Hi, just want to share my new Hexacopter with whoever is interested.
Goal was to use Navio2+RPI3 as FlightCtrl. Also wanted a more powerful copter to carry
possibly my Sony NEX3 and it should be foldable for transport.
Anyway after doing some research and calculations i decided to use a E800 Hexa-set from DJI
(found it on ebay for 250euros) and a 6S LiPo (from SLS)
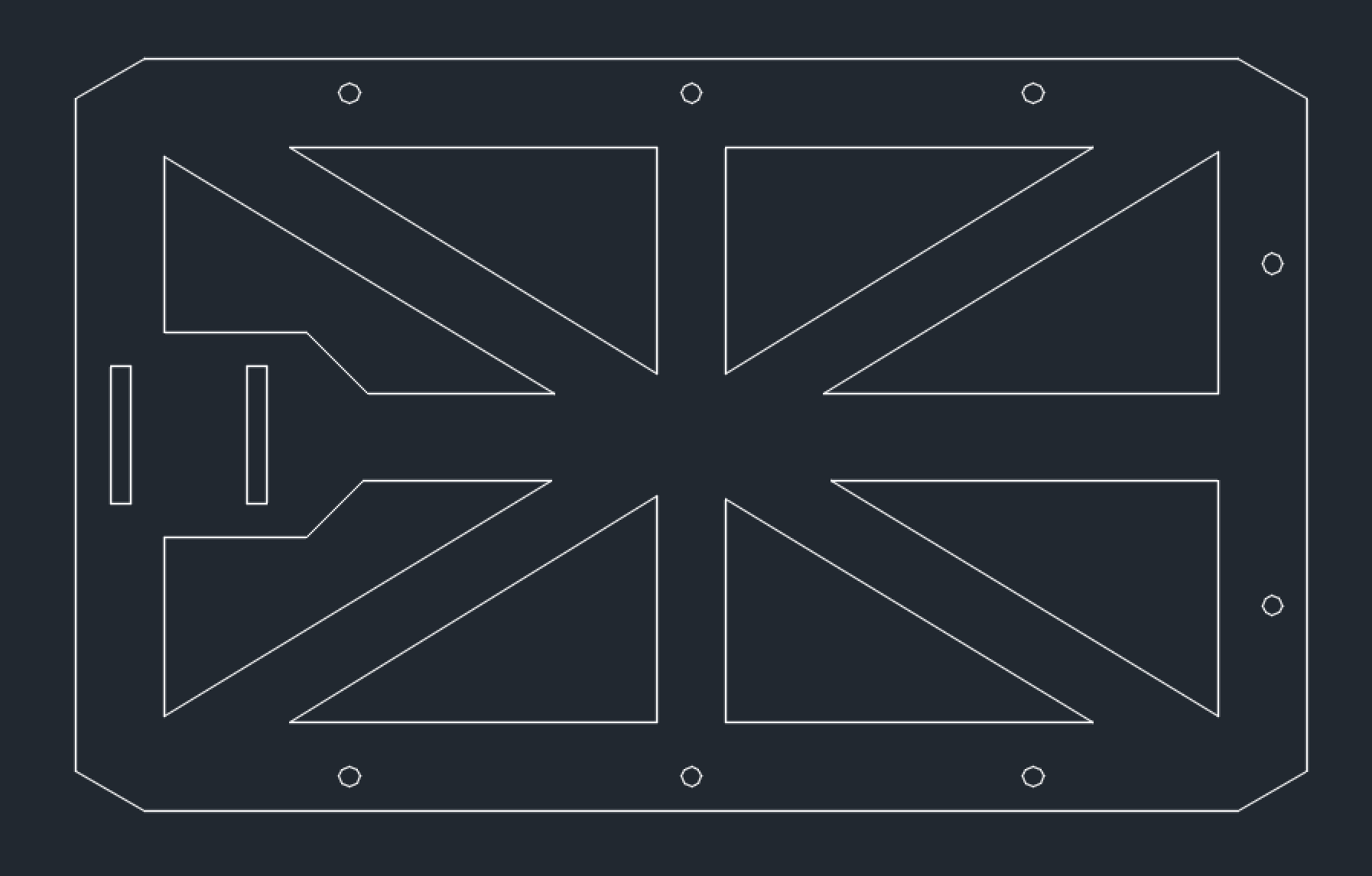
The frame is mostly carbon fibre with a gfk center plate and its foldable (from quadframe).
Motor-Motor distance is about 74cm.
