



I actually think I am going to trash my navios or rather use them on a rover. I am not willing to be an Emlid test pilot at my own cost
I’m looking at my grand-grand father’s book in aircraft engines from 1936…
My father who worked 40 years as professor in Zhukovski academy can’t believe I made my drones myself…
I myself unfortunately missed to associate with aviation.
But luckily we are all priviledged to live in time when technology allows us to build, fly our tiny creations and control them and program them - even without airfoil and structural materials engineering knowledge (like in my case), in our context - with many thanks to such project as Arduino, Raspberry Pi, and especially Navio - because for many like me - Raspberry Pi was the door to the sensors and PWM, more than Arduino.
Why I’m writing this? Just in case if some other people read this - aviation has a spirit. Its not all about the costs/time/etc…
I am also an aviator and let me tell you if you lose more money than you make then it is not worth it. My assumption with dealing with Emlid is that they do not know how two troubleshoot the Navio2. As they repeatedly say. There is not a lot that they can do so I will rather throw my to Navios in the trash.
All they have done here is to repeat what other people have already said and observed so they have noooo clue.
So lets go through what Emlid asks me to do
-
“Reflash the SD card with the latest image” How many more times must I do this?
-
“Start with a standard setup: connect ESCs, motors, power module + battery, and RC to Navio2 (without other devices such as Ubec, Wi-Fi module, etc.)” This is exactly how I have set up the drone
-
“Extensively test this setup flying not very high (on 1-1,5 m above the ground). Make sure the issue doesn’t appear again” How many more times must I fly it like this?
-
“Connect the components from your additional hardware set one by one. Thoroughly test the setup on the ground after connecting each of the components” How many more times must I do this?
-
“Record the logs all the time so we can catch cycle delay if it emerges again” Why must I do this again if you already have a log with this. I have told them not once but a couple of times that the last crash was the ONLY time out of about 10 crashes plus that I was able to retrieve a log.
1 Like
OK Emlid and Tatiana.
I am going to indulge you here and rebuild using my cheap propellers and frame.
