My problem is that during the flight my X-type copter (DJI Flame Wheel F450) is unstable in the roll axis.
First it goes right, then it might stay level for a while, then it goes left and so on. I get the EKF2 IMU0 ground mag anomaly error, similar to this thread: Navio2 Altitude Oscillation, also compass variation and bad AHRS. Also during the Mission Planner Compass/Motor Calibration the interference rises to ~80% with 50% throttle and the calibration always fails. I’ve calibrated the compasses multiple times. I only use the Navio2 internal compasses.
My ESCs are DJI Octo E300 and the motors are MultiStar 2212. The flight was stable in the previous build of Navio2 (from the end of 2016) but now with the new one it’s doing weird stuff.
So to sum it up, it seems to think it’s tilted even though it’s level and tries to correct itself.
What could be causing this?
i reviewed log 49, i can’t see anything seriously wrong with my untrained eyes…
could you post a pic of your copter and a close up to navio? and maybe a short flight video?
indicating you need to place navio further away from battery/escs/motors/high current cables; or easier: you might need an external compass like hmc5983
how doese he do that? very sharp movements or is he just drifting away from side to side; you were flying in stabilize mode which does not really correct for drifting away; you can do autotrim (or trim save) to correct for drifting;
Hey there.
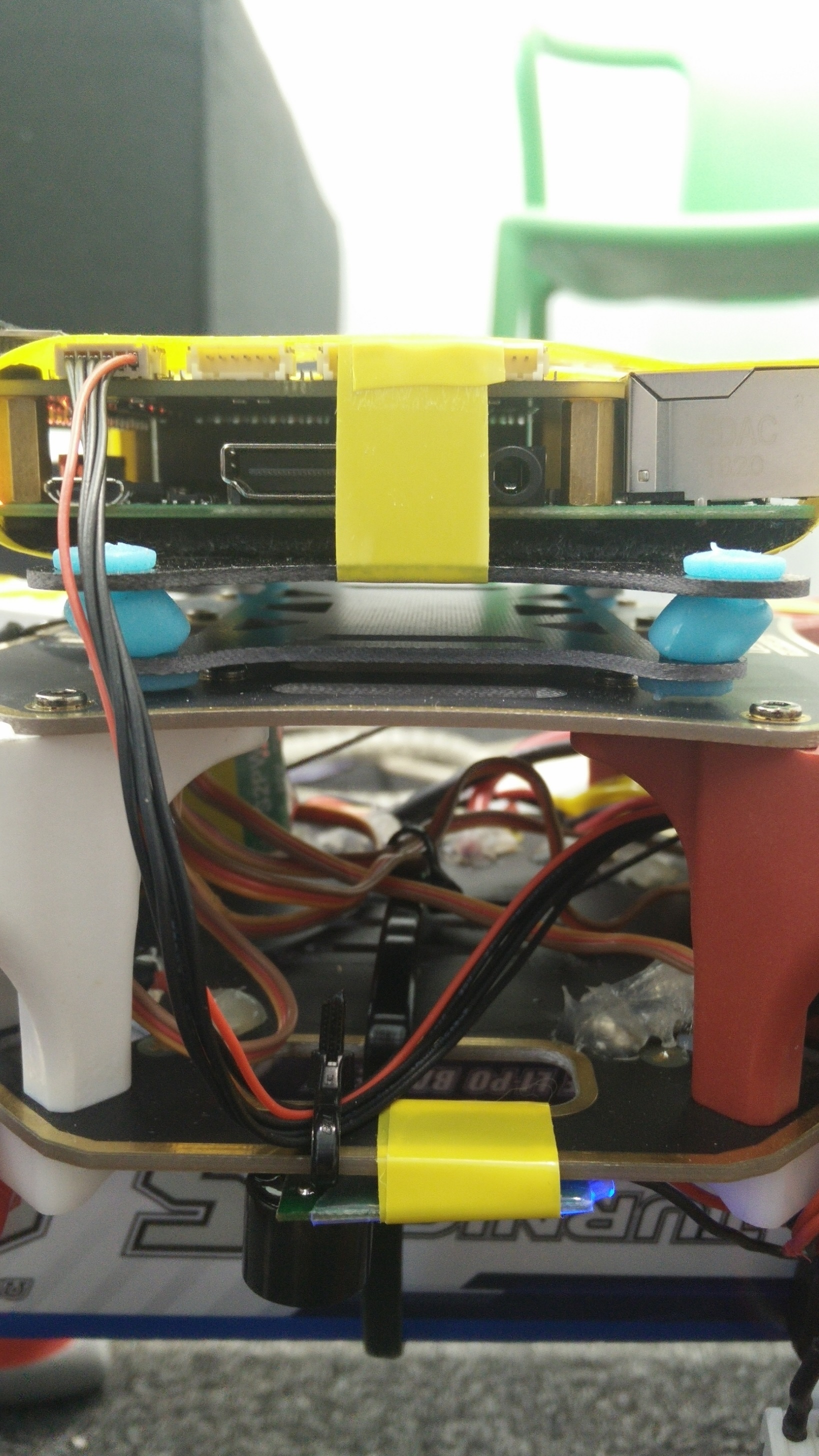
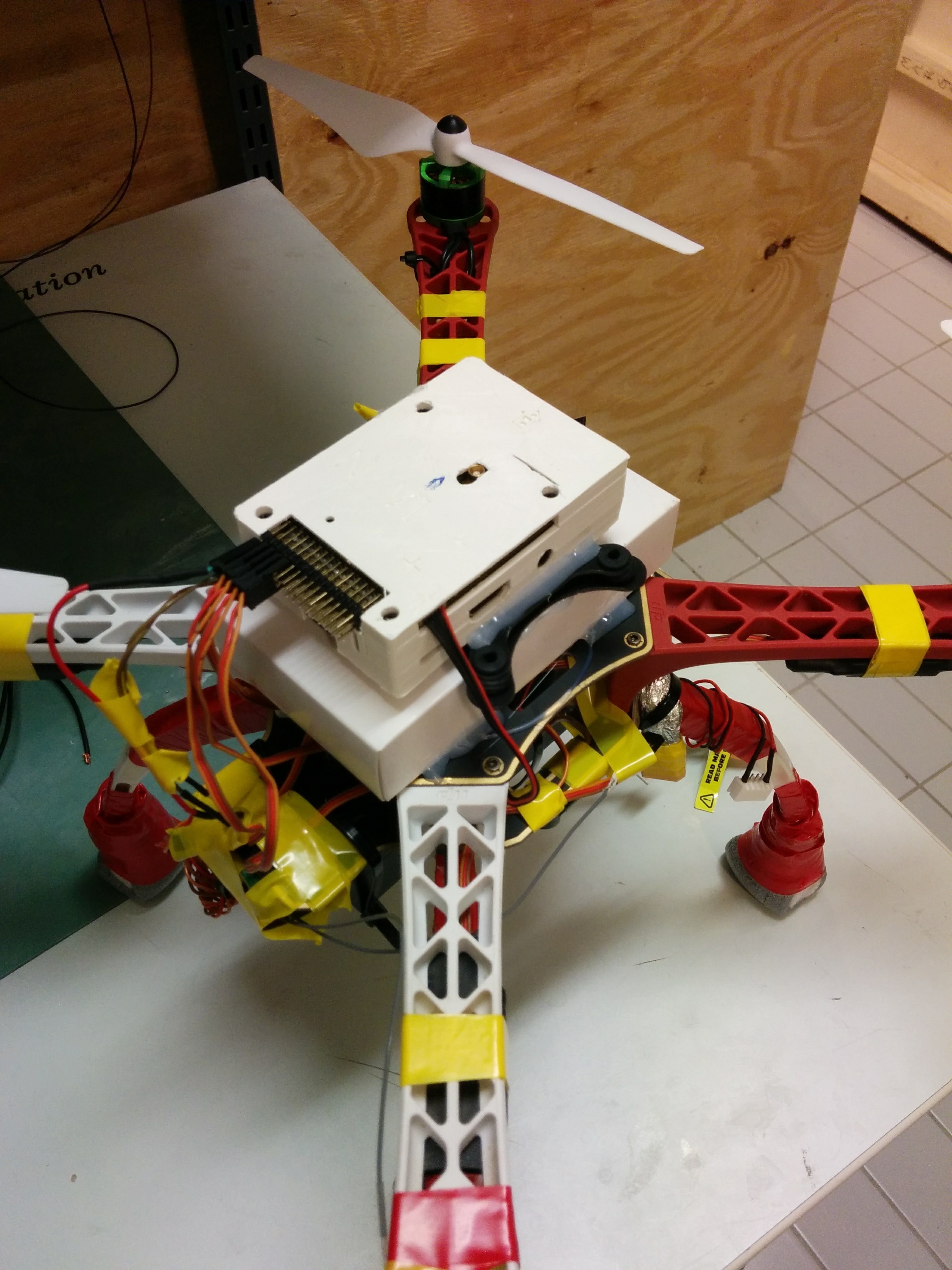
Here are some pics of our drone. We have it quite securely fastened to an anti vibration mount. All the wires to navio are fastened to the frame in such away that they shouldn’t bend the navio.
I’ll post a flying video later (at the moment the problem seems to have decreased as I moved some of the high power cables further away from navio).
It’s kind of a drunken sway. The drone may lift of perfectly fine, then slowly start drifting to the left. At some point it may balance out, be perfectly stable for a while and start drifting to the right. This sort of oscillation continues for the duration of the flight.
To describe it more, it feels like somebody else is controlling the drone and trying to fly it to the wall. Also when the drone is drifting the most, the HUD falsely shows the drone is tilted to left (or right) even though I’m keeping it in a stable hover.