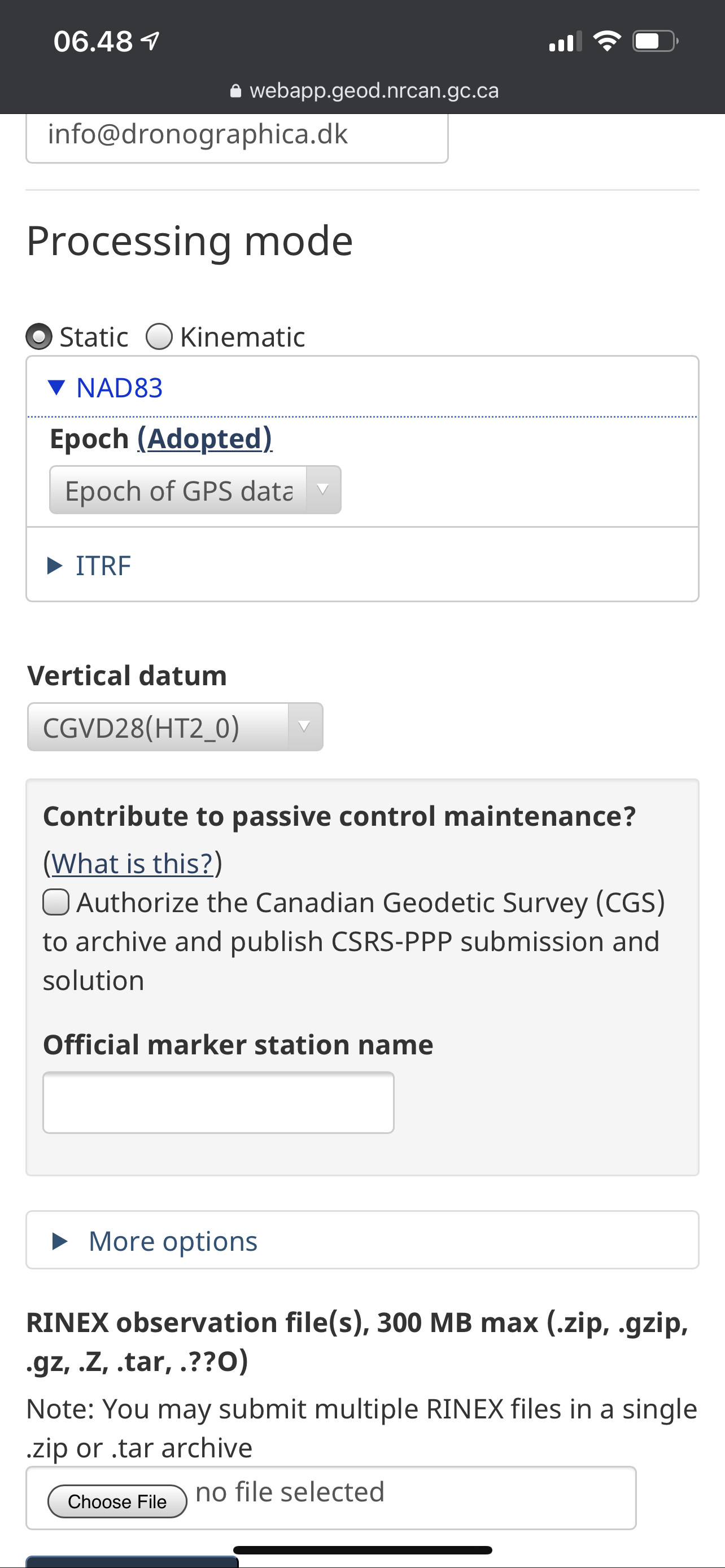
I am about to submit my RS2 PPP, I take it its in NAD83 already.
Then I will get the precise position back according to NAD83,
But my Trimble base works off of WGS84, so I take it I would need to transform those coordinates to WGS84 when it takes the RS2’s place on the monument.
