Thank you for the response @coby,
For both Reach units I have made my own Ground Planes
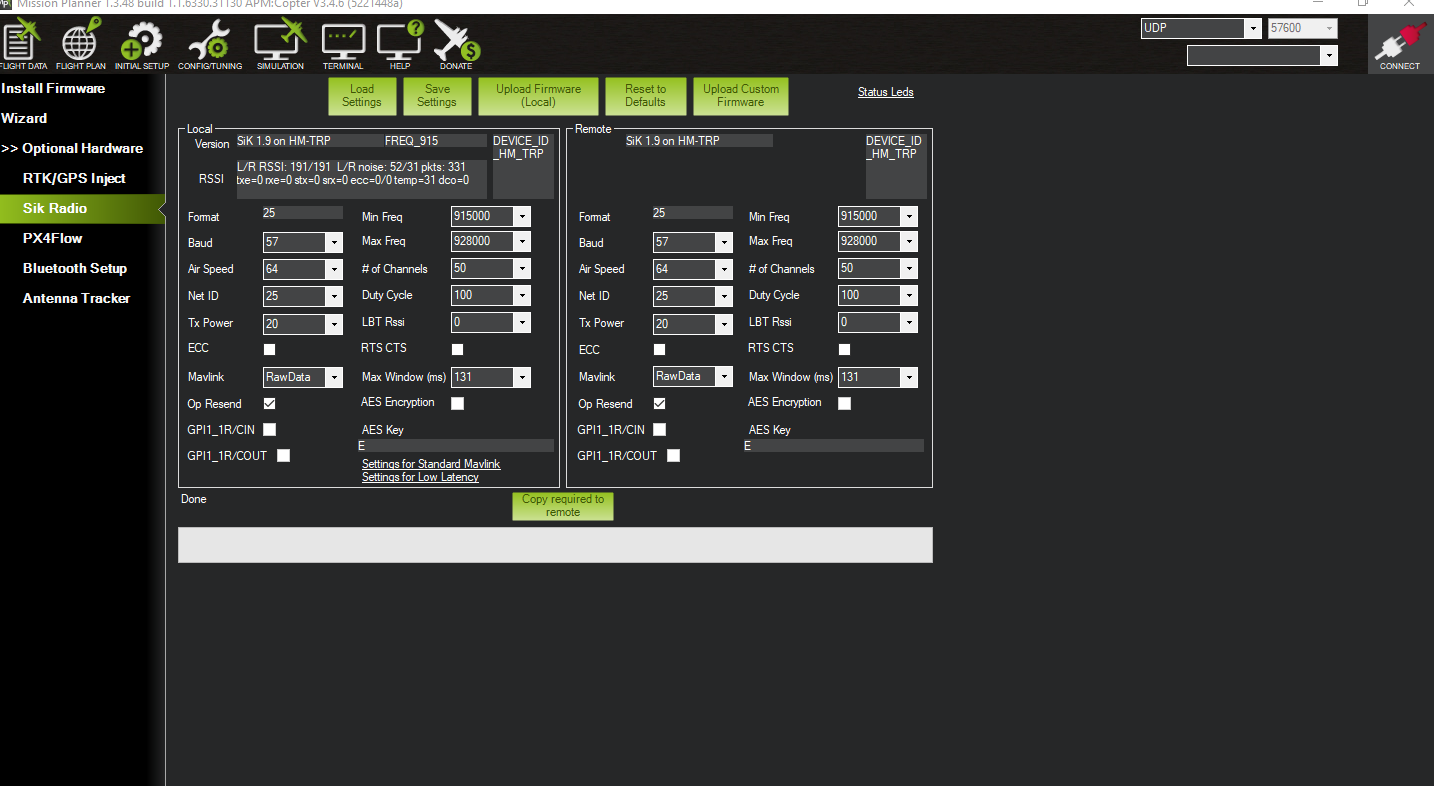
I’m taking this in steps, as a Land Surveyor, My first goal was successful GPS fix between Base station and Rover using two reach units. SUCCESS. communication link was two 3DR Radios. accuracy was within 2 centimeters.
Next goal, Base station at my office over a known point sending corrections out over the internet to my Rover (Again, using two reach units, again SUCCESS!)
