Over the past two years, I’ve successfully built several quads and hexacopters with Pixhawk and clone flight controllers. I love the idea of having ROS available on the drone itself for future robotics projects, so the Navio2 seemed like a perfect fit for my future builds.
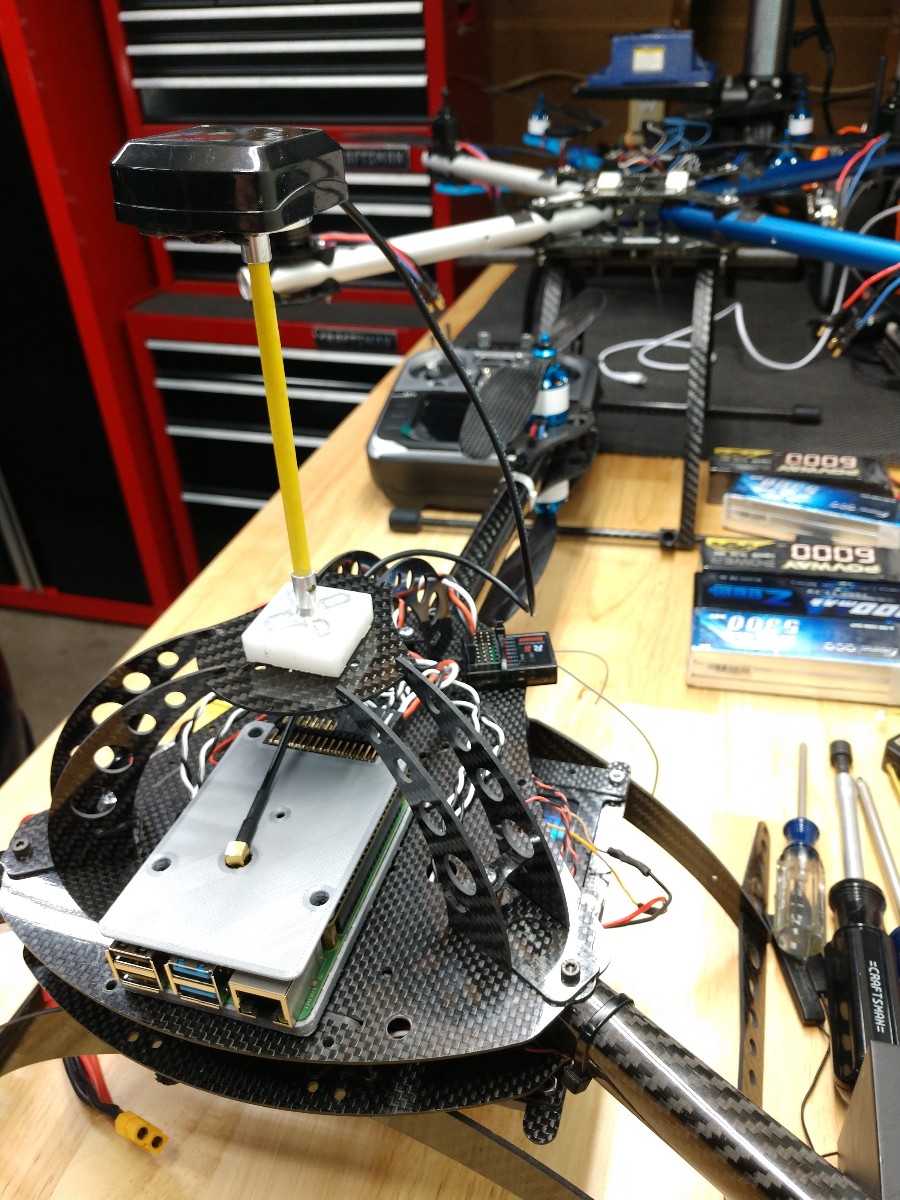
After a week of building, tearing down and rebuilding with every combination of flight controllers, three types of ESCs, different motors and frames, I’m left a little puzzled at the Navio2 and its seemingly erratic aircraft stability compared to even a first generation 3DR Pixhawk. I have purchased two full Navio2 setups; one is running on a Raspberry Pi 3 B+ and the other on a Pi 3 A+. Both fly the same:
In Position Hold, Loiter, or Altitude hold, the best result by far is the Pixhawk 2.1 Cube (black) with the Here GPS. As it should be - its price is well above the other two options. You lift off a quad, hex or Y6, and just hover perfectly in place.
A regular “first generation” 3DR Pixhawk with its older GPS and sensors performs slightly less well, and there is a little wander, but fairly acceptable across frame types.
Unfortunately for me, the Navio2 comes in decidedly last in stability and ability to hover without stick input in position hold; both altitude fluctuation and wander are rather severe. I admit I wasn’t expecting this. I’ve tried both Navio2 boards, three different Raspberry Pi boards, both GPS antennas, and all three different frame types, with several different ESC combinations. All produce this same result.
My question to the group at this point is, are the IMU sensors and/or GPS/compass utilized in the Navio2 just that much less accurate, and would I be wasting my time to try to fine-tune things from here to match or beat the Pixhawk? Or are many of you getting Pixhawk (or better) stability out of these boards? If so, I will try to figure out where the issue(s) are with my Navio2 builds.
I honestly do like the idea behind the Navio2 & RPi board combo, and am willing to put some time into tinkering with settings to make things work. But if the end result isn’t going to match or beat even a first gen Pixhawk, I’d appreciate knowing now so that I can change my plans going forward for these builds.
Thank you all for any thoughts on this.