If my base is interpreting position in WGS84, if I send those corrections to the RS2 I do get a fix, Is the accuracy of the position I am assuming is NAD83 on the RS2 valid while using that base?
Do base and rover datum’s have to match? If so how the hell do you keep it straight with commercial correction services?
Have I unlocked the real reason surveyors go to school, to sort this issue out?
Edit*** After much digging I got to the bottom of this;
The reach wants rtcm3 to be based off WGS84,
When you submit to NRCAN the PPP position is coming back as NAD83,
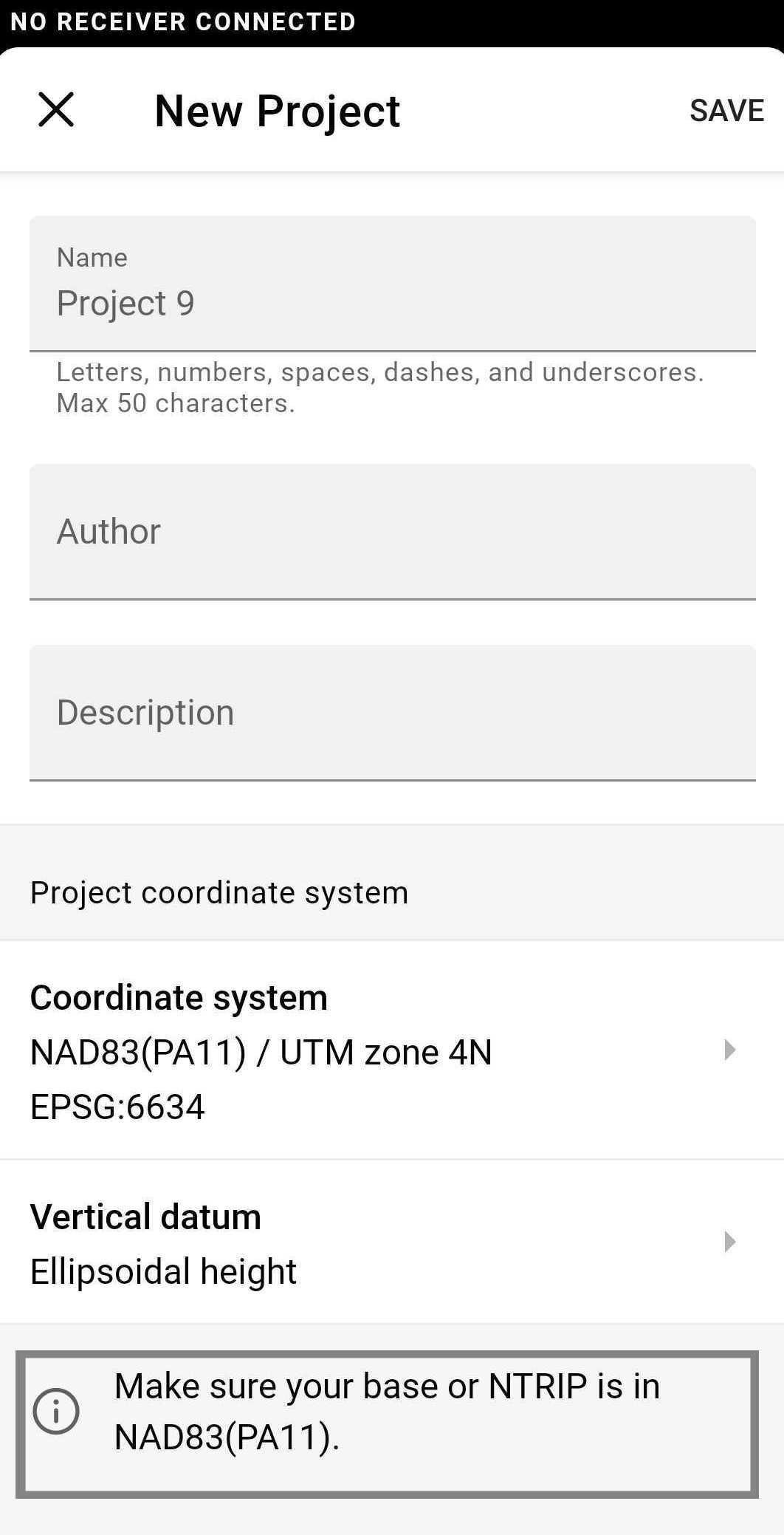
In RV3 by getting WGS84 corrections, you can survey natively (in my case naively) in NAD83 or other transformed coordinates for other datums.