I did not take detailed photos from the construction, since its pretty straight forward i think.
Battery cage i made myself on a CNC.
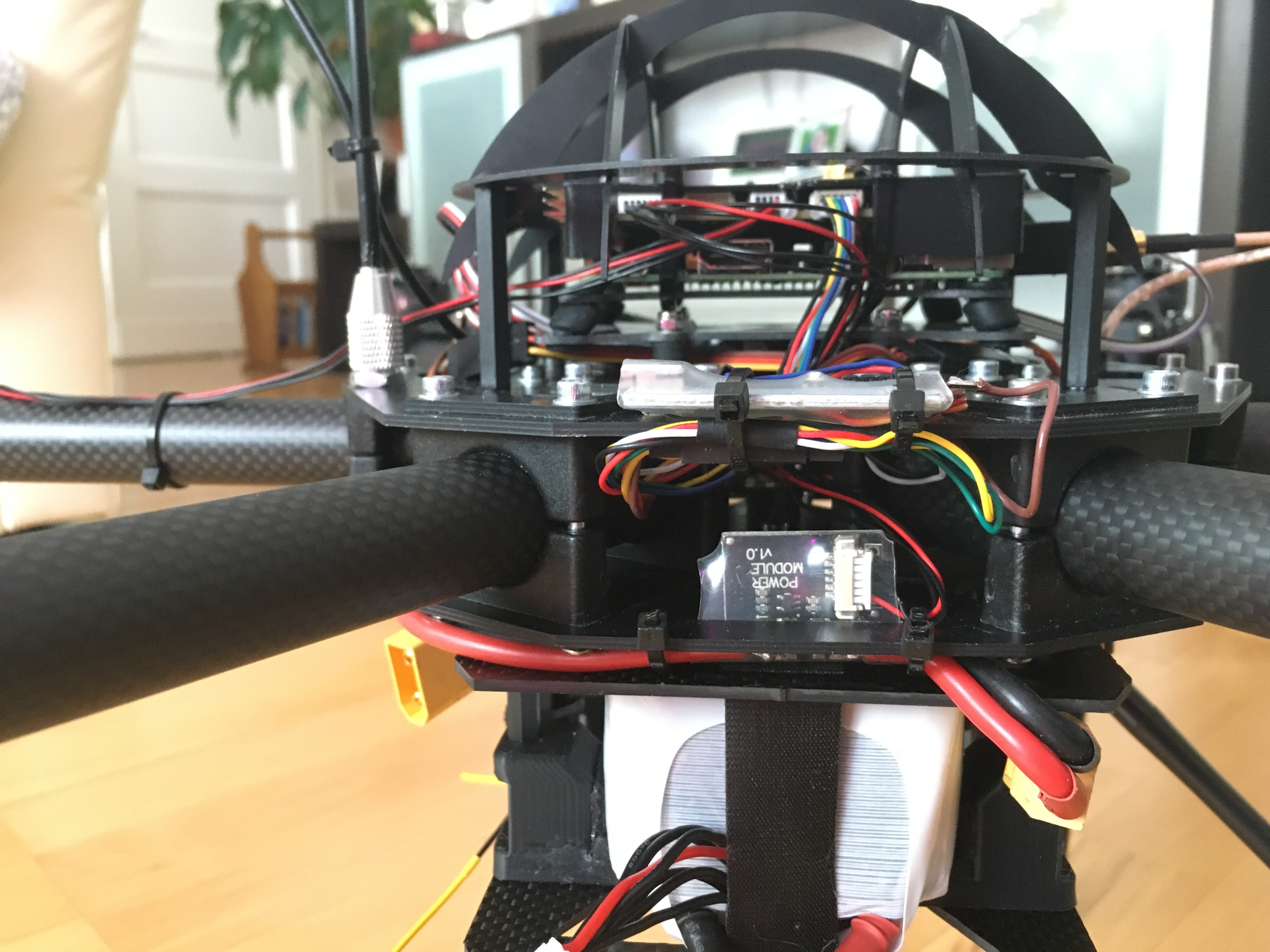
Problematic was the compass (using an external one now) and current readings where bogus.
