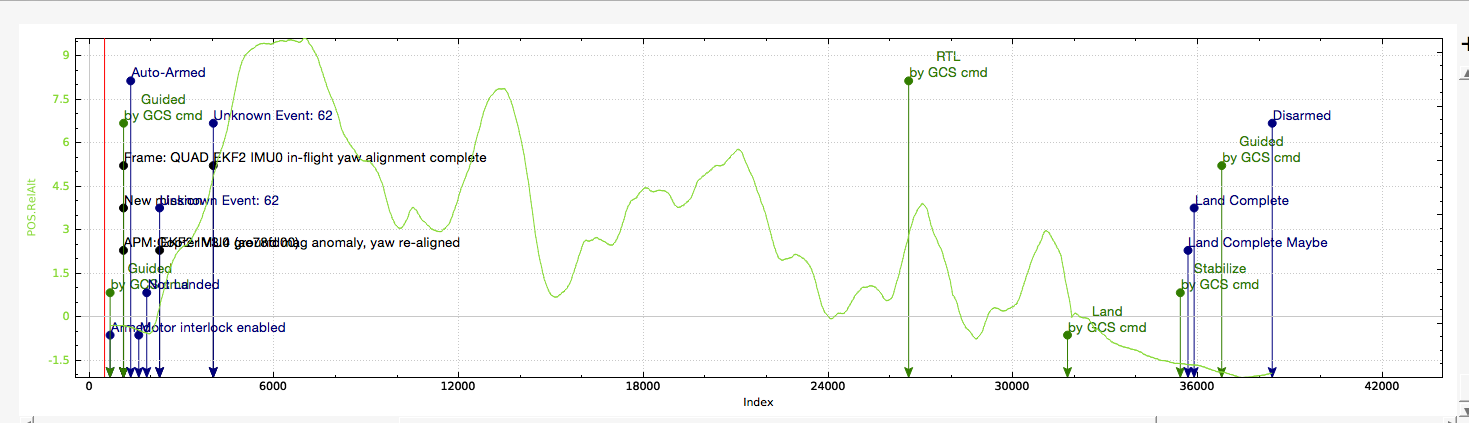
I was having very stable flights in GUIDE mode, until I noticed lately that after sometime of successful takeoff at desired altitude, the drone start to oscillate in altitude up and down and does not maintain the desired altitude (10 meters). Here is an example:
All sensors have been calibrated, batteries are full, and ESCs are calibrated, GPS with +10 SATS and HDOP 0.8, and it was flying pretty much good with no major issues. I just add that the weather was kind of windy but the drone was able to take off and maintain a stable flight for some time.
is it possible this is a power issue? RCOU is quite high and your voltage drops from 12.x to 9volt or below; could you try with another battery capeable of higher C-rates and/or bigger capacity?
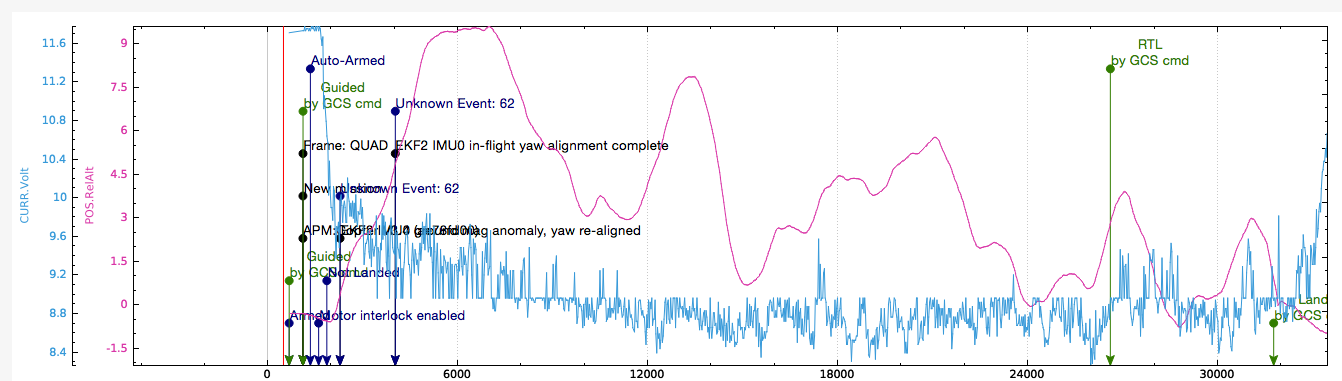
Here is a plot for oscillating scenario. There is indeed a drop in voltage from 11.5 V to below 9.0 V. But when I measured the battery (offline), it never gets below 11.0 V at all. I do not know how and why this voltage drop occurs during the flight.