My mind is This summer is going to be so boss doing farm stuff with my stick of truth!
Which base? I haven’t done it but I know it can be changed from WGS84. If I get a chance next week, I will see what it can be changed to. Not sure when, real busy right now with service calls/installs and deliveries pre-planting.
I just wanted to add that when you work with Reach receivers, the base coordinates should be in LLH format. RTCM3 messages support geographic coordinates only.
The base’s position needs to be in geographical coordinates that the app is capable to transform into the system you require.
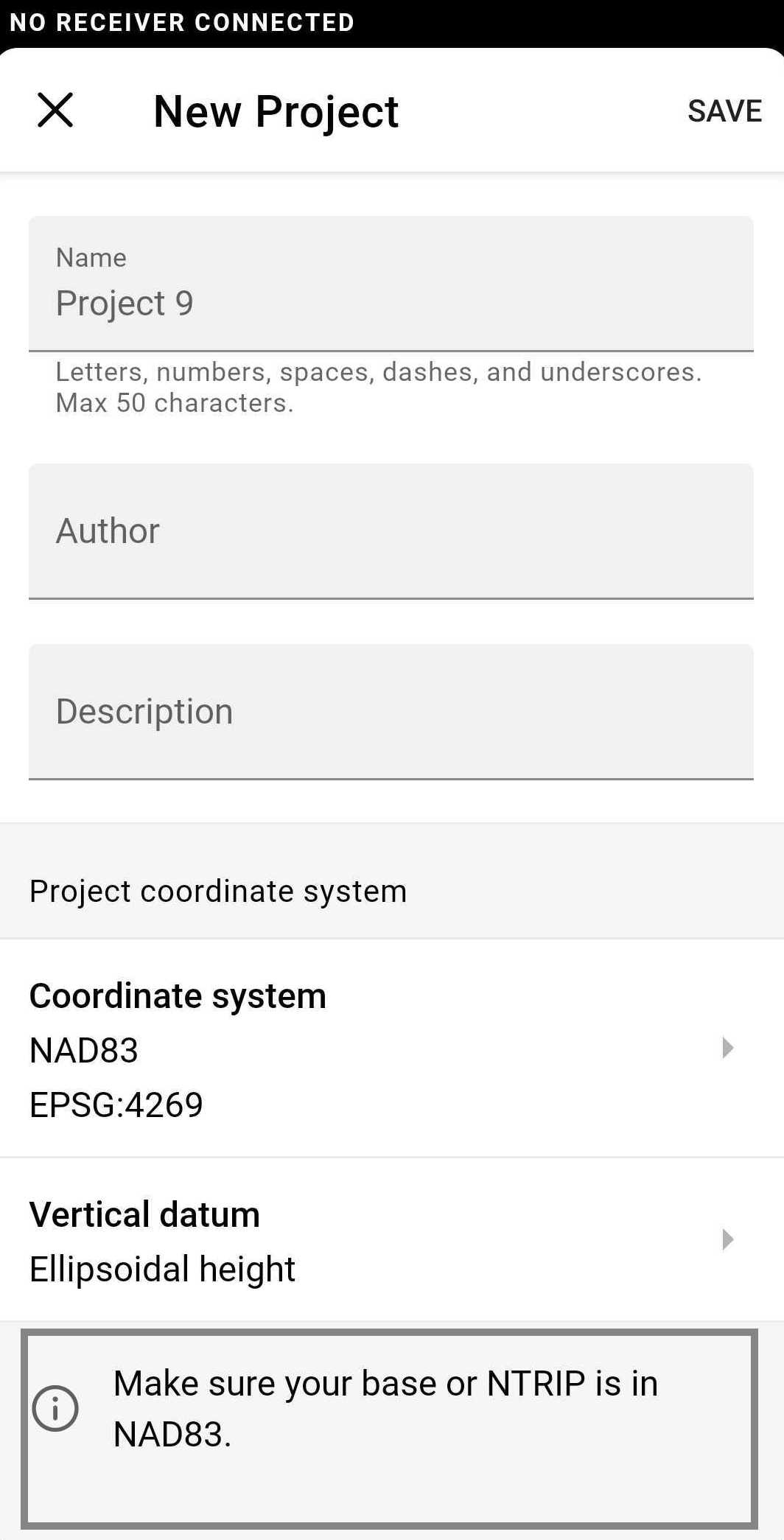
While collecting the points in ReachView 3, the app will help you to identify what coordinate system your base should be in for receiving the correct coordinates in the rover. For example:
I’m afraid I don’t fully understand what you’re trying to achieve here. If you’re trying to work in the NAD83-based coordinate system using ReachView 3, your base coordinate should be in NAD83 as well.
I thought the Emlid would just take the WGS84 base, and convert on the rover the coordinates to match the other systems.
So to use other Coordinate systems you need a special base for each? Or i just put the llh coordinates for the system I want to use in the RS2 base?
Does Snip convert base systems?
Just want to make sure my crosshairs are accurate. I have the plot plan of my yard and four pins put in by pros. So i have place to practice to see if i eventually get it right.
Edit: Ok I read enough RTK manuals i almost understand this.
The base corrections are only used to obtain the arp so that the rover can calculate baseline an vector from the base. Then the base tracks the satellites paths matched to this LLH position.
So really the base does not need to know the datum, but its LLH position has to be in
the datum used by the rover.
So any base can work on any datum LLH position, but the rover needs the brains to compute the actual position relative to that datum.