But since im using a Jeti remote i have better options like a MUI-75 sensor, so current control is covered too.
maiden flight went well and i took some videos:
second flight not so well. i got a crash soon after takeoff, probable cause was a bad solder connection on the power distribution board.
after rework of the power distribution, got a better power board and used a more powerful soldering iron,
the third and fourth flight today worked like a charm. also had some time to test mission control before it started raining. Using an adhoc network with external wifi and QGroundControl on my iphone6s
thats how it looks folded:

folded hexa frame, props removed

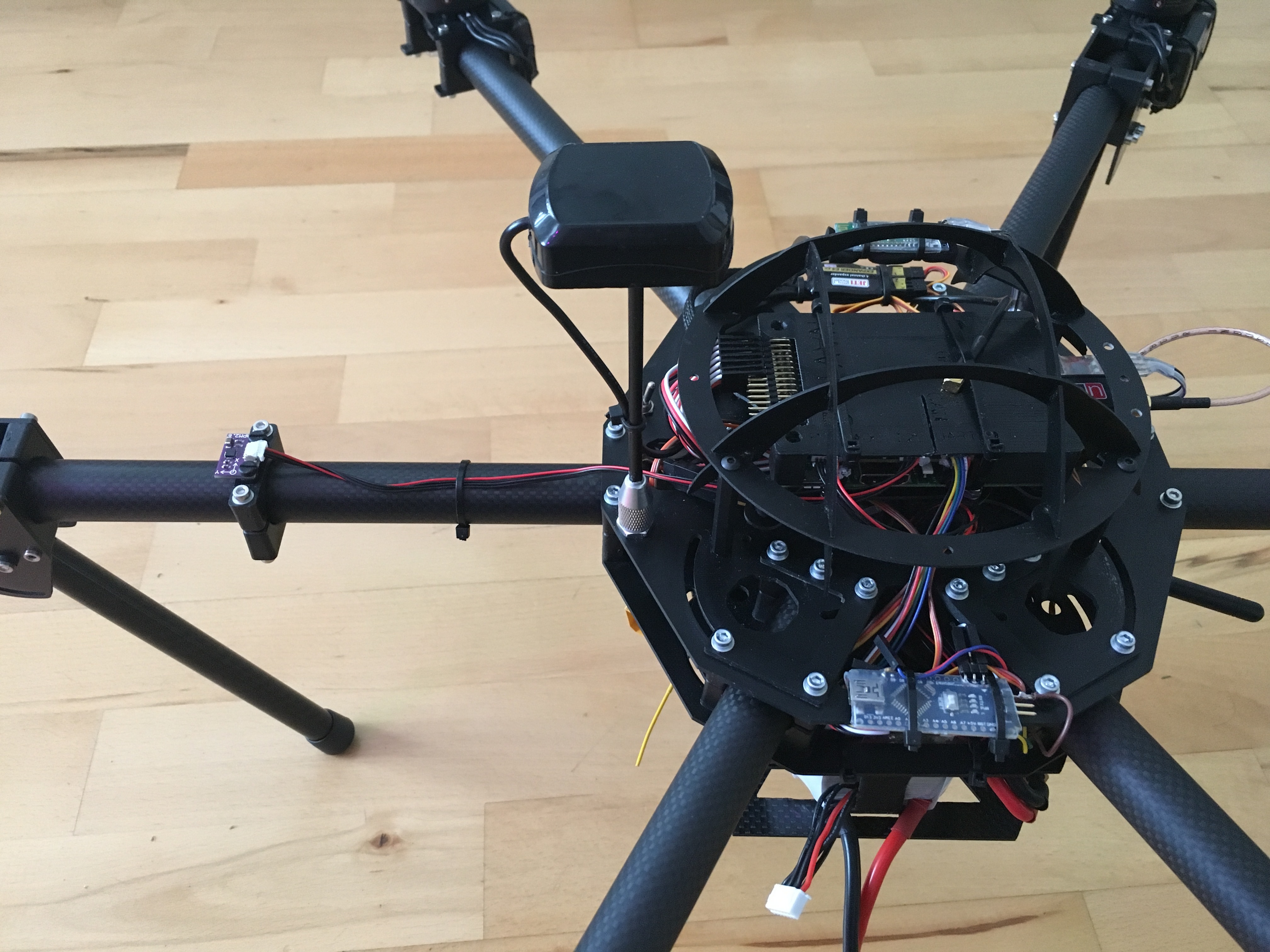
showing a closeup of the center plate, with BT-module connected to USB-to-UART module, JETI Expander,
and part of the GPS-antenna (right side). The switch on the right is to power down the RPI3 via a python script.
here a view from the other side, in front a ArduinoMini with Mav2Duplex, to transmit the telemetry of ArduCopter to my JETI DC16, connected to Navio2 UART and to the JETI Expander.
