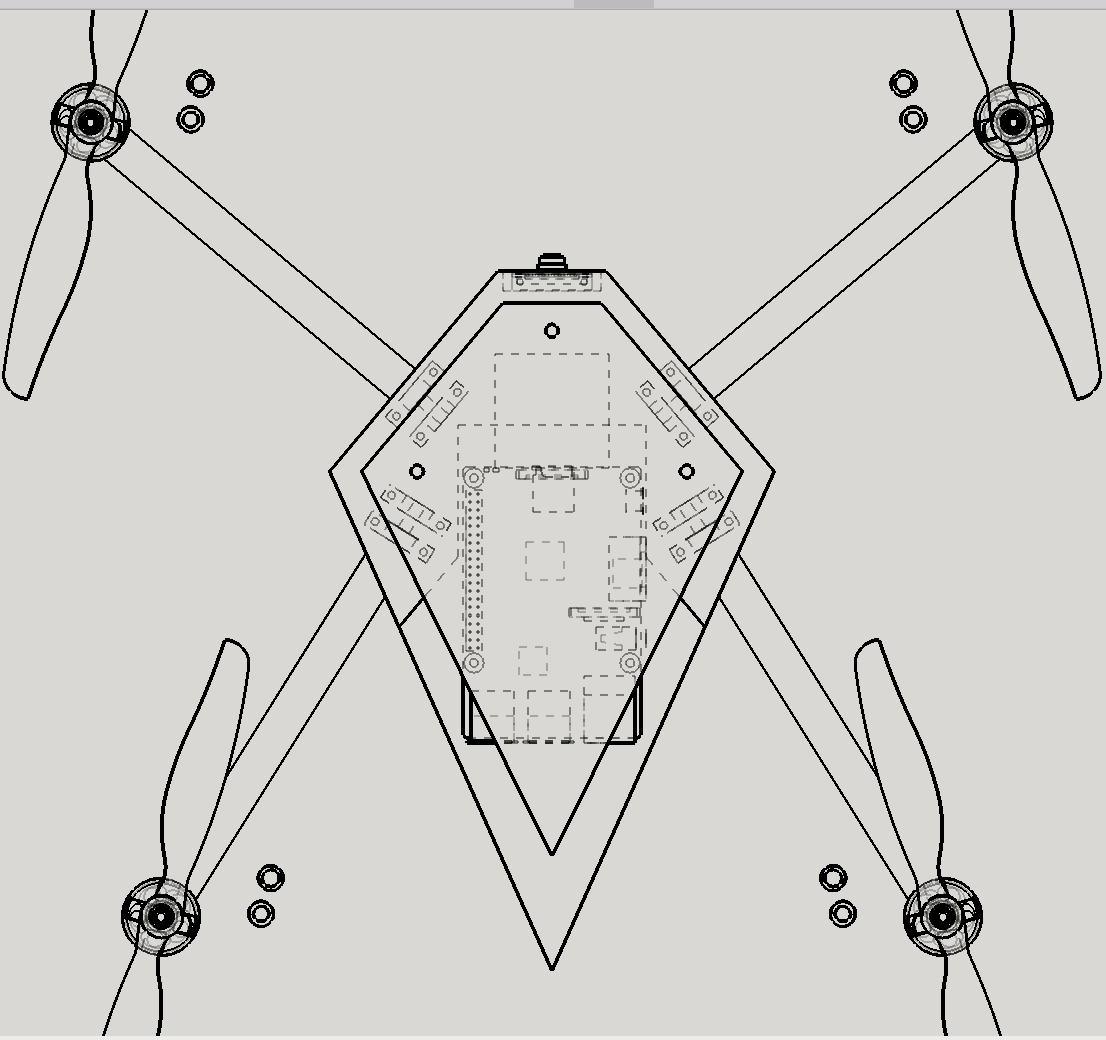
is there a spezific reason why the arms are not the same length and not 90° apart ? im not 100% sure if
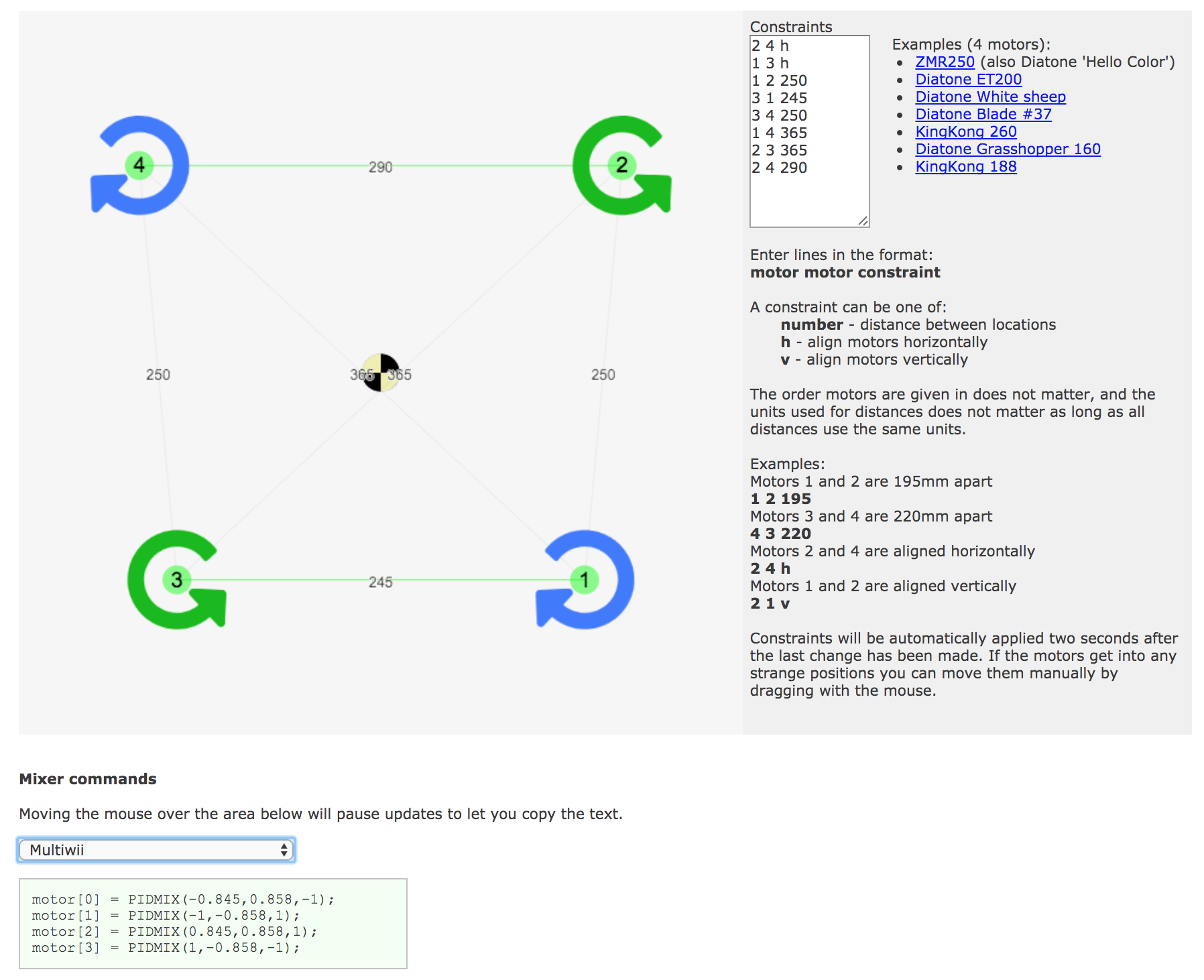
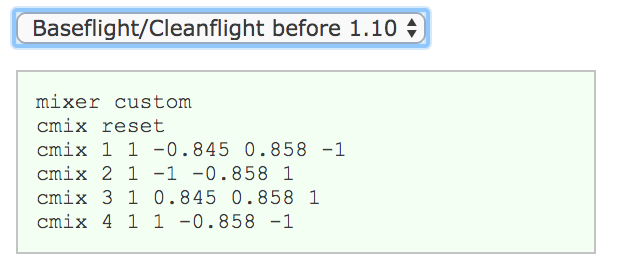
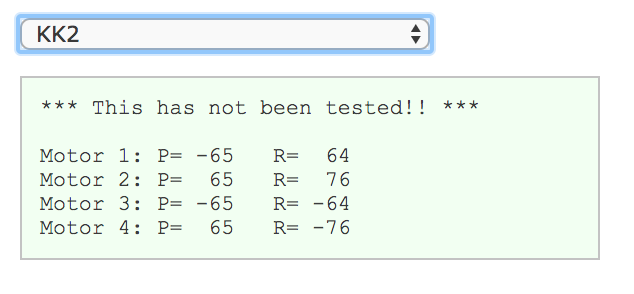
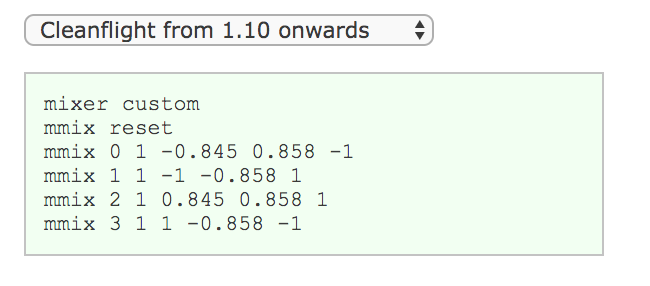
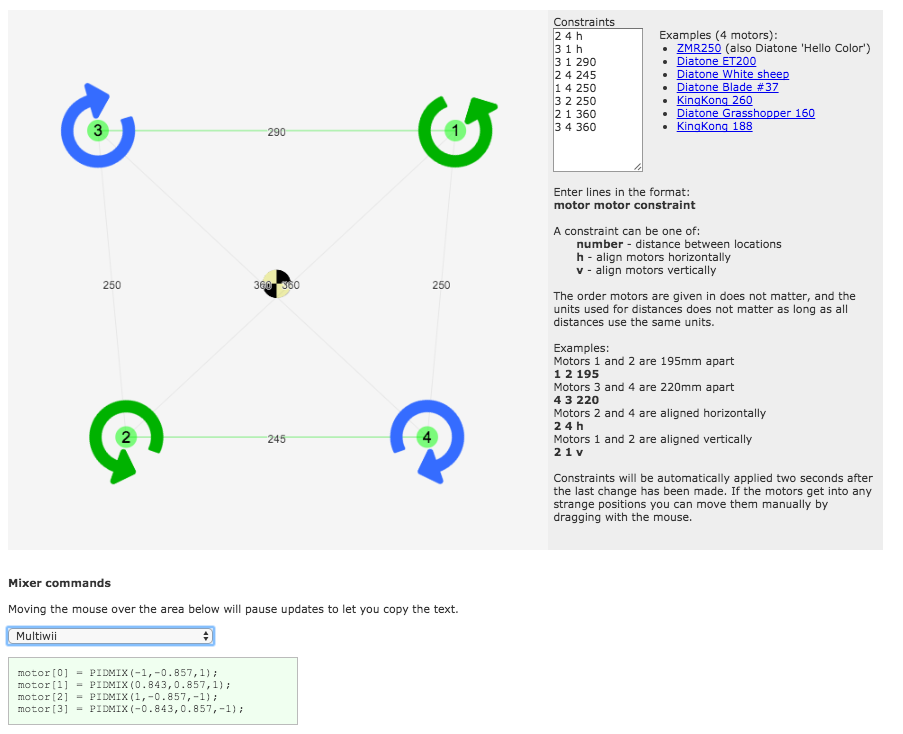
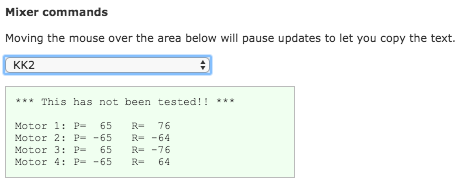
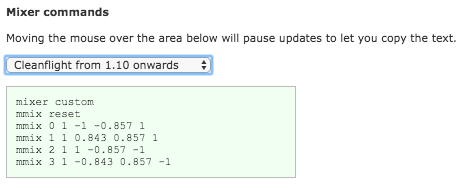
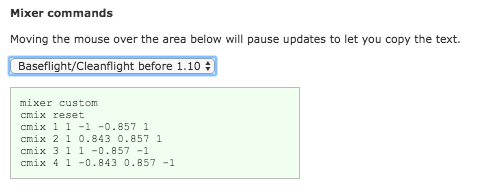