It depends on the specific coordinate system so it’s hard to tell. In case of NAD83 and WGS84, even though the difference between them in some places can be not that big, for the accurate position the rover should receive the base’s position in the required system.
Could you please specify what you mean by this? Do I get it correctly that you’d like the service to convert the base’s position?
SNIP is an NTRIP software that does a bunch of neat stuff.
But I think my plan now is run the Trimble on WGS84 for agriculture.
Place a second base antenna on the mount for a M2 or F9P, network it to a different port for NAD83 Corrections out of the same cellular base.
But I am now foreseeing the need for a second RS2 when I am outside the range of the cellular base.
Once I confirm that my NAD83 points match my yard survey, the next thing to learn is making a straight line between two points and plant some trees in the process.
Yes. The SNIP “PFAT” ™ tools do this as well as manipulate other Base Station message details. Most NTRIP Casters cannot do this as you must parse the RTCM stream and change content on the fly.
The most common use of this ability to express a Base Station location in another frame of reference. It is common to send two data streams from a single Base, each in its own frame of reference, when this needs to be supported. It is also used to correct mistakes in the ECEF message when you cannot get to. or control, the Base. All things being equal it is best to set the correct information, in the frame you desire to use, at the base itself.
Also, if you will combine multiple Bases in a what SNIP calls a NEAR stream (a form of network RTK), they need to all be in the same datum / frame of reference. The RTCM messages themselves do not provide any information on what datum is being used so one has to ask the data source. Always best to field check over a known location.
In RTK the Base is considered God and whatever location is says (right, wrong, accurate, or offset) is then used by Rover devices. Any error in the base translates directly to each Rover (NTRIP Client) using it.