Here you see a typical output for a few seconds. It is showing channel 5, used for setting flight mode. I left it at the same mode for the entire time, but you can clearly see the spike. I find similar spikes for all channels. Sometimes there is very little, other times a lot, but it always seems to go back to the correct level. The copter makes small twitches, but continues to fly. I’m going to try a different receiver (FrSky DR4-II). And examine the signal with a scope, once I get it…
Could this be a software issue? Or is do you think it is due to onboard noise, Or perhaps the CPPM signal from EzUHF is not 100% compatible…? (When I think about it I notice something similar with my previous quad too, but is was less noticeable.)
What does RPi do apart from running APM? What code do you currently use? The latest diydrones/master or emlid/navio?
It’d be really helpful if you sent us a log file using both of them? There’d been a couple of changes that haven’t been merged into emlid/navio so far. It’d be also terrific to have a log for a launch with updated sched-rcin priority.
This command changes the priority: sudo chrt -f -p 99 <sched-rcin PID>
This can help figure out sche-rcin’s PID: ps -eT | grep sched-rcin | awk '{print $2;}'
I’m using the one from emlid/navio Arducopter v3.3 dev (9e506e97). I’m currently only running Arducopter.
Did another test yesterday, trying to disconnecting the signal to the ESCs. And all of a sudden there was a perfect PPM signal. I then reconnected the ESCs and still a perfect signal. At the moment I cannot reproduce the problem…quite frustrating
I need some more time to test it out, the problem seems to come and go. Soon I’ll have a scope, perhaps this will give me some insight to what is going on…
I’ll try the priority settings you suggest, once the problem reappears.
The RF signal to the RX seems to be ok, The EzUHF LQ signal is 100%. The metal plate is mainly a groundplane for the GPS antenna, it is fixed with bolts and rigidly mounted to the board, I do not think there is any chance it will touch or short the board. Yes, it might very well be that the cables crossing close to the board could be a problem. I tried moving them around a little, but could not see any difference…
I’m wondering if a problem could be that I have quite long cables powering the ESCs as the ESCs are at the end of each arm. The general recommendation is to elongate the wires from the ESCs to the motors, not like I’ve done where I have elongated the wires from the battery to the ESCs. too long battery wires will kill ESC over time: precautions, solutions & workarounds - RC Groups
From what I understand long power wires to the ESCs strain the ESC, but I’m not sure the having long power wires to the ESCs cause noise and the could explain my “noisy” PPM signal.
Tried disconnecting the ESCs to see if that helped, but at the moment I cannot reproduce the problem… more testing needed…
Still very excited for your project, it’s been very interesting so far.
Just realized your quad is 1m+ in width/length! Wondered if it could be used for carrying a couple of kilograms in cargo in a pinch, and what kind of flight times it would get then.
Very exciting project on your hands, hope you resolve your output noise issues. Can’t wait for updates!
I have a normal RC receiver connected to PPM input of the Navio. This is my backup in case my internet connection disconnects.
To control it from a joystick on my PC it communicates via mavlink to the APM software running on RPi. Joystick -> PC -> Mission Planner -> Mavlink -> 4G Internet modem on PC -> Internet -> 4G Internet Modem on copter -> WiFi -> WiFi Adapter on RPi -> Mavlink to APM software on RPi
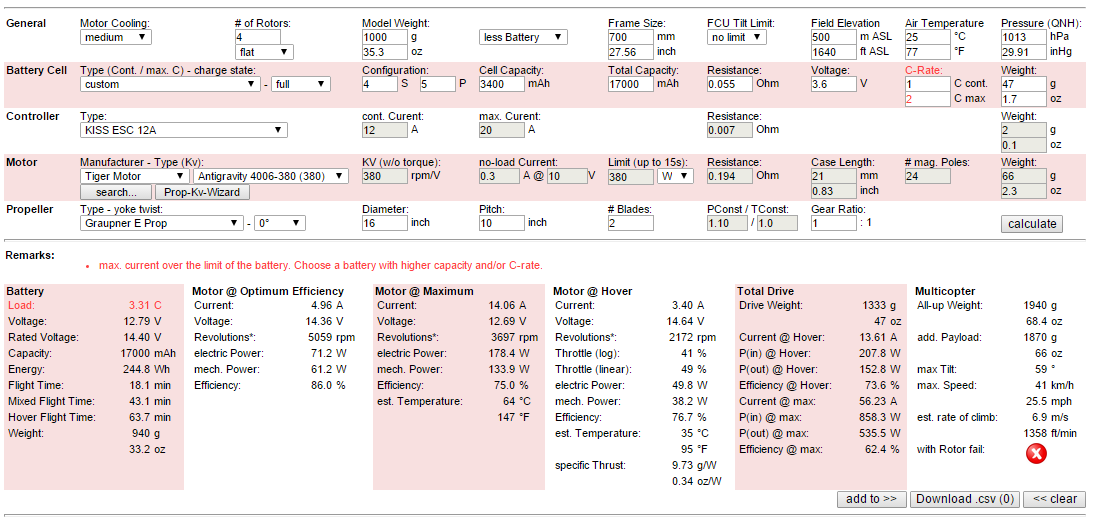
Just a quick status update: Currently the “PPM noise” issues is solved by shortening the wire from the Rx to NAVIO. The motor timing issue is also solved with the new ESCs using BL Heli. The PIDs is next. It is ok in stabilize mode, but unstable in loiter. More testing and tuning is needed. Possibly the propellers are little too big and slow, so I am going to try some smaller ones with higher pitch. (Graupner 16x10) I’ve also temporarily added a second RPi2 to get a better video stream. After I glued the whole frame, it is surprisingly stiff, but now the arms have some resonance frequencies close to the RPM of the motors. This is causing some vibrations at certain RPMs. I will try to add a light CF beam from the front arm to the rear arm on each side.