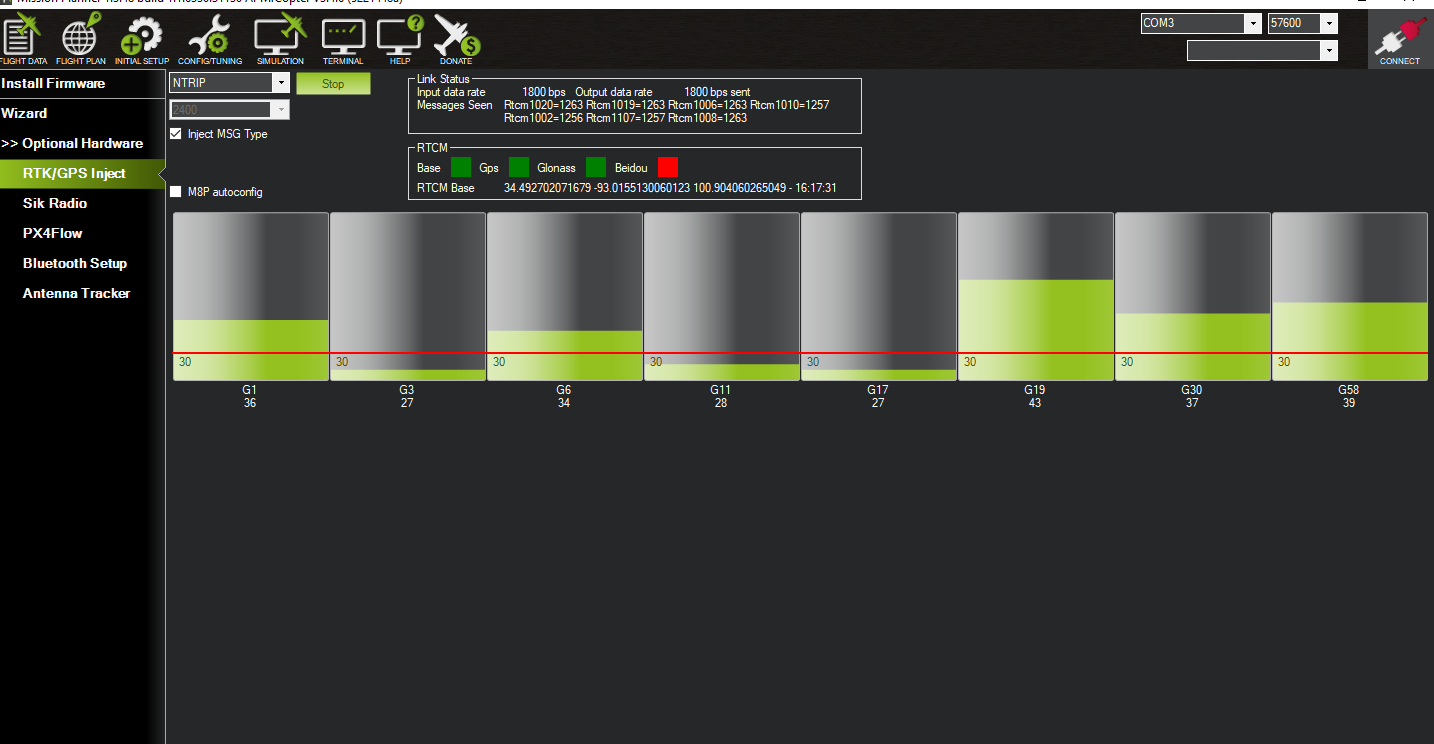
Comunication Flow: NTRIP - Reach as Rover>WiFi>internet>My LAN>Snip>Reach as base
Base, using my LAN and was sending connections to my windows 10 Desktop, which was running a free NTRIP Caster called SNIP, which in turn was broadcasting the corrections over the internet.
