Common ESC is card programmable (easy if you purchased the card with the ESC) or RC programmable, using your RC tx and a receiver, following the instruction specific to the ESC and not missing tones…
BLHeli are easy to set but RC passtrought don’t work on Navio. As Navio is not compatible with DShot and Oneshot doesn’t work since arducopter 3.6 appearance, no need to go this way unless Emlid solve the Oneshot bug.
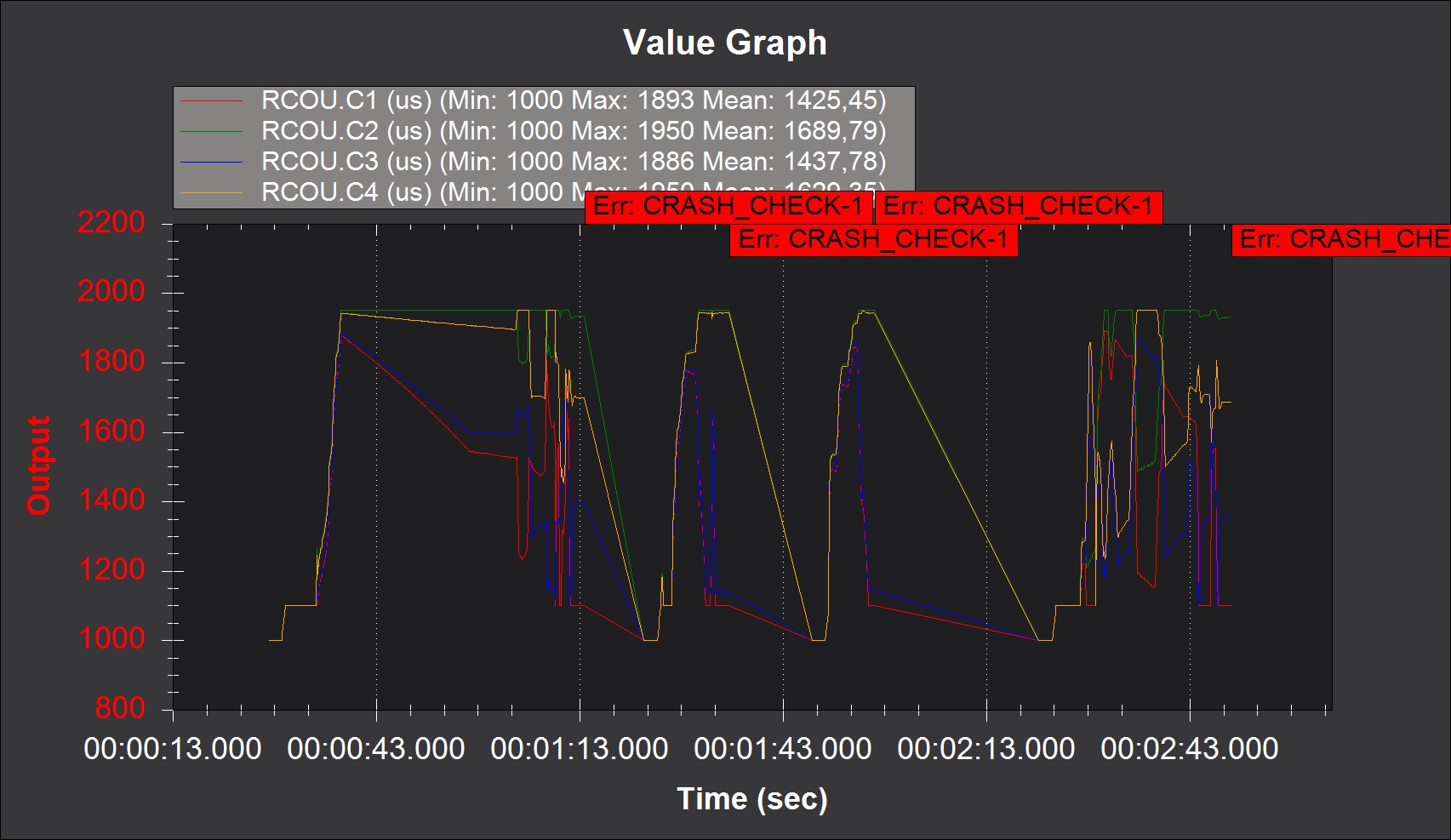
There is one or more motors not flat. One group of motors (3-4) need more power to maintain heading.
Your rig is too heavy or underpowered. Average RC out PWM is around 1700. You need more RPM (4S battery) or larger propellers if possible (check motor + ESC data).