the standard mixertables will work very well, never tried it myself, but found a few sources:
if its your first copter you probably want to stick to a more basic design first
source: http://amzn.to/1Q5D3pN (but its in german, nothing really in there you cant find free on the net if you know what to look for)
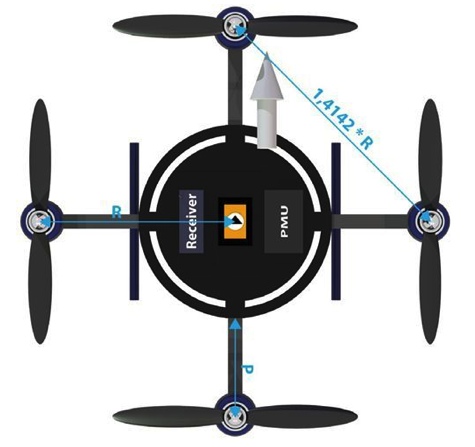
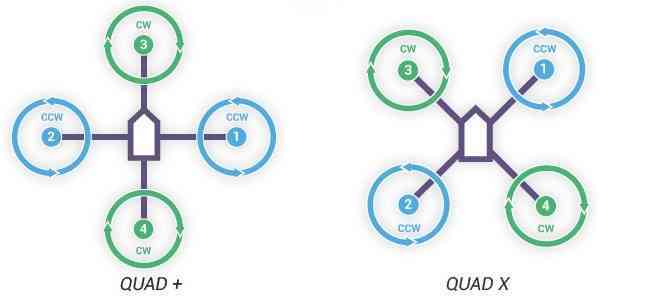
how the centerplate looks like doesnt matter as long as ist stable enough. an