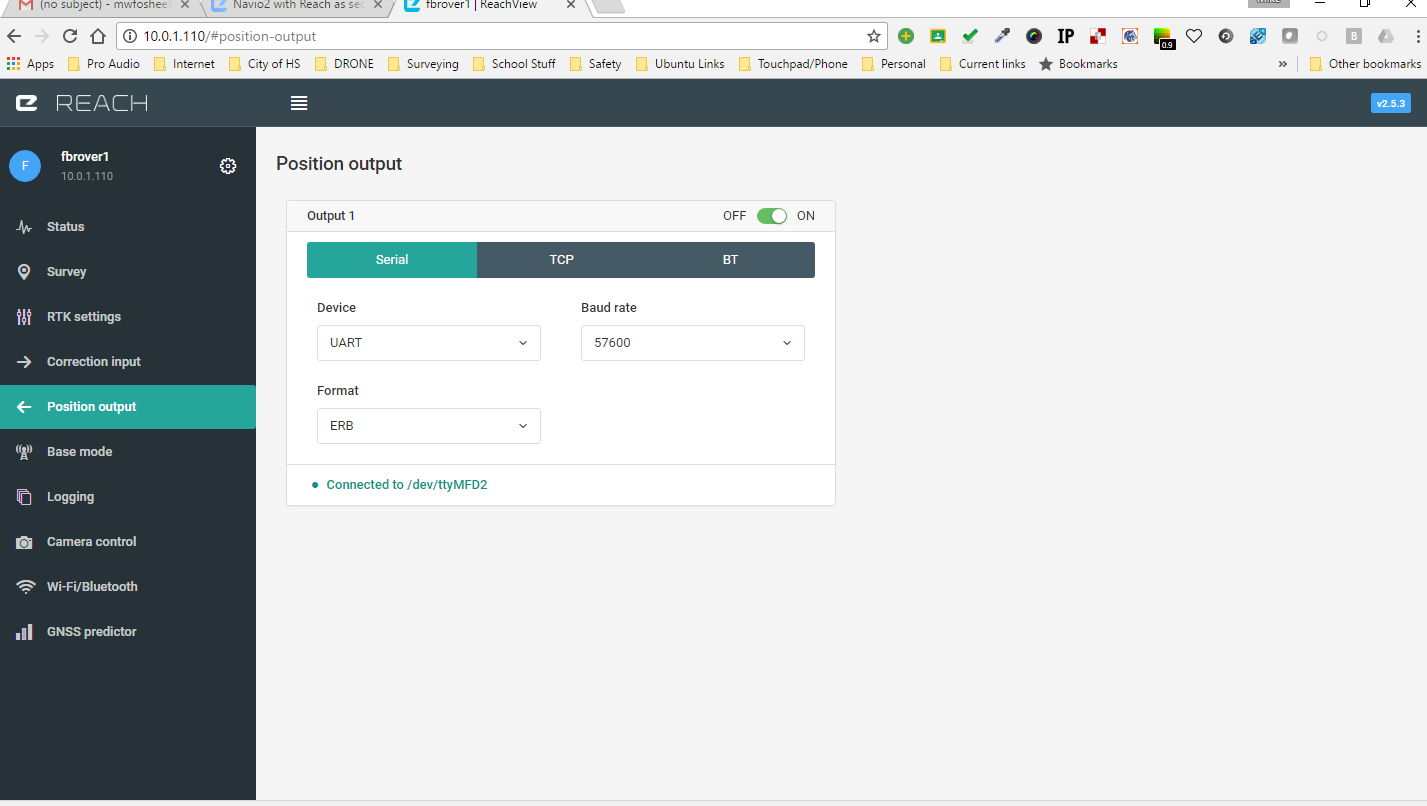
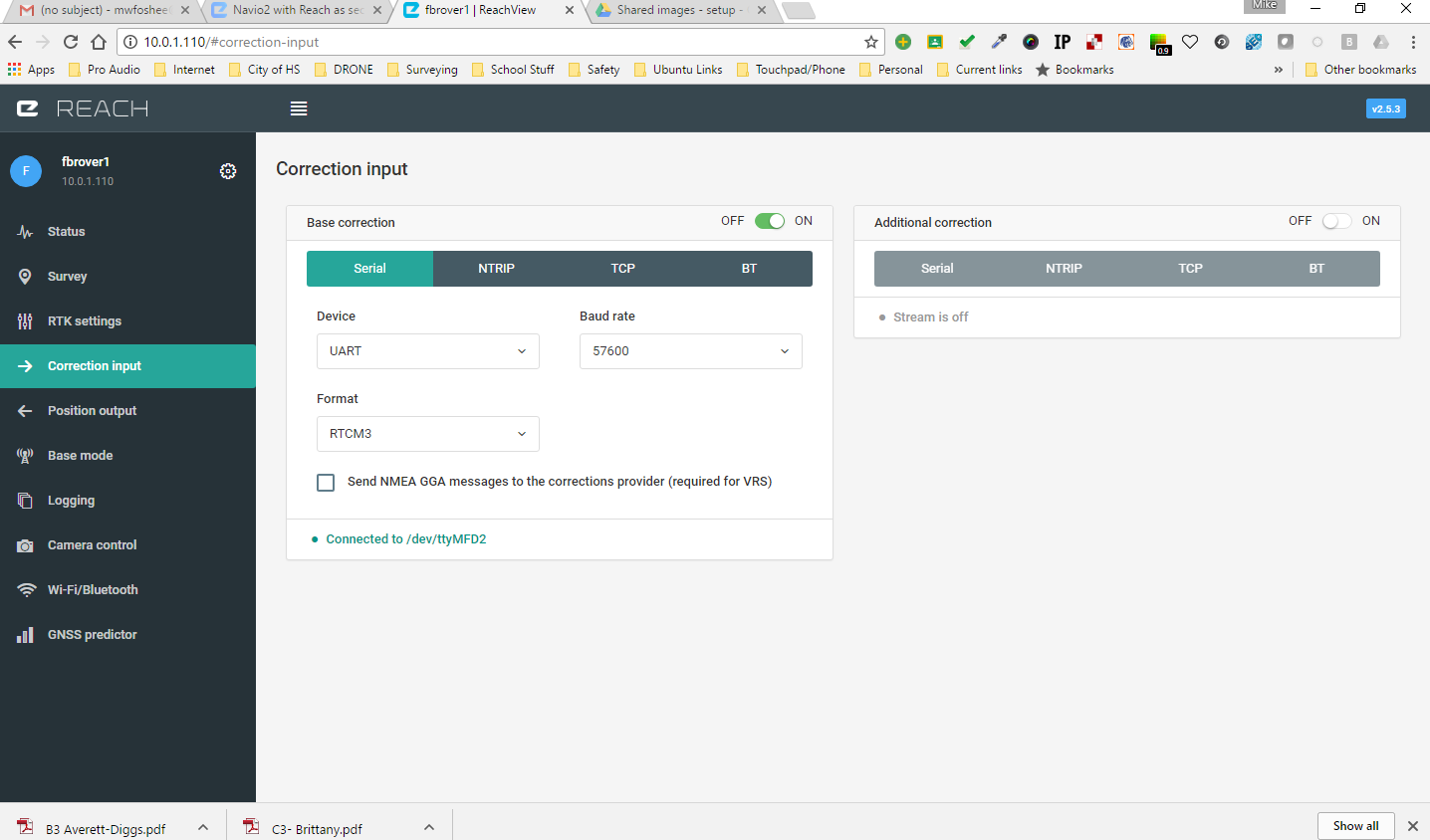
For the Rover, I created a hot spot on my verizon Android Phone to provide access to the internet and NTRIP correction from Base. I was then using an Android Tablet running the App (MapIt), and connected to my reach rover via bluetooth to collect points. I did not check accuracy, but initial indications look to be in the same 2 CM area, providing I’m not more than 10KM from The Base.
