When I connected it directly to battery - it was rebooting in loop (like voltage was too low).
The RPi was powered via this ESC integrated BEC 5v via Servo Rail - and the diodes connected to power rail of servo were blinking like voltage was unstable and dropping.
Power module does not power servos. To provide power to the servo rail plug your drone’s BEC into any free channel on the servo rail. Use BECs that provide voltage in a range of 4.8-5.3V. If you’d like to use high voltage servos use a power separation board.
OK so completed my test bed scratch built yesterday.
As you can see I did exactly what Tatiana instructed. Nothing attached to the USB ports and power is only achieved via the servo rails.
I did 3 flights yesterday. On the second and last flight I performed Autotune. Will do 7 more flights like this and report back if I observe any anomalies.
After 10 flights total I will add the Usb adapter to the drone. And continue test.
First, I’d like to ask you to raise the GNSS antenna and locate it on a ground plane. A ground plane should be made from a conductive material and be no less than 70 x 70 mm.
OK the log is attached. Question. Is the groundplane really neccesare for the navio 2 Gps. I do not have any interference or GPS problems with it mounted like that?
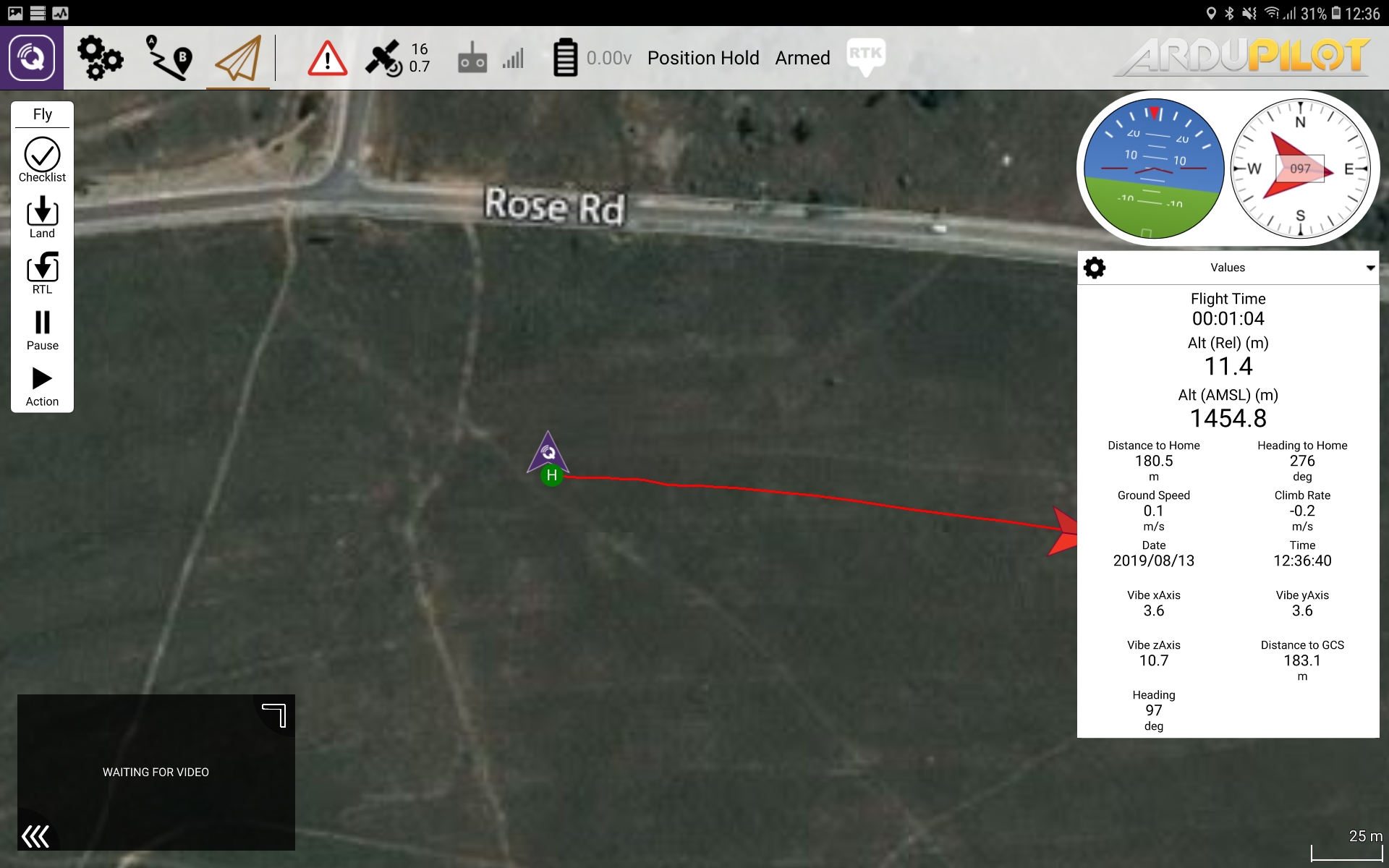
I actually got really good results out of my Quad today.
