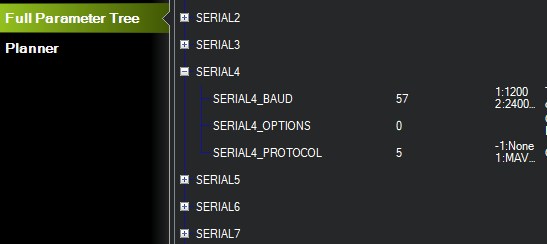
Serial 4 is set at 57600 (same as M8N UART speed) and protocol at 5 (GPS)
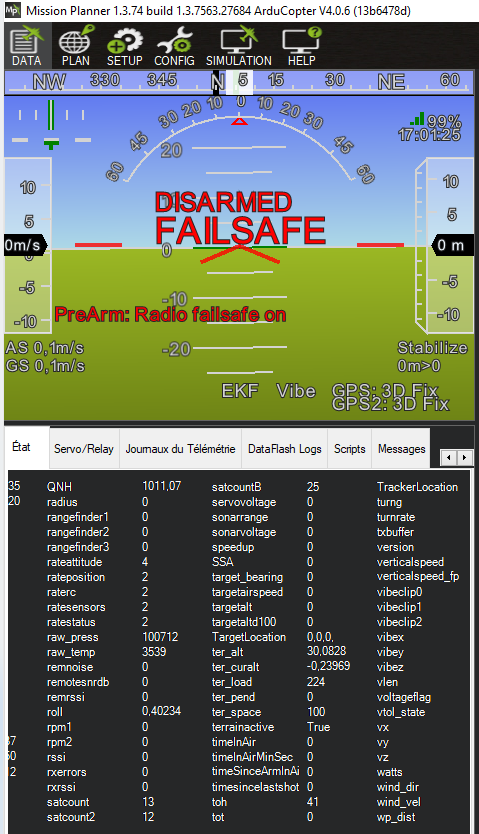
After reboot, GPS2 is identified and data displayed

Satcount for GPS 1 AND 2 can be checked in status window
What can be wrong:
UART serial speed of GPS different from Serial 4 speed,
Inversion of RX and TX line on the GPS unit