I will take step by step photos of the build but please do me a favour. What must I avoid in my hardware setup and build to prevent software loops as described above?
Then I will do an average of 10 flights with no peripherals attached.
Then I will do an average of 10 flights with my wifi extender attached to the USB port and see what happens.
However I do not think that flashing the SD card is a good idea. What I think I need to do is have 2 SD cards, one with the current image and one with a new flash and compare. What do you think
1 Like
This is the only peripheral that I attach to my raspberry pi.
https://www.pishop.co.za/store/wireless/wifi-dongle---ultra-long-range-high-gain-w-5dbi-antenna_1044
And since I am now an Emlid test pilot please feel free to send me as many propellers and cheap drone frames as you want 
1 Like
I for sure will treat you with dinner and other treats if we meet one time.
Thanks for your help.
Have you had a look at the image yet Anton?
Give me 2-3 more days please. I just finished with hardware part of my drone and now putting my software hat on.
So this is the test rig.
This is how I connect my power for all my drones. Only UBEC to power the servo rail as instructed. No power module
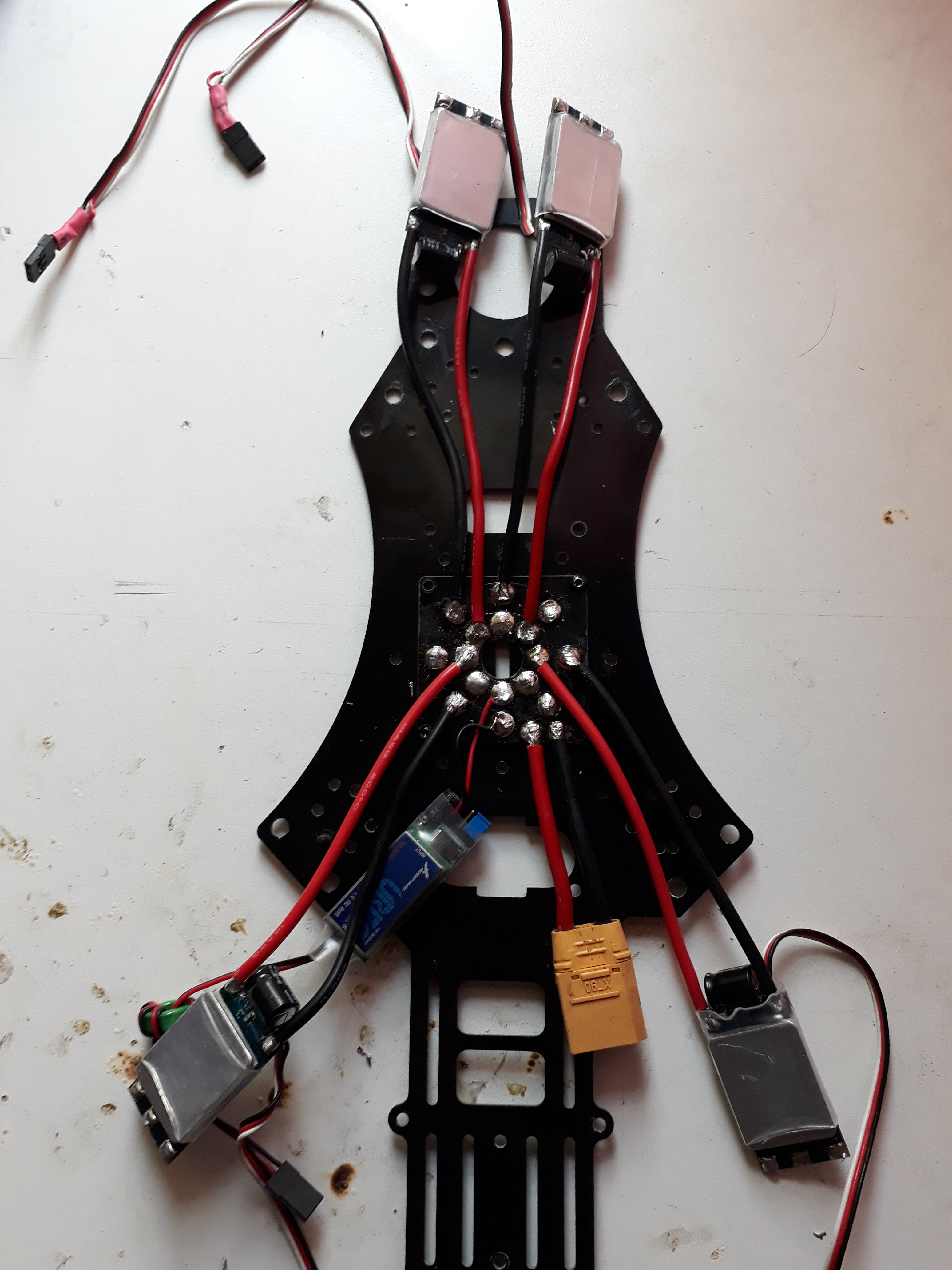
What PDB are you using? Does it stabilize voltage from batteries?
@tatiana.andreeva / other community members - please help looking on this
No but the PDB has no regulation but the UBEC is a switching UBEC. This is built as per your Docs on your website.
You definately need Power module to power the ESCs.
The ESCs will cause interference for each other and battery.
And battery will provide unstable voltage under load, if there is no Power Module.
In the documents the Power Module is mentioned.
Other members: please correct me if I am wrong.
PS: just to note, I am not associated with Emlid in any way, I am just same community member.
I feel there can be some sort of confusion.
The ESC’s get their power from the PDB and are OPTO escs
Can you please share model name of PDB or if it is unknown, picture of its back side.
I’m quite sure it needs a Power Module.
Take a look at this article, its 1st picture:
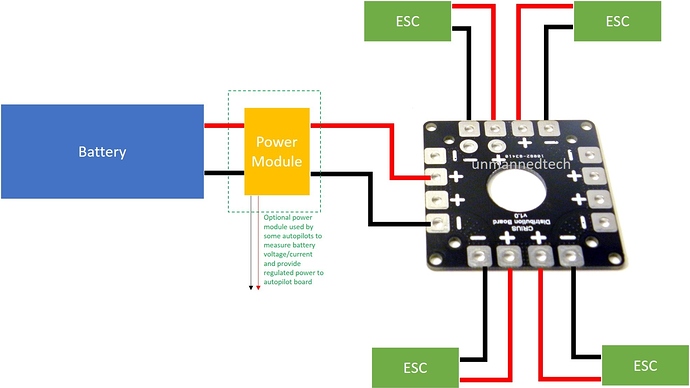
Btw, I already tried connecting 4-in-1 ESC without power module, directly to battery.
It did not work at all.
May be that was just my case. But for me it was failing without Power Module.
What type of esc did you have