Thanks a lot @mlebret for your help. I had noticed this problem in fact, especially the motor 3, tends to go in protection for the achievement of the minimum voltage and it stops like in a crash.
What I don’t understand is why only two engines and not all 4. The Escs are identical and the engines also. They are powered by the same branch plate connected to the battery.
@schuermannsebastian thank you for the advice but in the video my little daughter’s voice was heard too much and I didn’t like to keep it
I do a test today with a 4S battery and without propellers.
what I noticed is that, if I push the joysticks of the radio control to full scale, the motors slow down or increase speed according to the command, and this is correct, but if I hold the position for 3 seconds the engine 3 and the engine 4 slow down until it stops, generating the crash message.
When you can’t understand what’s happen on the ground is time to take off.
I have done an other flight. I have been very cautious and have had no accidents.
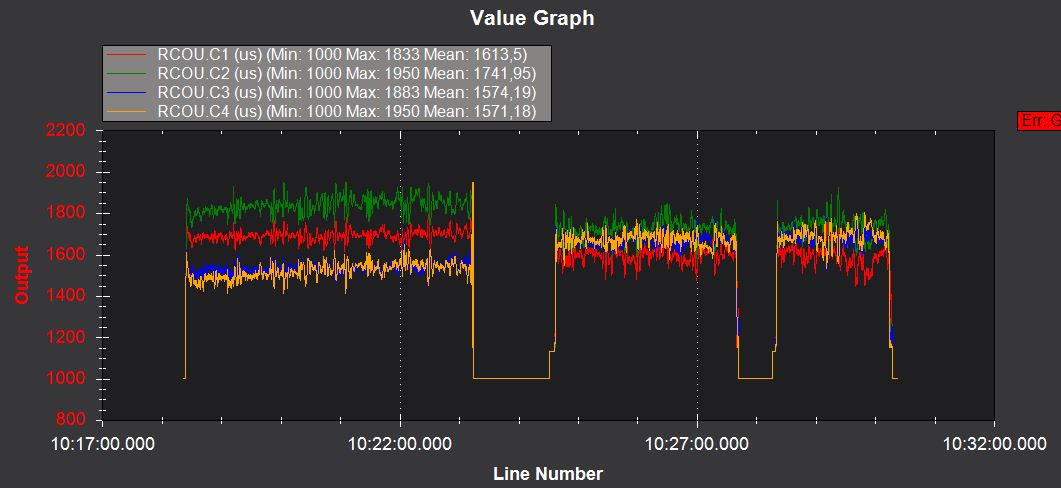
In this flight i used again the battery Lipo 3S - 5000 mAh 50c but I installed 10" propellers.
This is the graph relating to the outputs. At the beginning they were out of phase as in the previous flight but then they almost aligned on the same values.
I also made this video leaving the original audio this time. I could not do too many maneuvers because I had a remote control and a cell phone in my hand at the same time.
After having made some test flights always with discreet results today I decided to make the first flight in auto mode.
It was a very exciting flight even though in the end reviewing the LOG I still have two problems: that of unbalanced motors and that of interference on the compass.
However, the flight went well and I leave you the video I made.
@tatiana.andreeva Thanks for the appreciation of the video and for the reply.
For now I use only the two internal compass that I configured as indicated here on this site in the Ardupilot configuration section.
I also made the calibration with the CompassMot procedure but in that case the software did not report anything in particular to me.
For the moment, however, the imbalance on the engines worries me a little more. Do you have any indications regarding the connection of the Escs with BEC mode? My system is already powered by its power unit. I would not like that by connecting the power output from the 4 ESCs, interference would arise
After a big drone accident against a metal scaffolding I disassembled everything and reassembled the drone from scratch.
I decided to replace the Simonk Escs I had installed with the BL HELI DSHOT 1200 Escs.
Once the assembly and setup were complete, I made the first test flight and I was amazed.
The drone is now much more stable. The engines are perfectly balanced and magnetic interference has also decreased.
Despite the important dimensions, arm length 65cm, the drone flies up to 40km / h and I sent it up to 100m high.
I am very happy with the result and the next step will be to mount the antennas for the remote high distance transmission of telemetry in order to expand the guided flight range.
Not surprised by your experience. Different ESC’s use different update rates / speeds for the motor control. In fact some have the ability to select slow or fast update speeds in the ESC settings.
However, depending on the frequency used it can greatly affect interference and hence cause a problem. I lost one drone which was flying reasonably in original motor update speed but once I’ve changed the ESC settings to get a smother and more stable response I lost the drone (fly away) due to interference caused to the RC receiver blocking my signal.
…luckily was only a basic design and controller unit.