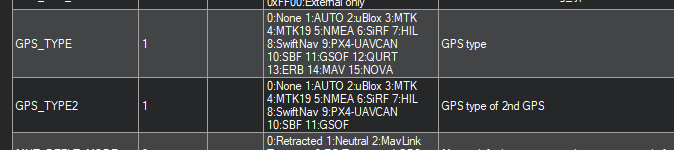
I wish to now add an additional reach unit as 2 GPS to Navio2 and I’m not sure which works best:
Run the rover/base setup just like before using separate radios, then simply add the reach as a secondary source for GPS or
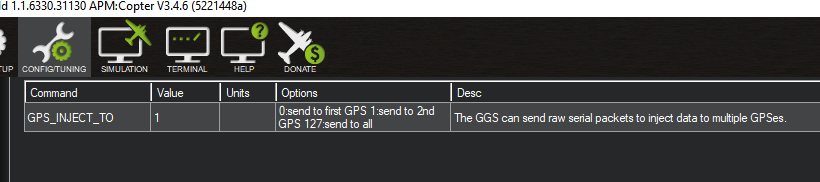
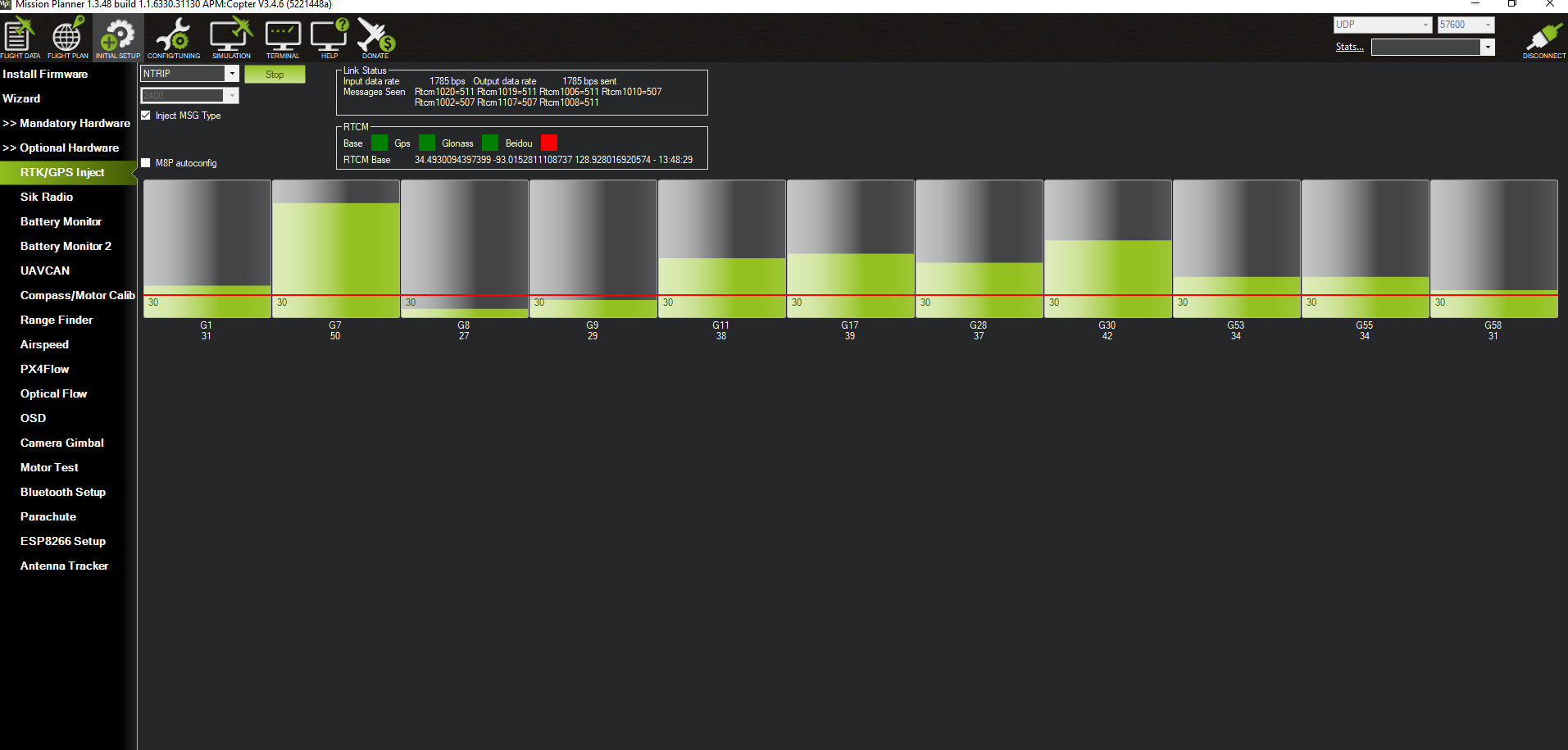
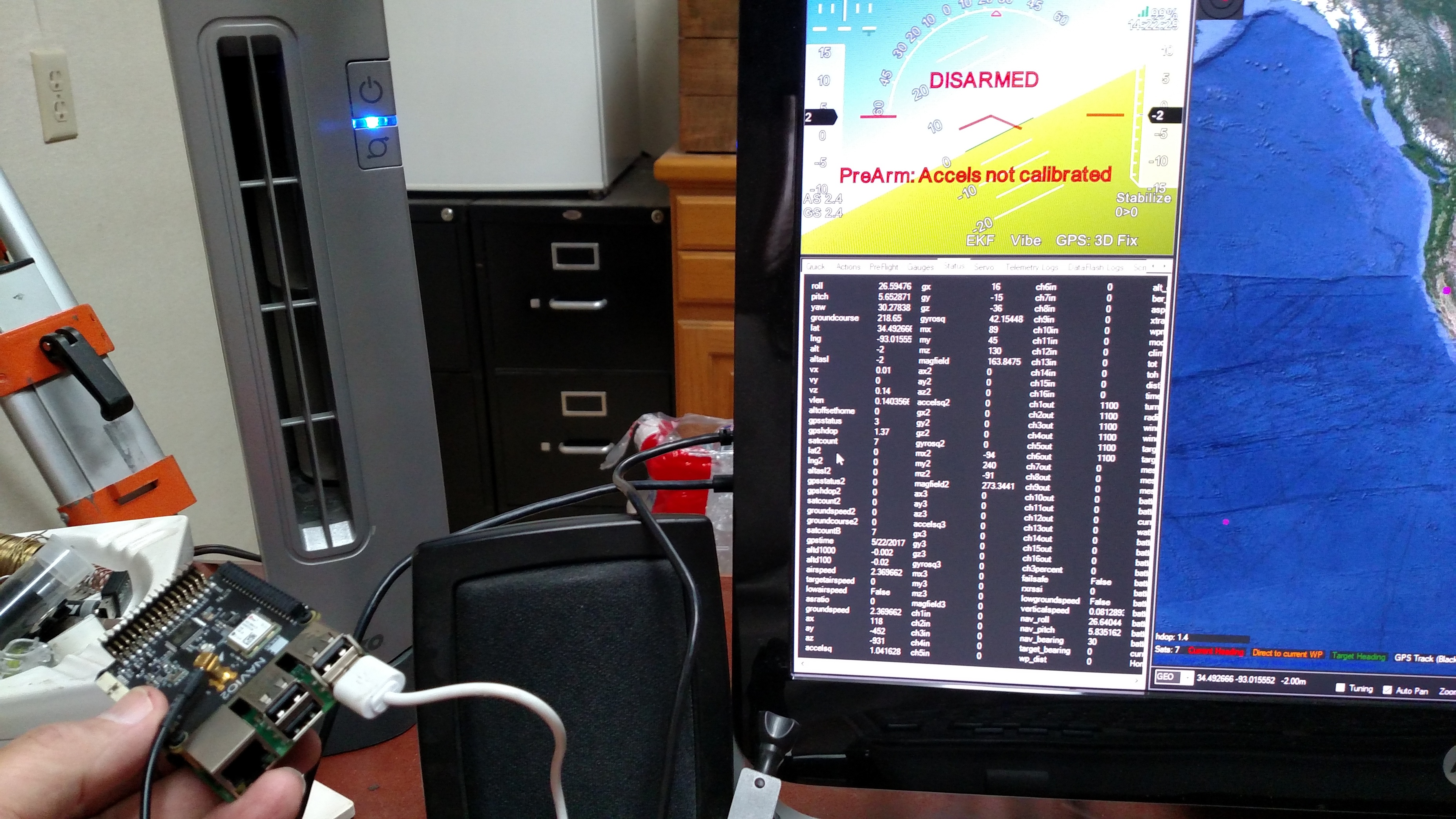
Hook up the radios to Navio2, hook reach up to navio2 and use mission planner to inject correction into reach from base.
I also need to allow for camera and camera gimbal control, FPV 9or at least video from camera), as well as telemetry back to my Radiolink AT10.
I’m not looking for connection to my computer in the field at this point. (I don’t think)
I love the flexibility of the Navio2 and Raspberry Pi, but without a diagram showing “best use practices” for hooking up the peripherals, I’m envious of PixHawk and It’s labeled inputs on the box.
Do you have an overall schematic you would recommend?
What typically in hooked up via l2R and ADC connections?
On the reach unit, there appears to be 2 DF13 connections, are they the same? could they both be used at the same time?
Thanks in advance, in the meantime I will revisit (for what seems like the 100th time) the link you posted.