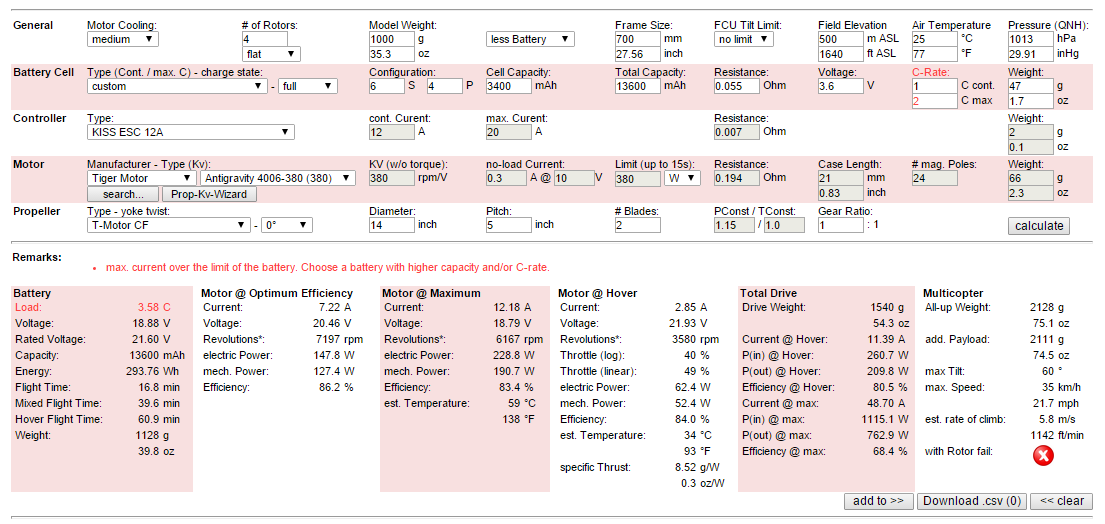
For these motors, try a 15x5.5 or 16x5.5 @ 24v , you won’t be disappointed!
Shortening the arms a bit will do wonders on vibes, and should help clean up the loiter performance. Those 16mm tubes just don’t do well at longer lengths. In addition to pid tuning of course!
I am running mn4010 370kv motors w/ xrotor esc’s & 15x5.5 props @ 24v. It’s awesome sauce.
Thanks, great tips! I think you are right, a higher voltage on these motors would be better.
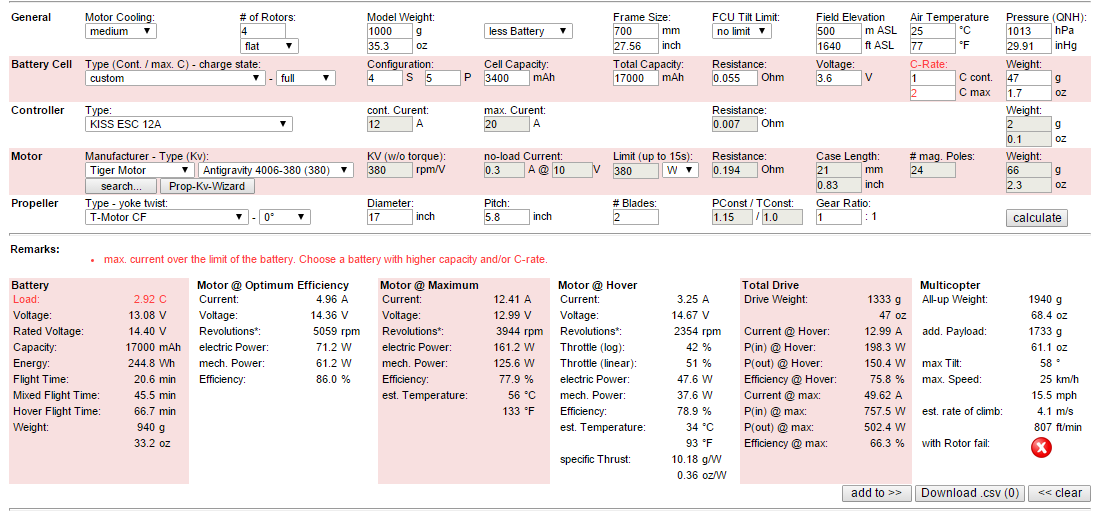
I think I have focused too much on hover time, at the sacrifice of general flight performance and resistance to wind. The lift power is not the problem. It can lift close to twice its weight, but I suspect the propeller air speed is too low, and perhaps the inertia of the large propellers causes problems too.
At the moment, it is the current sensor that is holding me back from trying a higher voltage as it is limited to 4S. Some work is required to change it, so I just wanted to see if smaller props (with a higher pitch to get enough lift) will improved the flight performance. If they do I think I’ll be forced to resolder the battery and change the sensor. The will as you say allow me to shorten the booms and probably fix the vibration issues (and save weight)