This hover was done in 15 knots of wind and in poshold it just kept its position like it was glued in the sky.
Then decided to do a range test using just the Raspberry pi 3 + onboard wifi and managed to push to 200 meters. So really impressed with my setup at the moment.
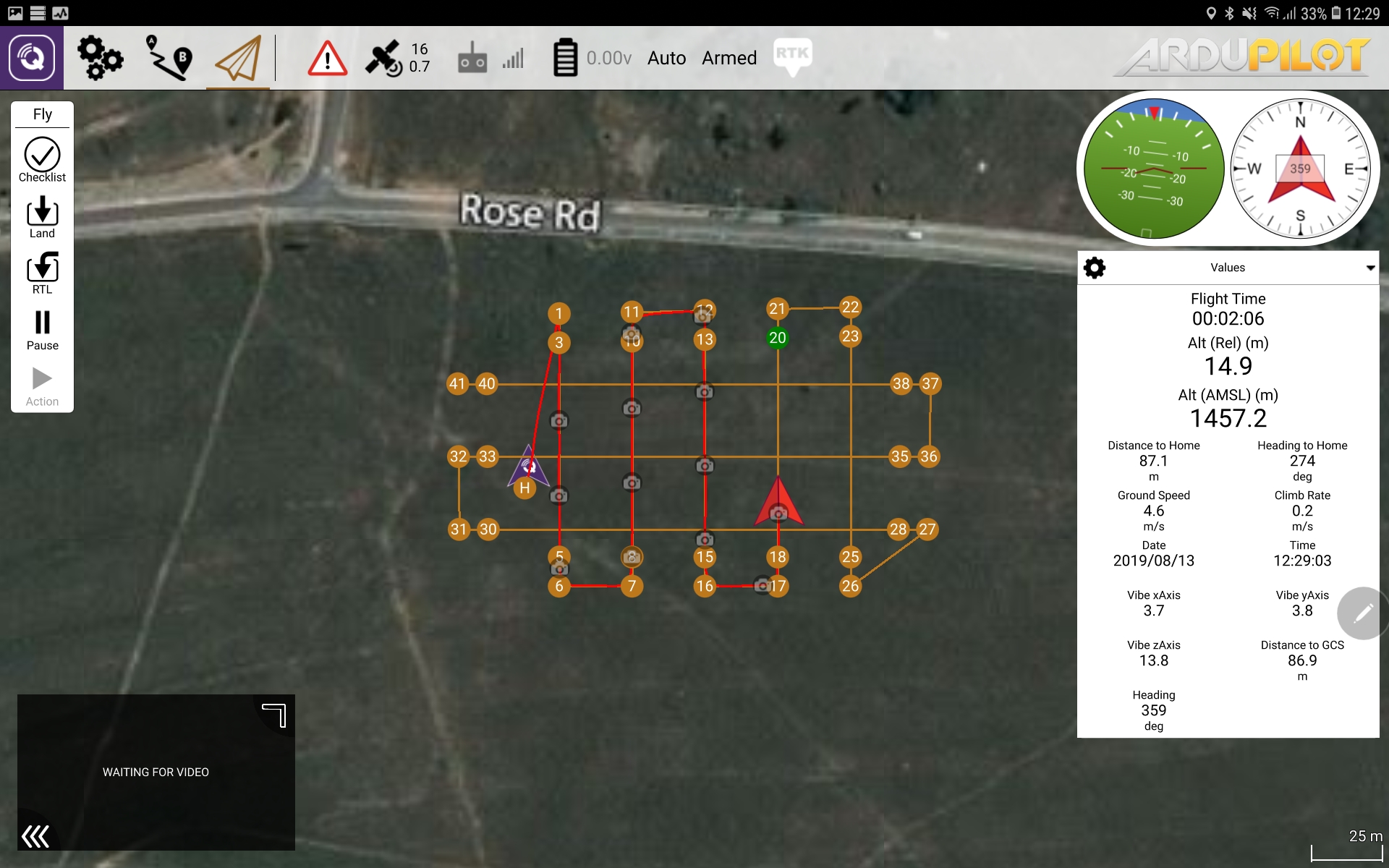
Here is the crashlog we have all been waiting for. 10 flights without any peripheral attached to the USB ports and flights were beautiful.
Then this afternoon I attached my USB Wifi range extender and halfway through the flight it did exactly the same as it did before. All of a sudden roll to the right and crashed.