On the left you can see the external compass mounted on the rear arm of my copter
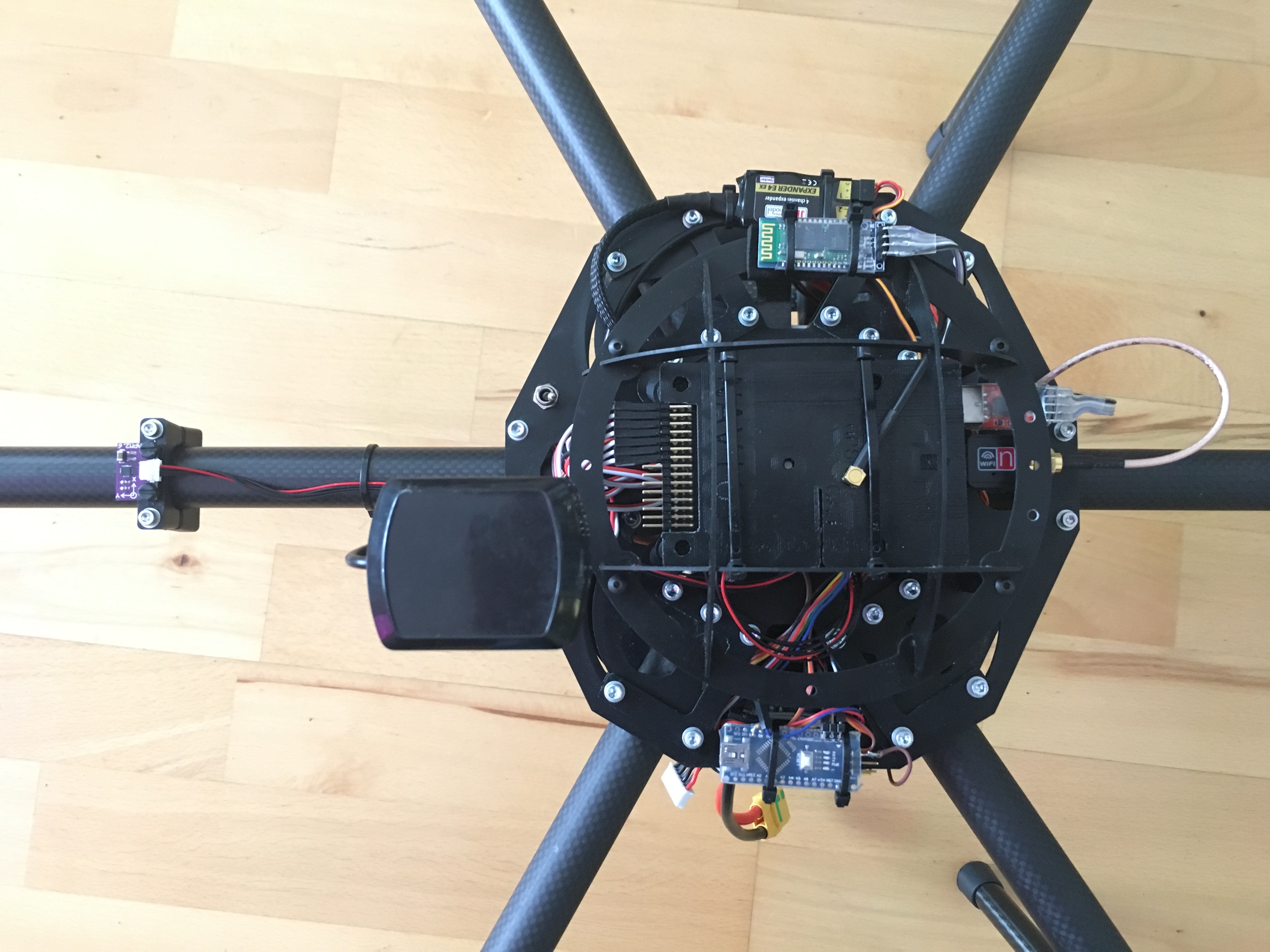
and here a top view, where you can see the wifi-dongle on the right with external SMA-connector
the Navio2+RPI2 is placed on an anti-vibration mount. All cable-plugs I fixed with a drop of hot glue (i dont trust those mini micro pugs ![]() )
)
sorry i dont have pictures of my power distribution board, its hidden underneath, but i used this one: http://r.ebay.com/qhgevR
thats its for now
have fun …


 I think I’ll be ordering one for myself too.
I think I’ll be ordering one for myself too.