of course you can drive it in + or x configuration. just a suggestions…
Hi sicherlich_nicht. Thanks a lot for your insights
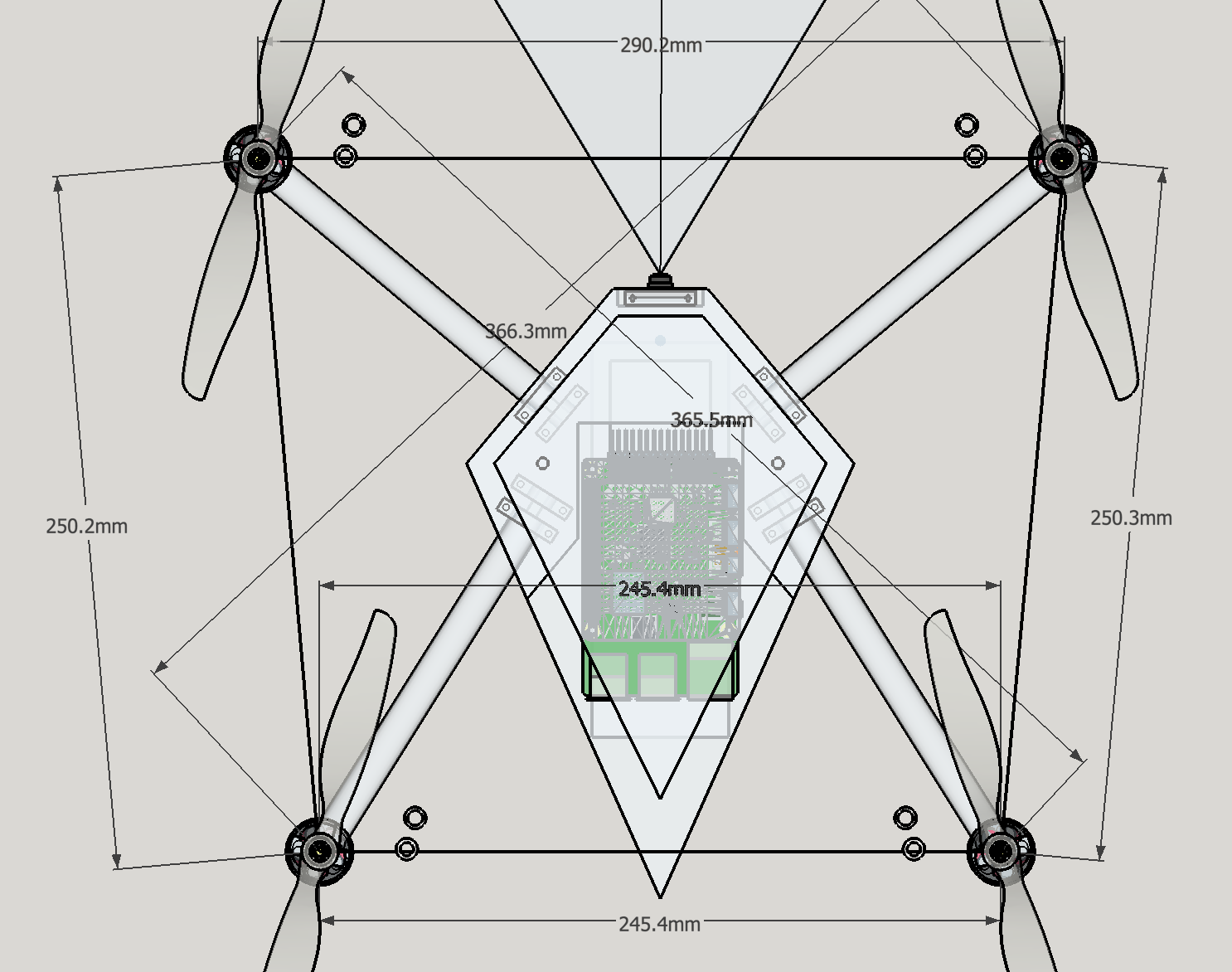
Yes. It is because I had to move the gravity center in order to fit all the components and also to move away the propeller from the field view of the camera.
I didn’t make any calculations although I am more tham happy to do all the maths as soon as possible and hopefully with some luck I will have a good result.
If I had to stick with a basic design I would just buy one frame from the ebay instead build although I totally agree with you that would be much easy.
i think its better to keep the numbering as arducopter expects it, though if you can change the mixertable
it will probably work as well. But i dont know about the PWM connections, they need to be connected accordingly
I do believe that would be considered a V frame type (aka spyder) in ArduCopter.
Motor numbering is same as an X. I am assuming they are doing roll/yaw mixing with the V frame type due to asymmetry. Never built one so don’t know the specifics.
that looks more like it, i googled a little bit , but i cant find anything quickly on the mixer settings in arducopter
probably hardcoded, not sure.
only thing you can chose is when you go to frame setup you need to select “V” Style (not V-Tail !!!)
but i dont know if there is anything else you need to change
Good Luck!