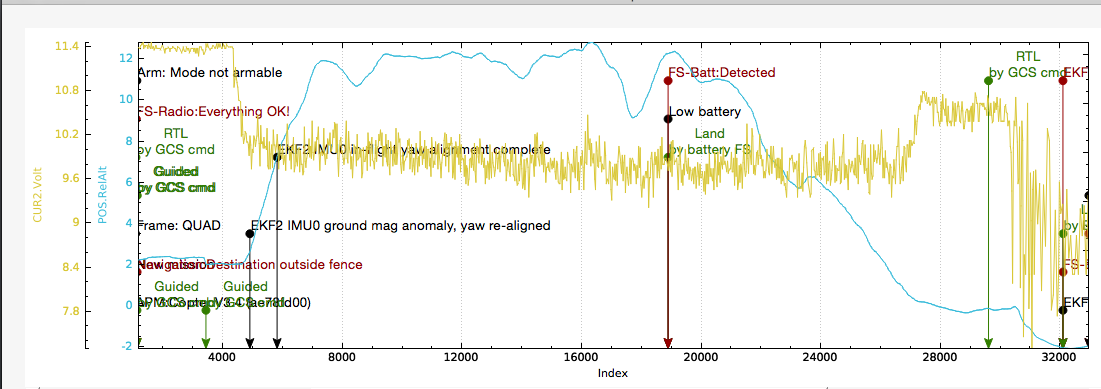
In the figure, we also notice a voltage drop from 11.5 V to 10.2 V and this is why FS-Battery was raised because I set the threshold to 10.9 V. The problem is that when I measured the battery after this flight, I found it above 11.3 V. So, I am not sure why low voltages are report while the battery still have capacity.
Could it this be related to oscillation problem?
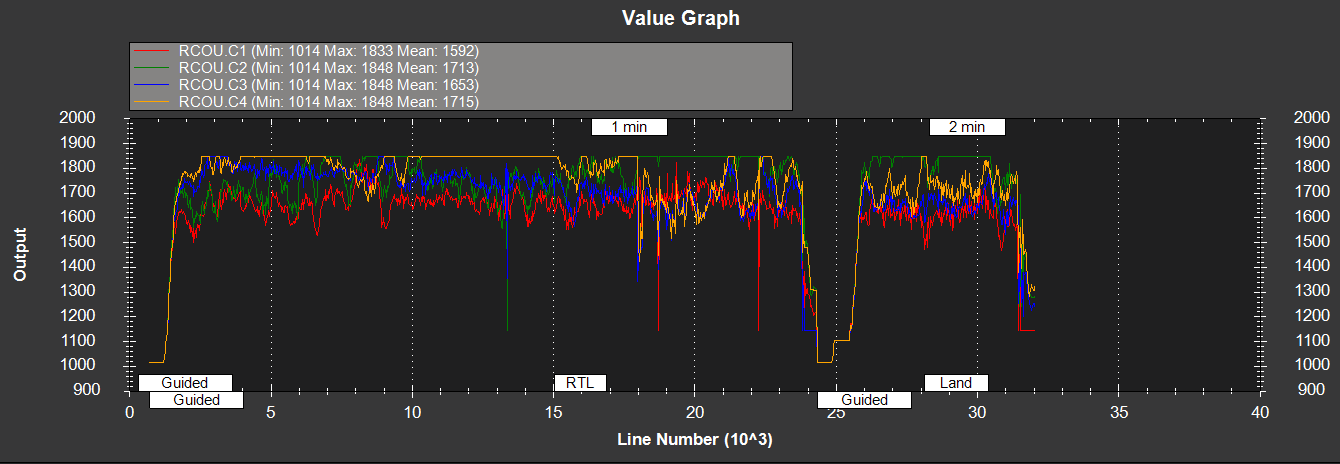
Also, I did not understand the meaning RCOUT. Can you explain how to interpret it?
range of PWM out is something between 1000 and 2000 ( a little more or less); your values are quite high during flight;
battery voltage drop:
batteries are rated for a specific current;
c-rate of your battery for example 20C means your battery is rated for 20xbattery capacity; for example 20C battery with 2000mah can deliver 40Amps; a voltage drop of your lipo is normal;
you shouldn’t discharge your lipos below 3v per cell ( 3s = 9volt);
if your voltage of your fully charged drops to 9v very quickly after take off there is something “not so right” (bad lipos, old lipos, lipo is not suited for the current (aka C-rate))
if there is no load on the battery it is normal that the voltage increases again;
your c-rate should exceed the max current of your motors;
your current module shows you are using 3 Amps - I assume thats wrong except you have a very light copter;
but I’m not completely sure if this is only power related…
I think my Lipo battery used in the latest test is not the worst I have, as it is VENOM brand with 3cells, 5000 mAh and 35C. I have other three-cell batteries (brand Floureon) that are older but with the same specification.
I have 4-cell battery, but the latter when used led to burning 3 times the ESCs (20 Amps) of my drone, in particular when it crashes to ground or flips. I read that some ESCs should not be used by 4-cell batteries, that is why I am using the 3-cell batteries.
The first tests were good, I am not sure why the latest test had this oscillation problem!
Still an open question …
what motors do you use? do you have any specs for them?
ESCs are designed for a specific Amp rating - which is related to heat dissipation; (assuming they are capeable of your voltage);
your motors draw different current depending on the props you use and the voltage you provide them;
bigger props - more current;
for example - much too big props on your motor will draw a lot current but will not give you much lift (for the watts you invest)
so if your ESCs are capeable of 4s lipos - you most likely need to reduce prop size to stay efficient (and also to not overload your ESCs if they are not rated for the current the motors use)
(more or less good quality) motors come with a datasheet which already tells you the most efficient prop and voltage setup;
www.ecalc.ch is a good adress for help with your setup!
I hope I’m not confusing you too much…it’s all kinda complicated…just ask if something is not clear…
The motors and ESC I am using were coming from some other drone I bought from another manufacturer. I do not have their exact specification but seems to OK so far.
I guess there’s nothing I could add on the issue. Thanks to @panky who’s done an amazing job. I also suspect weary batteries. The voltage drop is very suspicious indeed. You could try the latest Beta (it’s gonna be labeled stable anyhow) or download AC-3.4.4 from here.