



I can’t seem to find the GPIO numbers of pins 13 and 14 on the servo rail. I’m trying to use them as AUXOUT inputs for a range finder but can’t figure out which pin to declare in ardurover. I included screenshots of what I mean. Is it even possible to set these pins as AUXOUT pins like other flight controllers or am I out of luck?

Hi Aryan,
Sorry for the delayed response.
Could you please specify what exact rangefinder you’re using? This might help to see if it’s possible to configure it on Navio2.
Some of our users tested Benewake TFmini connected via UART. You can take a look at Marc’s thread to learn more about it.
trying to use an extremely cheap hc-sr04. Ardupilot rangefinder page has support for it I’m just extremely confused about what auxout pin to select.
You may have to set BRD_PWM_COUNT at 4 in order to use GPIO on pin 13 and 14.
https://ardupilot.org/copter/docs/common-gpios.html#gpios
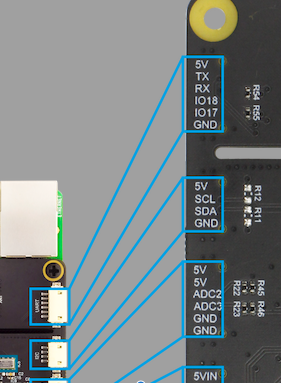
You have also GPIO 17 and 18 available from UART plug.
Did you get it to work?
I’m trying to use the same type of sensor, but I am a bit unsure of what pin setting to use for RNGFND1_PIN and RNGFND1_STOP_PIN if I want to use the AUX channels on the Navio2? If I connect the sensor to pin 13 and 14, do I set the parameters to 13 and 14 also, or is there a different mapping of GPIO as with other boards?
Hi @TN99,
To use the servo rail pins, you need to configure them as GPIO. They aren’t acting like GPIO by default. You’ll need to write the script that handles values from those GPIO pins. You can refer to this docs section for the details.
Please note that GPIO17 and GPIO18 are available for usage on the UART port. You can use them to set up parameters for RNGFND1_PIN and RNGFND1_STOP_PIN. Their pins’ numbers should be 17 and 18 accordingly.
Is there a way to not only enable the servo rail pins but also assign them to the AUX 1-6 functionality of ardurover? As far as I can see in the parameter settings, only the select few pins will get accepted and written to the navio.
RANGFNDRx_PIN pretty much has to be AUXOUT1-6 (if I want multiple Sensors). Other values than given in the MP seem to be rejected during write.
and RANGFNDx_STOP_PIN could be AUXOUT but also could be a Relay pin (which seems to be implemented in Navio).
It seems feasible with a script but it would be great if emlid could provide one and document it. This seems to be quiet a hole in capability compared to other controllers.
Again for reference:

Thx
Andreas
Hi Andreas,
As Liudmila has mentioned, the only pins that can be used as GPIO additionally to the servo rail pins are the GPIO17 and GPIO18 on the UART port. They can be configured as relays according to this ArduPilot guide. The PWM output can be enabled through servo rail pins only.
Currently, we’re not planning to add specific scripts to our documentation. We’re keeping all of the standard configurations in the docs only. However, we’ll think about whether it’ll be possible to make this clearer.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.