I actually caught the lower case -c yesterday, but fixing it had no effect.
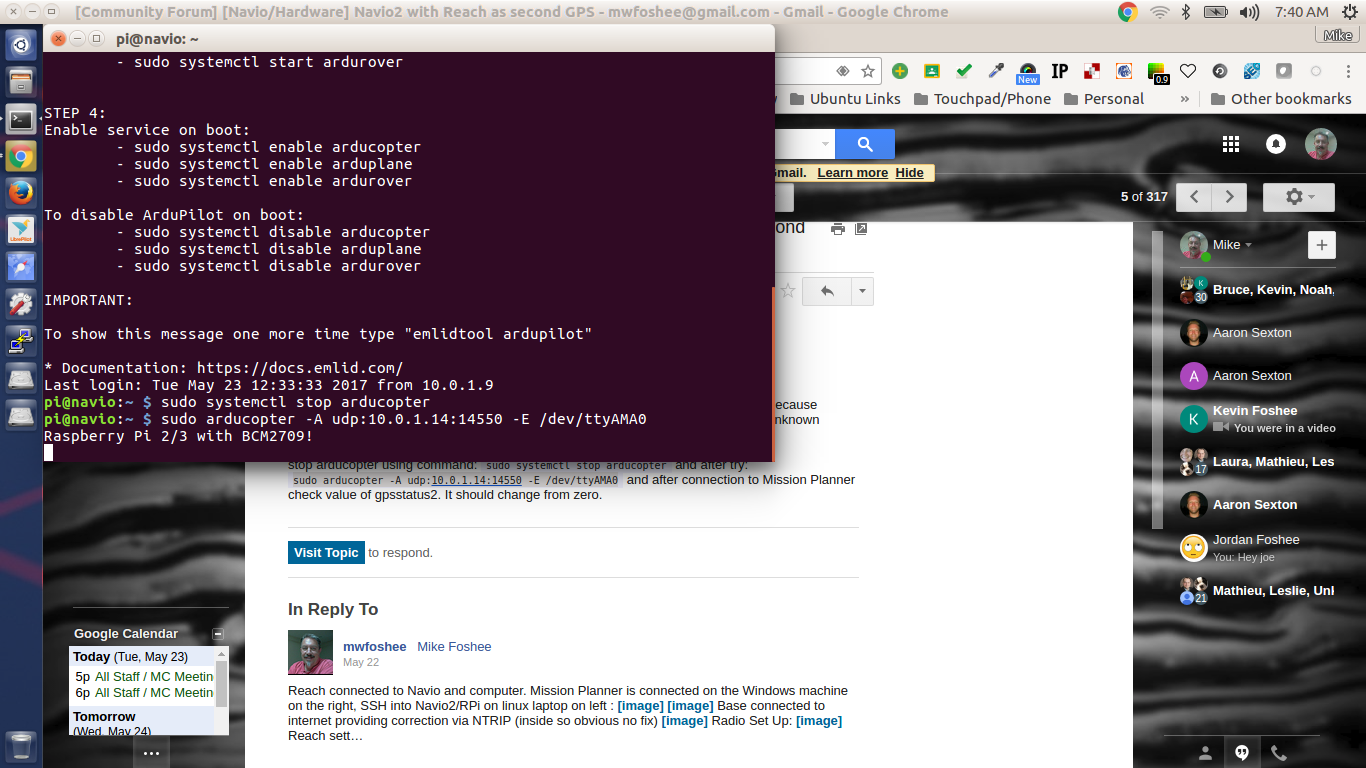
After the sudo arducopter -A udp:10.0.1.14:14550 -E /dev/ttyAMA0 command, I got for the first time the response from Navio2/RPi
Raspberry Pi 2/3 with BCM2709! (as shown on screenshot)
To enable and configure GPS inject options in Mission planner press “ctrl+F” button combination. This will open a window with advanced GCS settings. Click Inject GPS button on the right.
Thank you @igor.vereninov, Mission Planner 1.3.43 is very sluggish and slow, seems “Buggy”. How about updating the Navio2 to arducopter version 3.5? is that something I can do or does that have to be pushed from you guys @emlid ?
23 minutes from “ctrl+F” and still waiting to enter NTRIP caster credentials (I thought the first time took long at 20 minutes so I restarted the computer thinking that would speed up the process the second time. NOT.)
At the moment AC-3.5 has not been labeled stable and hence we won’t update our packages. But it can be easily done by yourself. You can download the binary over here and then launch it as described here. Take into account that you’ll need to select FRAME_CLASS in your params to make it work. I guess it will be done automatically in MP but in case it won’t this is an essential bit of information.
Hey Mike. Glad you got it going in the right direction!
Please note that 3.5+ is also going to introduce a blended GPS mode - both GNSS feeding a 3rd, virtual GNSS. I believe it is on by default if you are running dual GNSS. While this will not impact your raw logs and PPK it is still TBD as to what will happen in RTK mode when using a blended approach. The theory is that the RTK status should hold a much higher weighting so should be the main source in a blended setup. The goal was to reduce the copter from jumping around when switching between GNSS, so it’s the right idea. Just not sure what the result will be in the real world.