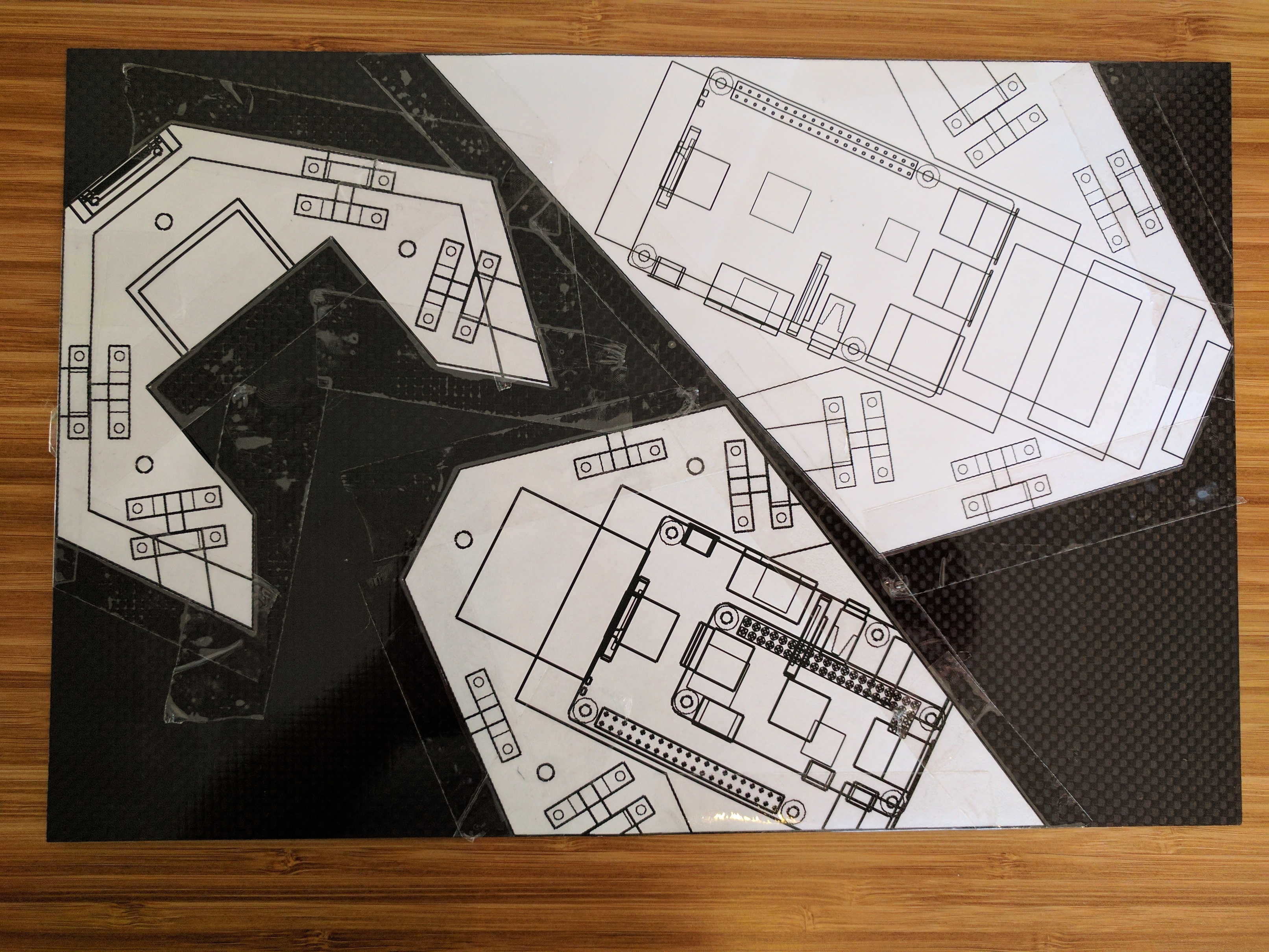
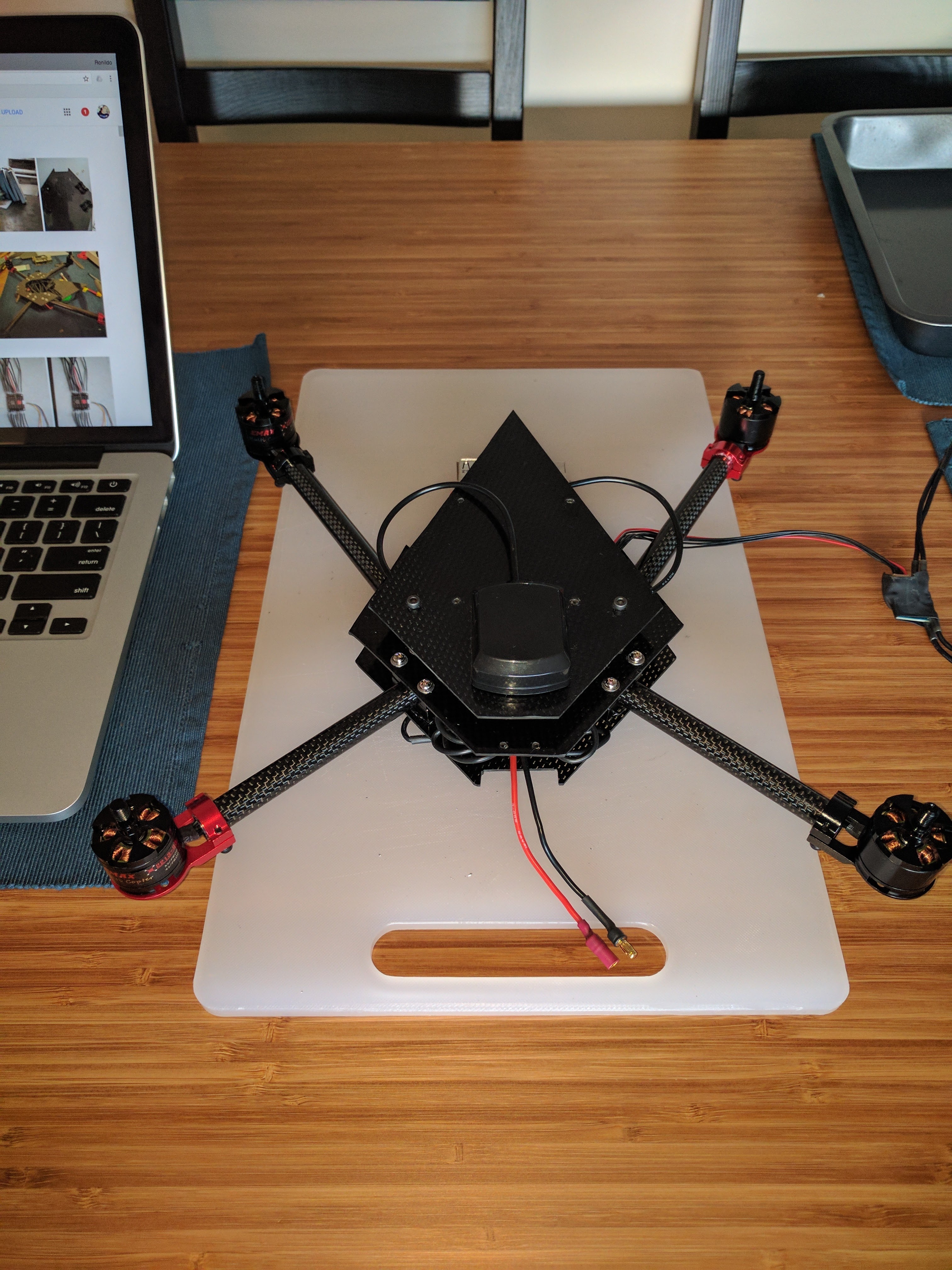
Hey guys I think I manage to put all the main parts together. This is the actual result of the frame. Battery still siting on the side so hopefully I will sort everything by today.